matlab怎么传数据到vrep
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab怎么传数据到vrep相关的知识,希望对你有一定的参考价值。
参考技术A vrep已经提供了和matlab的接口,通过Remote API进行连接,通过含有Get的函数从Vrep端读取数据,通过含有Set的函数将matlab的数据传输到vrep。VREP中的二维激光雷达
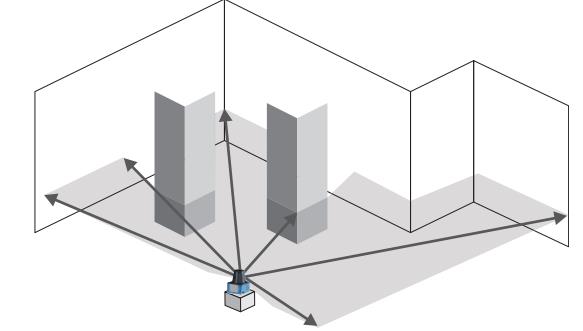
目前,轮式机器人的研究中已经大量使用激光雷达辅助机器人的避障导航,考虑到使用成本,一般二维激光雷达使用较多,如下图。由于只能扫描一个*面,如果想用二维激光雷达获取环境三维点云,则需要通过移动机器人或加装机械结构提供第三个维度的支持。
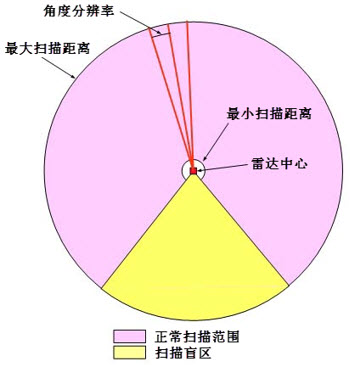
激光雷达通常有四个性能衡量指标:测距分辨率、扫描频率(有时也用扫描周期)、角度分辨率及可视范围。测距分辨率衡量在一个给定的距离下测距的精确程度,通常与距离真实值相差在5-20mm;扫描频率衡量激光雷达完成一次完整扫描的快慢,通常在10Hz及以上;角度分辨率直接决定激光雷达一次完整扫描能返回多少个样本点;可视范围指激光雷达完整扫描的广角,可视范围之外即为盲区。
- 使用视觉传感器模拟激光雷达
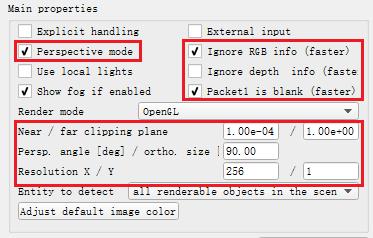
为了模拟二维激光雷达,将视觉传感器设为透视模型并只获取深度信息。near clipping plane和far clipping plane设置为激光雷达的最小/最大扫描距离;视场角Persp. angle设为雷达可视范围(角度);将Y轴分辨力率设为1,X轴分辨率可根据需求设置(分辨率越大结果越精确,分辨率过低可能会造成某些尺寸小的物体无法被探测到)。
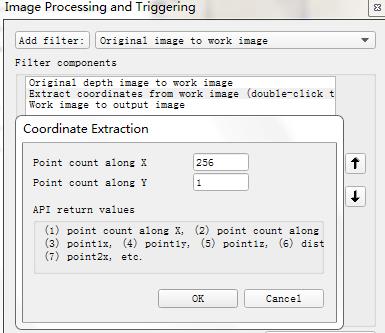
 视觉传感器filter设置如下,其中加入Extract coordinates from work image用来提取深度图像中坐标信息,这一环节返回的数据可以通过函数simReadVisionSensor来获取。参数设置界面上的Point count along X/Y设为X/Y轴分辨率,即调用一次相关API函数可以读取包含256个像素点的坐标信息的数据:
视觉传感器filter设置如下,其中加入Extract coordinates from work image用来提取深度图像中坐标信息,这一环节返回的数据可以通过函数simReadVisionSensor来获取。参数设置界面上的Point count along X/Y设为X/Y轴分辨率,即调用一次相关API函数可以读取包含256个像素点的坐标信息的数据:
为了显示激光雷达“看到”的环境,可以通过Graph来记录用户自定义数据流:按照下图所示在数据类型栏中选择user-defined,将自定义数据名分别修改为"x"和"y"用来记录障碍物相对于激光雷达的位置,并通过函数simSetGraphUserData(graphHandle, dataStreamName, data)来设置自定义数据的值。
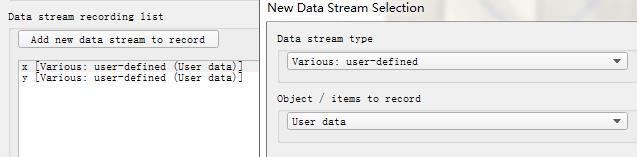
Graph:


if (sim_call_type==sim_childscriptcall_initialization) then -- Put some initialization code here graphHandle = simGetObjectAssociatedWithScript(sim_handle_self) end if (sim_call_type==sim_childscriptcall_sensing) then -- Put your main SENSING code here simResetGraph(graphHandle) data = simGetStringSignal("UserData") if data then measuredData = simUnpackFloatTable(data) for i=1,#measuredData/2,1 do simSetGraphUserData(graphHandle,\'x\',measuredData[2*(i-1)+1]) simSetGraphUserData(graphHandle,\'y\',measuredData[2*(i-1)+2]) simHandleGraph(graphHandle,0) end end end if (sim_call_type==sim_childscriptcall_cleanup) then -- Put some restoration code here simResetGraph(graphHandle) end --[[ Normally, simHandleGraph is called for you, in the main script. In that case, you can record one value in each simulation step. When you explicitely handle the graph, then you have the possibility to record more than one new graph point in each simulation step. --]]
Vision_sensor:
if (sim_call_type==sim_childscriptcall_initialization) then -- Put some initialization code here visionSensor1Handle = simGetObjectHandle("Vision_sensor") red={1,0,0} points=simAddDrawingObject(sim_drawing_points,5,0,-1,1000,red,nil,red,red) end if (sim_call_type==sim_childscriptcall_sensing) then -- Put your main SENSING code here measureData = {} m1=simGetObjectMatrix(visionSensor1Handle,-1) r,t1,u1=simReadVisionSensor(visionSensor1Handle) if u1 then for j=0,u1[2]-1,1 do -- point count along Y for i=0,u1[1]-1,1 do -- point count along X w=2+4*(j*u1[1]+i) -- index v1=u1[w+1] -- x v2=u1[w+2] -- y v3=u1[w+3] -- z v4=u1[w+4] -- dist if(v4 < 0.99) then --[[ p={v1,v2,v3} p=simMultiplyVector(m1,p) -- convert point from visionSensor1 coordinates to world coordinates simAddDrawingObjectItem(points, p) --]] table.insert(measureData, v1) table.insert(measureData, v3) end end end stringData = simPackFloats(measureData) -- Packs a table of floating-point numbers into a string simSetStringSignal("UserData", stringData) end end if (sim_call_type==sim_childscriptcall_cleanup) then -- Put some restoration code here simRemoveDrawingObject(points) end
在场景中加入浮动窗口,并将Graph与窗口关联,切换到X-Y曲线显示(取消坐标轴自动缩放,坐标轴比例设为1:1)

- SICK TiM310
VREP模型浏览器的components/sensors目录中包含多种激光雷达,其中德国SICK传感器推出的迷你激光测量系统TiM310可视范围为270°,角度分辨率为1°,探测距离为0.05m~4m,扫描频率15Hz,功耗4W。
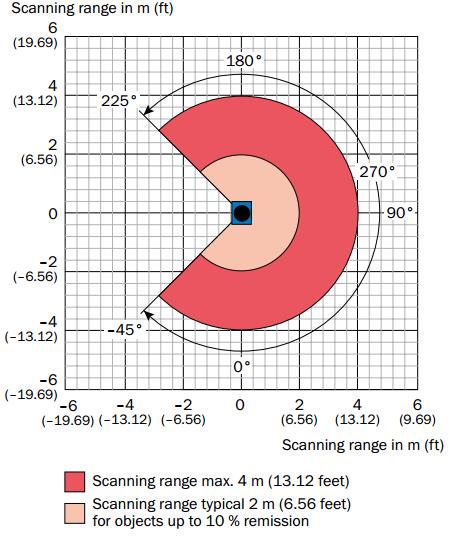
operating range diagram
由于是用视觉传感器来模拟激光雷达,因此270°的可视范围对于一般视觉传感器来说太大(普通广角镜头视角在60-84度,超广角镜头的视角为94-118度,鱼眼镜头视角在220-230度),可以拆分为2个视角135°的视觉传感器来凑成270°:
视角参数和远*剪切*面设置如下:

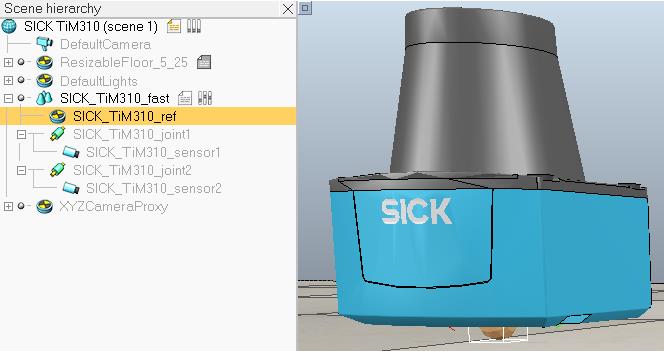
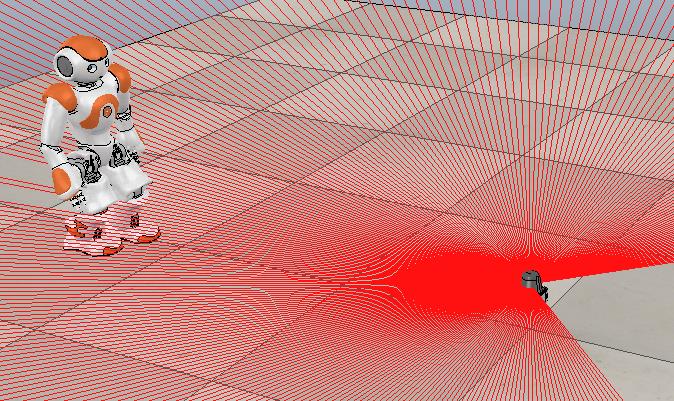
激光雷达获取的位置数据要在参考坐标系SICK_TiM310_ref中描述,而simReadVisionSensor获取的像素点坐标是相对于视觉传感器坐标系的,因此需要使用矩阵变换将其转换到SICK_TiM310_ref参考系中。用画笔在场景中画出激光雷达的扫描线,需要得知线段起点和终点坐标,这一坐标是在世界坐标系下描述的,因此一共涉及3个坐标系之间的变换。
if (sim_call_type==sim_childscriptcall_initialization) then visionSensor1Handle=simGetObjectHandle("SICK_TiM310_sensor1") visionSensor2Handle=simGetObjectHandle("SICK_TiM310_sensor2") joint1Handle=simGetObjectHandle("SICK_TiM310_joint1") joint2Handle=simGetObjectHandle("SICK_TiM310_joint2") sensorRefHandle=simGetObjectHandle("SICK_TiM310_ref") -- the base of SICK LiDAR maxScanDistance=simGetScriptSimulationParameter(sim_handle_self,\'maxScanDistance\') if maxScanDistance>1000 then maxScanDistance=1000 end if maxScanDistance<0.1 then maxScanDistance=0.1 end simSetObjectFloatParameter(visionSensor1Handle,sim_visionfloatparam_far_clipping,maxScanDistance) simSetObjectFloatParameter(visionSensor2Handle,sim_visionfloatparam_far_clipping,maxScanDistance) maxScanDistance_=maxScanDistance*0.9999 scanningAngle=simGetScriptSimulationParameter(sim_handle_self,\'scanAngle\') if scanningAngle>270 then scanningAngle=270 end if scanningAngle<2 then scanningAngle=2 end scanningAngle=scanningAngle*math.pi/180 simSetObjectFloatParameter(visionSensor1Handle,sim_visionfloatparam_perspective_angle,scanningAngle/2) simSetObjectFloatParameter(visionSensor2Handle,sim_visionfloatparam_perspective_angle,scanningAngle/2) simSetJointPosition(joint1Handle,-scanningAngle/4) simSetJointPosition(joint2Handle,scanningAngle/4) red={1,0,0} lines=simAddDrawingObject(sim_drawing_lines,1,0,-1,1000,nil,nil,nil,red) if (simGetInt32Parameter(sim_intparam_program_version)<30004) then simDisplayDialog("ERROR","This version of the SICK sensor is only supported from V-REP V3.0.4 and upwards.&&nMake sure to update your V-REP.",sim_dlgstyle_ok,false,nil,{0.8,0,0,0,0,0},{0.5,0,0,1,1,1}) end end if (sim_call_type==sim_childscriptcall_cleanup) then simRemoveDrawingObject(lines) end if (sim_call_type==sim_childscriptcall_sensing) then measuredData={} if notFirstHere then -- We skip the very first reading simAddDrawingObjectItem(lines,nil) showLines=simGetScriptSimulationParameter(sim_handle_self,\'showLaserSegments\') r,t1,u1=simReadVisionSensor(visionSensor1Handle) r,t2,u2=simReadVisionSensor(visionSensor2Handle) m1=simGetObjectMatrix(visionSensor1Handle,-1) m01=simGetInvertedMatrix(simGetObjectMatrix(sensorRefHandle,-1)) m01=simMultiplyMatrices(m01,m1) -- transformation matrix between base and visionSensor m2=simGetObjectMatrix(visionSensor2Handle,-1) m02=simGetInvertedMatrix(simGetObjectMatrix(sensorRefHandle,-1)) m02=simMultiplyMatrices(m02,m2) if u1 then p={0,0,0} p=simMultiplyVector(m1,p) -- convert the origin of visionSensor1 coordinates to world coordinates t={p[1],p[2],p[3],0,0,0} for j=0,u1[2]-1,1 do -- point count along Y for i=0,u1[1]-1,1 do -- point count along X w=2+4*(j*u1[1]+i) -- index v1=u1[w+1] -- coordinate x of detected point(Coordinates are relative to the vision sensor position/orientation.) v2=u1[w+2] -- coordinate y of detected point v3=u1[w+3] -- coordinate z of detected point v4=u1[w+4] -- distance to detected point if (v4<maxScanDistance_) then p={v1,v2,v3} p=simMultiplyVector(m01,p) -- describe position in LiDAR base coordinates table.insert(measuredData,p[1]) table.insert(measuredData,p[2]) table.insert(measuredData,p[3]) end if showLines then -- draw laser line p={v1,v2,v3} p=simMultiplyVector(m1,p) -- convert point from visionSensor1 coordinates to world coordinates t[4]=p[1] t[5]=p[2] t[6]=p[3] simAddDrawingObjectItem(lines,t) end end end end if u2 then p={0,0,0} p=simMultiplyVector(m2,p) t={p[1],p[2],p[3],0,0,0} for j=0,u2[2]-1,1 do for i=0,u2[1]-1,1 do w=2+4*(j*u2[1]+i) v1=u2[w+1] v2=u2[w+2] v3=u2[w+3] v4=u2[w+4] if (v4<maxScanDistance_) then p={v1,v2,v3} p=simMultiplyVector(m02,p) table.insert(measuredData,p[1]) table.insert(measuredData,p[2]) table.insert(measuredData,p[3]) end if showLines then p={v1,v2,v3} p=simMultiplyVector(m2,p) t[4]=p[1] t[5]=p[2] t[6]=p[3] simAddDrawingObjectItem(lines,t) end end end end end notFirstHere=true -- measuredData now contains all the points that are closer than the sensor range -- For each point there is the x, y and z coordinate (i.e. 3 number for each point) -- Coordinates are expressed relative to the sensor frame. -- You can access this data from outside via various mechanisms. The best is to first -- pack the data, then to send it as a string. For example: -- -- -- data=simPackFloatTable(measuredData) -- simSetStringSignal("measuredDataAtThisTime",data) -- -- Then in a different location: -- data=simGetStringSignal("measuredDataAtThisTime") -- measuredData=simUnpackFloatTable(data) -- -- -- Of course you can also send the data via tubes, wireless (simTubeOpen, etc., simSendData, etc.) -- -- Also, if you send the data via string signals, if you you cannot read the data in each simulation -- step, then always append the data to an already existing signal data, e.g. -- -- -- data=simPackFloatTable(measuredData) -- existingData=simGetStringSignal("measuredDataAtThisTime") -- if existingData then -- data=existingData..data -- end -- simSetStringSignal("measuredDataAtThisTime",data) end
获得测量数据后,可以使用函数将包含坐标值的一维列表打包成字符串,并设置字符串信号。在另一个需要使用传感器数据的脚本中读取字符串信号,然后将其解压成列表:
data = simPackFloatTable(measuredData) simSetStringSignal("measuredDataAtThisTime", data) -- Then in a different location: data = simGetStringSignal("measuredDataAtThisTime") measuredData = simUnpackFloatTable(data)
参考:
以上是关于matlab怎么传数据到vrep的主要内容,如果未能解决你的问题,请参考以下文章