STM32F10驱动A4988步进电机驱动模块程序
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F10驱动A4988步进电机驱动模块程序相关的知识,希望对你有一定的参考价值。
参考技术A 本人没用过A4988,但你给出的数据有明显错误:1、VBB(电机电源):最小8V最大35V,你用(VMOT接+5V)5V;(A4988资料上没VMOT这一接口)。
2、ENABLE(使能)端口接+A4988才能工作,你给它0V即是叫它休息不必工作。
以上
嵌入式&单片机一文带你搞懂电机驱动模块
1. 基本原理
1.1 控制电机转速
在电机两端施加电压,电机就会旋转,而且电压越大,转速越快
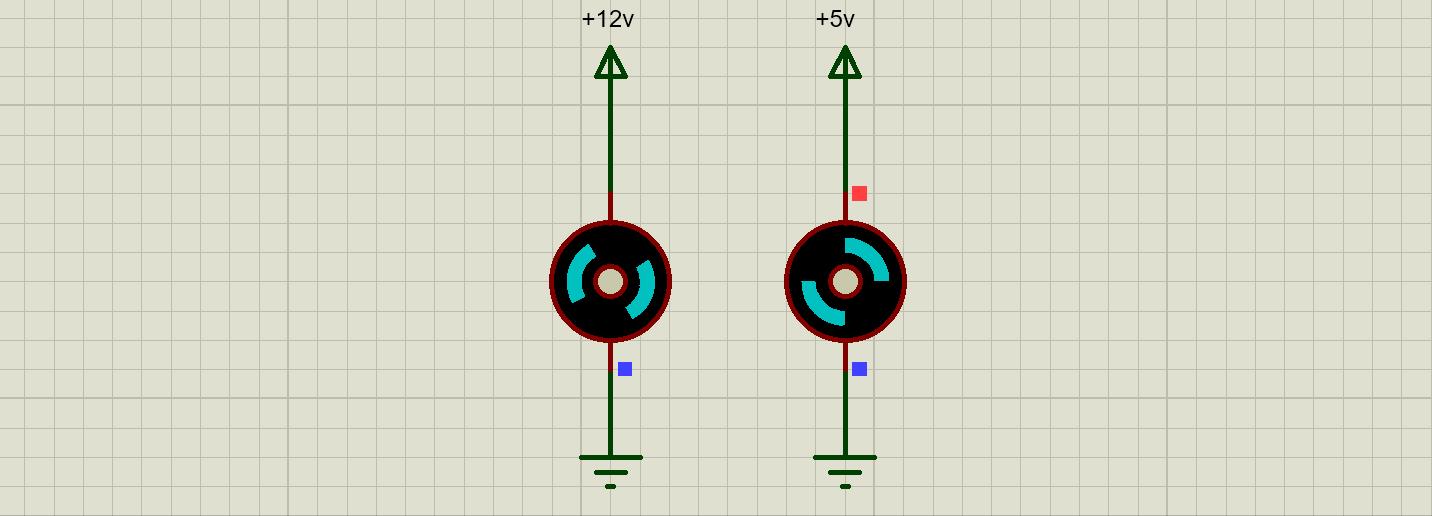
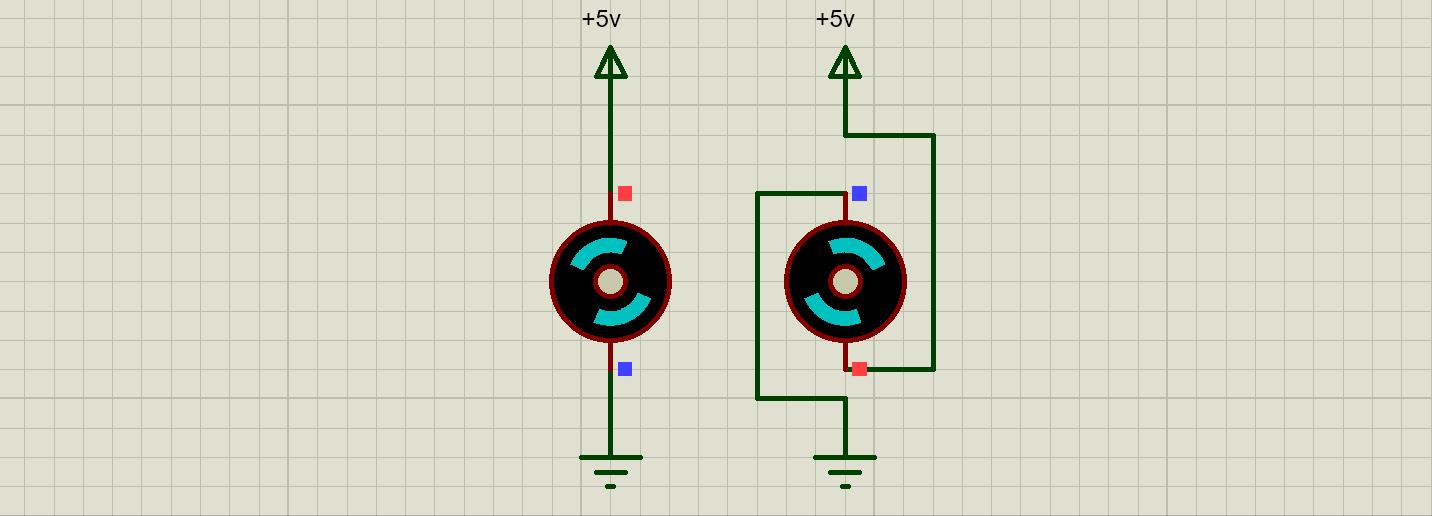
1.2 控制电机旋转方向
通正向电压电机正转,反向电压电机反转
2. H桥驱动
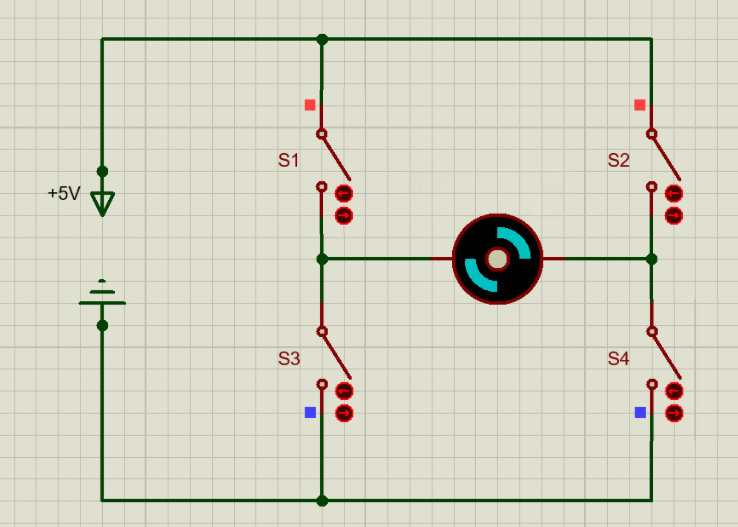
2.1 H桥驱动名称的由来
在上图中,四个开关和电机构成了一个驱动电路,因为形状像字母“H”,所以称作 H桥驱动。
2.2 H桥驱动控制电机旋转方向
在本篇博客中,当电机两端的电压方向为从左到右时,电机的旋转方向为正向.
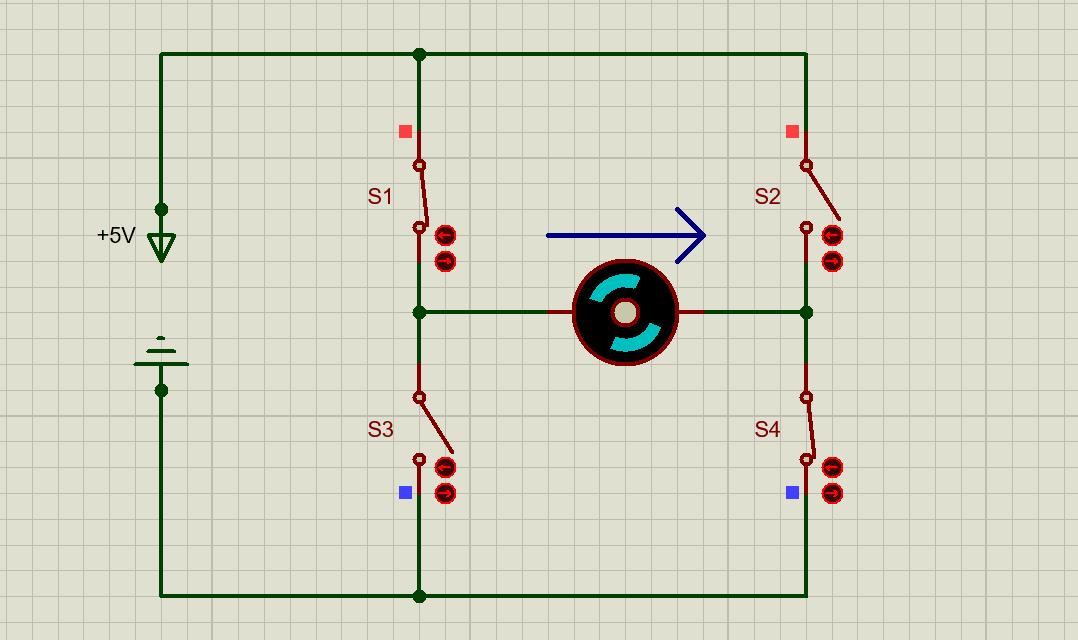
2.2.1 如上图,闭合开关 S1 和 S4,电机两端的电压方向为从左到右,电机正转

2.2.1 如上图,闭合开关 S2 和 S3,电机两端的电压方向为从右到左,电机反转
2.3 H桥驱动
在实际的应用中,并不会使用开关去驱动电机,而是一种类似开关的元器件–MOS管。
MOS管的导通条件比较繁琐,我们可以简单的认为:
- 接入高电平,MOS管导通
- 接入低电平,MOS管断开
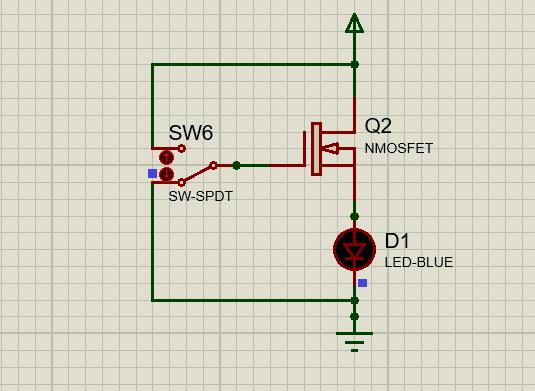
所以,实际应用中的 H桥驱动 是下面的样子
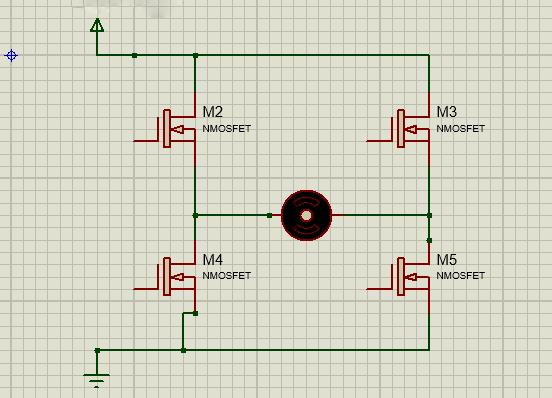
3. 电机驱动模块
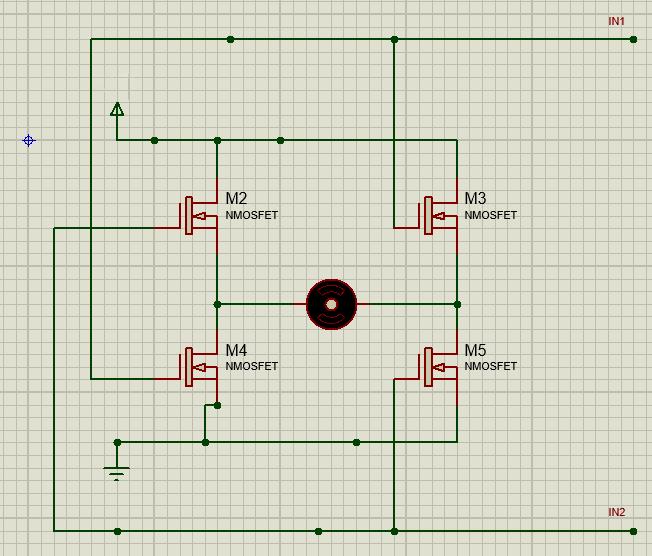
3.1 两个控制引脚的电机驱动
-
当 IN1 = 0,IN2 = 1
- M2 和 M5 导通,电机两端的电压方向为从左到右,电机正转
-
当 IN1 = 1,IN2 = 0
- M3 和 M4 导通,电机两端的电压方向为从左到右,电机反转
-
当 IN1 = 0,IN2 = 0
- M2、M3、M4、M5 全部断开,电机不转
-
当 IN1 = 1,IN2 = 1
- M2、M3、M4、M5 全部导通,电机不转(电机驱动模块中s包含保护电路,所以在这种情况下并不会发生短路)
3.2 三个控制引脚的电机驱动
三个控制引脚的电机驱动是在 IN1、IN2 控制脚的基础上,增加了一个控制 IN1 和 IN2 通断的管脚 ENA(如下图)。

- 当 ENA = 1
- 控制方式与 3.1 的控制方式相同
- 当 ENA = 0
- 电机停止转动
3.3 电机驱动模块的组成
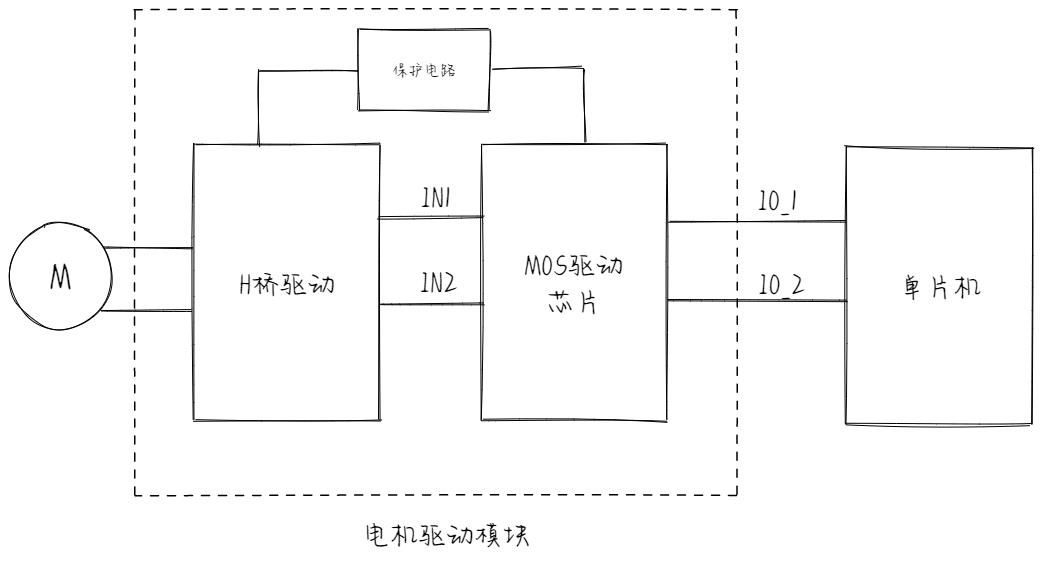
电机驱动模块除了内部的 H桥驱动 ,还由 保护电路、上下拉电阻、MOS管驱动芯片(单片机不能直接控制MOS管) 等组成。
4. 使用单片机控制电机驱动
4.1 三个控制引脚的电机驱动
4.1.1 接线
- ENA <-> PWM引脚
- IN1 <-> 普通IO口
- IN2 <-> 普通IO口

4.1.2 控制方式
控制转速
调节 ENA 引脚 PWM 的占空比
- 当 PWM = 0,电机停止转动
- 当 PWM = 100%,电机转速达到最大
控制转向
请参考 3.1
4.2 两个控制引脚的电机驱动
Tip:三个控制引脚的电机驱动也可以使用下面的控制方式,但是需要将其中的 ENA脚 接 VCC。
4.2.1 方式1 - 两路PWM
4.2.1.1 接线
- IN1 <-> PWM1
- IN2 <-> PWM2
4.2.1.2 控制方式
要保证 PWM1 和 PWM2 的频率相同(通常为 10k HZ),频率与电机驱动模块和电机的规格有关,具体控制频率需要参考相关规格书。
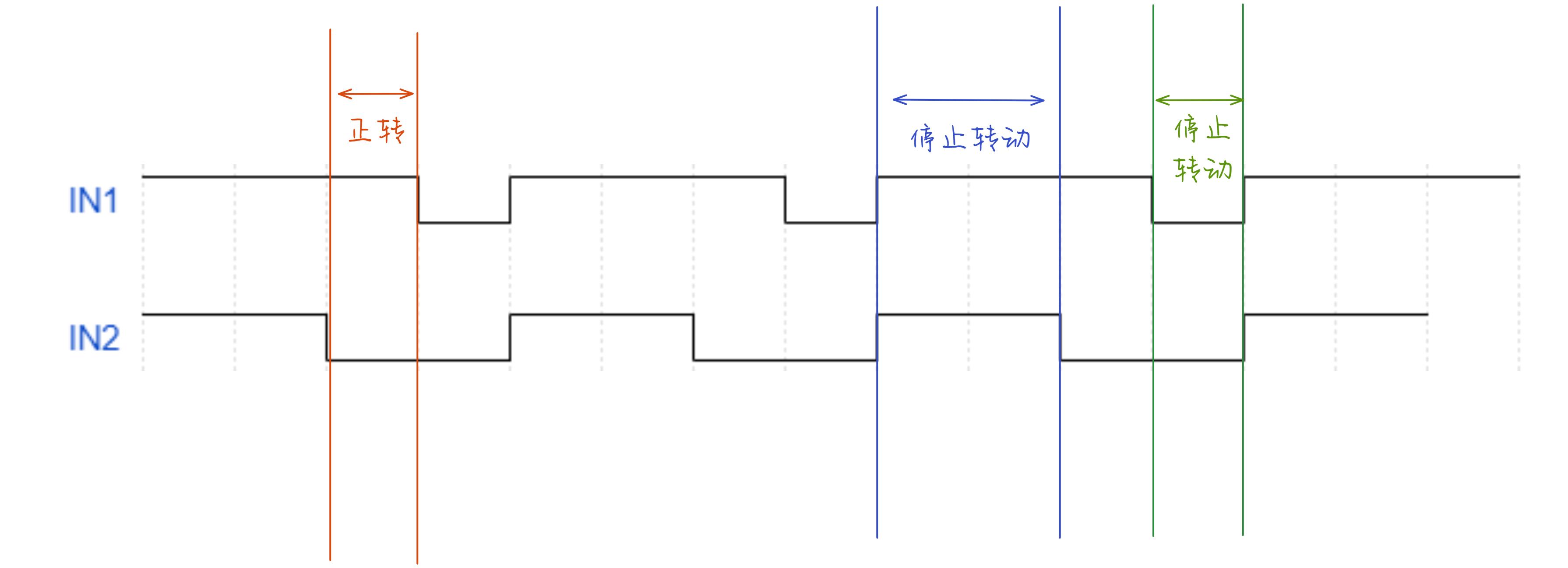
PWM1 占空比>PWM2 占空比(如上图)- 电机正转
- 电机的转速与
PWM1 占空比-PWM2 占空比有关
PWM1 占空比<PWM2 占空比- 电机反转
- 电机的转速与
PWM2 占空比-PWM1占空比有关
PWM1 占空比=PWM2 占空比- 电机停止转动
4.2.2 🌟 方式2 - 一路PWM,一路 GPIO
4.2.2.1 接线
- IN1 <-> PWM (通常为 10k HZ)
- IN2 <-> DIR (普通GPIO引脚)
4.2.2.2 控制方式
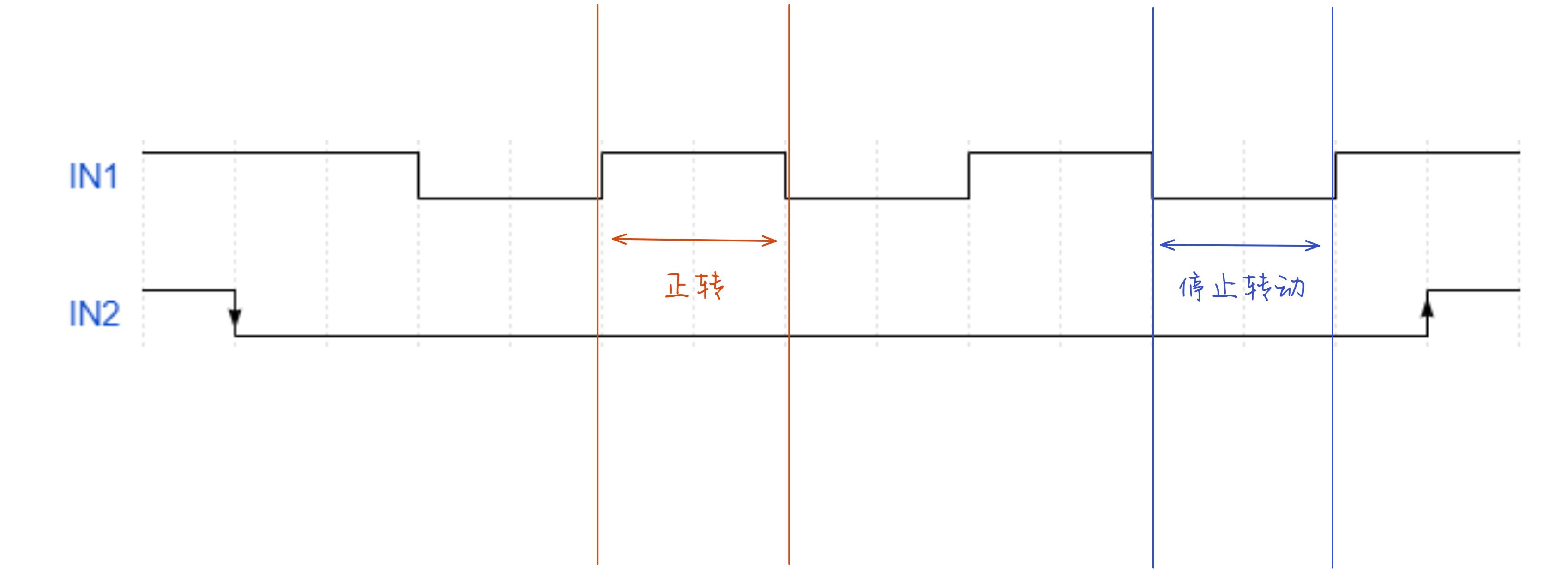
- DIR = 0(见上图)
- 电机正转
- 转速与 PWM 的正向占空比有关
- PWM = 100% 时,电机正向转速最大
- PWM = 0 时,电机停止转动
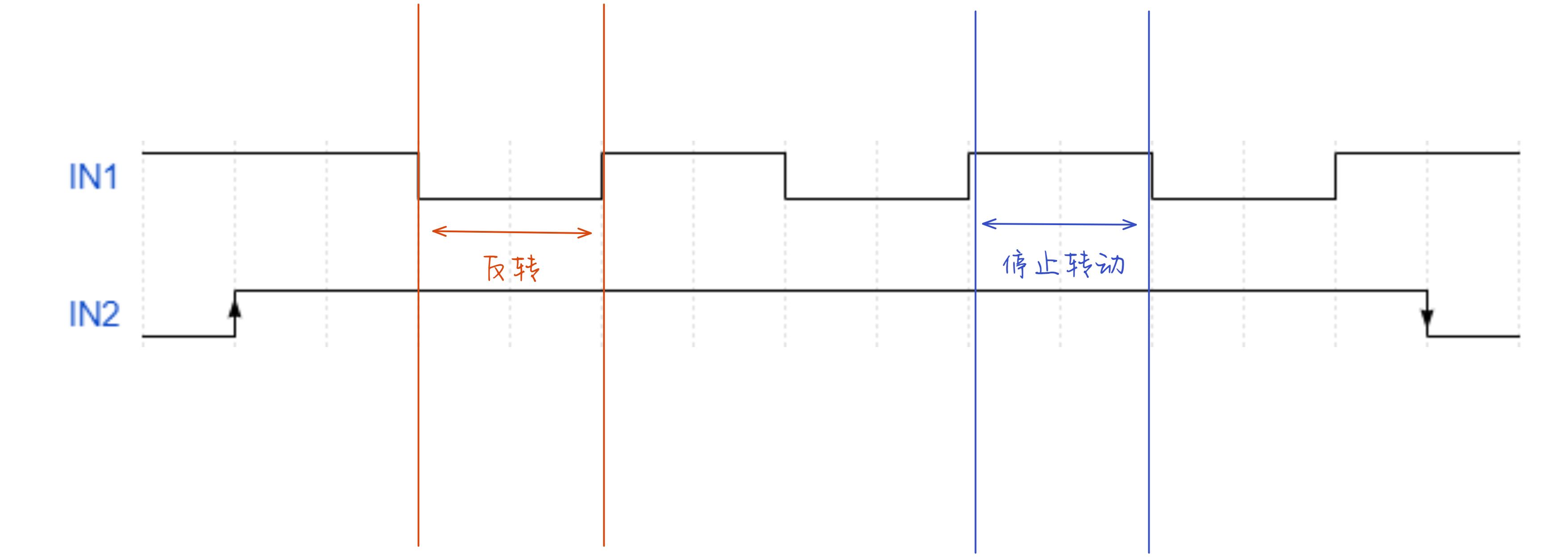
- DIR = 1 (见上图)
- 电机反转
- 转速与 PWM 的反向占空比有关
- PWM = 0 时,电机反向转速最大
- PWM = 100% 时,电机停止转动
5. 实战 - 使用 Arduino 控制电机
使用的电机驱动是 L298N
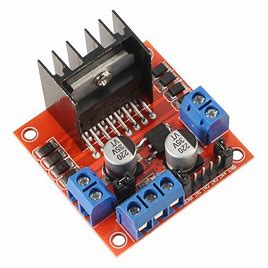
它的原理图如下
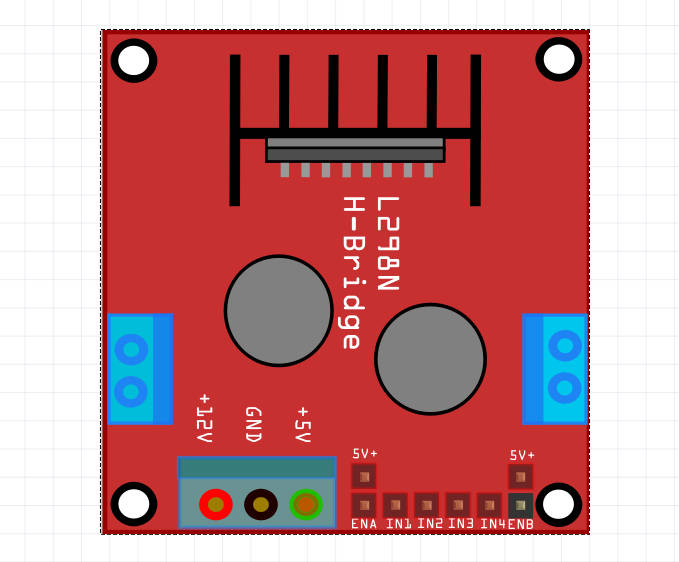
L29N是一个双路驱动,它可以同时驱动两个电机
- ENA,IN1,IN2 控制左边的电机
- ENB,IN2,IN3 控制右边的电机
使用的控制方式是 4.1 的控制方式。
接线如下:
- ENA <-> D11 (注意:一定要接PWM引脚)
- IN1 <-> D10
- IN2 <-> D9
代码:
/*
* @Author: CloudSir
* @Github: https://github.com/cloudsir
* @Date: 2022-01-11 12:52:48
* @LastEditTime: 2022-01-11 12:58:13
* @LastEditors: CloudSir
* @Description: Arduino 控制电机
*/
#define ENA 11
#define IN1 10
#define IN2 9
// speed的范围 -255 ~ 255
void setMotorSpeed(int speed)
if(speed > 0)
// 如果速度大于0,则正转
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
else (speed < 0)
// 如果速度小于0,则反转
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
else
// 如果速度等于0,则停止转动
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
analogWrite(ENA, abs(speed));
void setup()
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
void loop()
int i = 0;
// 电机正向旋转,速度逐渐增加
for(i = 0; i <= 255; i++)
setMotorSpeed(i);
delay(100);
// 电机正向旋转,速度逐渐减小
for(i = 255; i >= 0; i--)
setMotorSpeed(i);
delay(100);
// 电机反向旋转,速度逐渐增加
for(i = 0; i <= 255; i++)
setMotorSpeed(-i);
delay(100);
// 电机反向旋转,速度逐渐减小
for(i = 255; i >= 0; i--)
setMotorSpeed(-i);
delay(100);
6. 实战 - 使用 STM32F103 控制电机
4.2.2 中控制电机驱动的方式最常用,但它的逻辑有些难理解,我们将以这种控制方式为例。
6.1 接线
使用的驱动是 5. 中的 L298N
- ENA <-> VCC (改装为2线驱动)
- IN1 <-> DIR (任意一个GPIO口)
- IN2 <-> PWM (任意一个PWM输出口)
6.2 PWM设置
首先对 STM32 的PWM模式进行设置:
- 定时器为
向上计数 - 定时器频率设置为 10k HZ
- PWM模式为
模式1 - PWM有效电平为
高电平
名词规定:
maxPulse:定时器的最大计数值cnt:当前计数器值duty:占空比 ,duty=pulse/maxPulsepulse:比较寄存器的值
此时在一个PWM周期内,
- 当
cnt<pulse, PWM 引脚输出高电平 - 当
cnt>=pulse, PWM 引脚输出低电平

6.3 原理分析

参考 4.2.2 的控制方式,结合上图:
- 当 DIR = 0 时,电机正转,电机的转速取决于正向占空比 ,此时
duty=pulse/maxPulse - 当 DIR = 1 时,电机反转,电机的转速取决于反向占空比,此时
duty= (maxPulse-pulse) /maxPulse
所以可以写出下列 伪代码:
// speed最大值是maxPulse, 最小值是 -maxPulse
// speed为正数时正转,为负数时反转
void setSpeed(int speed)
// 限幅
if(speed > maxPulse)
speed = maxPulse;
else if(speed < -maxPulse)
speed = -maxPulse;
if (speed > 0)
// 正转
DIR = 0;
pulse = speed;
setPulse(pulse);
else if (pulse < 0)
// 反转
DIR = 1;
pulse = maxPulse + speed; // 这时speed是负数
setPulse(pulse);
else
// 停止转动
DIR = 1;
pulse = maxPulse;
setPulse(pulse);
6.4 代码
明白了原理后,不难写出上面的代码,所以这里先不给出代码了。
本文由 CloudSir 原创,转载请在CSDN私信
以上是关于STM32F10驱动A4988步进电机驱动模块程序的主要内容,如果未能解决你的问题,请参考以下文章
用HAL库结合STM cube编写代码控制stm32f103c8t6来驱动减速电机实现慢快逐步切换转动