【CV论文笔记】MobileNetV2: Inverted Residuals and Linear Bottlenecks(MobileNetV2理解)
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了【CV论文笔记】MobileNetV2: Inverted Residuals and Linear Bottlenecks(MobileNetV2理解)相关的知识,希望对你有一定的参考价值。
参考技术A本文主要用于介绍谷歌实验室团队于2018年提出的一种轻型网络MobileNetV2。本笔记主要为方便初学者快速入门,以及自我回顾。
论文链接: http://openaccess.thecvf.com/content_cvpr_2018/papers/Sandler_MobileNetV2_Inverted_Residuals_CVPR_2018_paper.pdf
基本目录如下:
------------------第一菇 - 摘要------------------
在本论文中,我们描述了一种新的网络架构MobileNetV2,该网络在多个视觉基础任务上相比于第一代MobileNets都取得了更好的效果。我们同时还针对目标检测任务,基于我们的MobileNetV2,改进出了一套新的架构,名为SSDLite。同时,对于实例分割任务,我们也在DeepLabv3的基础上进行了改进,提出了Mobile DeepLabv3。
整套MobileNetV2网络架构是基于翻转残差结构的(inverted residual structure),其中依然采用了轻型的深度卷积(depthwise convolutions)来实现滤波操作,同时我们将那些非线性的激活函数给移除了。这一操作带来了不少效果的提升,后文我们也会进行一定的阐述。
最后我们想说,我们的架构能很容易的被迁移应用于其他应用研究。当然,我们也在ImageNet分类,COCO目标检测,VOC图像分割上进行了实验,与其他模型也会进行仔细对比,包括时效性,参数量,准确性等~
------------------第二菇 - 核心思想------------------
不了解MobilesNet第一版的同学,可以先看其第一版的,我自己的个人链接 笔记 也在此献上。
MobileNetsV1版本的想必大家都了解清楚了,但是第一版有一个很奇怪的问题,那就是深度卷积部分的卷积核比较容易训废掉,训废的意思就是发现训练出来的卷积核不少是空的,如下图所示【1】,
而训废的锅,作者认为是ReLU激活函数的锅。。。并且写了好长好长的理论来证明这件事情。。。(很多东西本菇也难以理解。。。只能看看各路大神的想法,这里总结一下)
直接看一张原论文中的图,
上面这张图想表达的意思其实很简单,就是 对低维度做ReLU运算,信息丢失的很多 (如上图,dim=2,3的时候,边界那里直接就没了 ),但是如果是 对高维度做ReLU运算,信息的丢失就会相对减少了 (比如上图,dim=30的时候,边界那里还保留了很多)
因此,这也就解释了卷积核很多是空的现象。因此,作者在第二代中就将ReLU替换成了线性的激活函数。
当然在真实运用时,并不是将所有的激活函数都替换成了线性了(。。。如果真是这样就要报警了🚔),其实只有把最后那个ReLU6给替换成了线性的,如下图所示~
这一块就比较好理解了,其实就是借鉴了残差模块的思想,引入了shortcut结构,但是,这里是inverted!是颠倒残参,那具体的区别是什么呢?
直接贴一张原论文中的图,方便讲解,
首先我们来看一下 残差模块 ,输入首先是经过 卷积进行压缩,然后利用 的卷积进行特征提取,最后再用 的卷积将整个通道数变回去,整个过程就是“降维-卷积-升维”,这样的目的也很简单就是为了减少 模块的计算量,提供整个残差模块的计算效率。
接着我们再来看一下 倒置残差模块 ,输入首先经过 的卷积进行通道扩张,然后使用 的depthwise卷积,最后再用 的卷积将通道数压缩回去,整个过程就是“升维-卷积-降维”,因此整个是与标准的残差模块相反的操作。
这里盗一张网上的图【2】,感觉阐述的很清晰,
而之所以要升维的原因,是因为depthwise本身没有改变通道数的能力,而其在低维度上的表现又比较糟糕,因此,需要升维,从而提高准确率。
至此,本文的2个创新点已经阐述完毕,这里再贴一张V2的block示意图【1】,
当然,少不了要和V1进行对比,这里再盗一张图【2】,
至此,整个MobileNetV2感觉已经说清楚了,具体的网络架构和实验结果,本文就不多做阐述了,论文里都有而且易懂~
------------------第三菇 - 总结------------------
到这里,整篇论文的核心思想已经说清楚了。本论文主要是在MobileNets的基础上又提出了一种轻型的网络架构MobileNetV2,并实验证明了该网络的可行性,为后续发展奠定了基础。
简单总结一下本文就是先罗列了一下该论文的摘要,再具体介绍了一下本文作者的思路,也简单表述了一下,自己对整个MobileNetV2网络架构的理解。希望大家读完本文后能进一步加深对该论文的理解。有说的不对的地方也请大家指出,多多交流,大家一起进步~😁
参考文献:
【1】 https://zhuanlan.zhihu.com/p/70703846
【2】 https://zhuanlan.zhihu.com/p/67872001
轻量级网络论文精度笔记:《Searching for MobileNetV3》
MobileNetV3
论文链接
谷歌在2019年5月在arxiv上公开了MobileNetV3的论文,最近是发表在了ICCV 2019上
论文地址: https://arxiv.org/abs/1905.02244.pdf
项目地址:https://github.com/d-li14/mobilenetv3.pytorch
论文名字
《Searching for MobileNetV3》
参考文献
Andrew Howard, Mark Sandler, Grace Chu, Liang-Chieh Chen, Bo Chen, Mingxing Tan, Weijun Wang, Yukun Zhu, Ruoming Pang, Vijay Vasudevan, Quoc V. Le, Hartwig Adam; Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2019, pp. 1314-1324
1. 研究背景

随着神经网络的发展,高效的神经网络在移动应用中正变得无处不在,从而实现了全新的设备上体验。它们还是个人隐私的关键促成因素,使用户无需将其数据发送到要评估的服务器即可获得神经网络的好处。神经网络效率的提高不仅可以通过更高的准确性和更低的延迟来改善用户体验,还可以通过降低功耗来帮助延长电池寿命。
本文描述了作者的开发MobileNetV3大型和小型模型的方法,以提供下一代高精度高效的神经网络模型来驱动设备上的计算机视觉。新的网络推动了STOA,并展示了如何将自动化搜索与新的体系结构进步结合起来,以构建有效的模型。
本文的目标是开发最佳的移动计算机视觉架构,以优化在移动设备上的精度-延迟之间的权衡。
2. 创新贡献
- 通过互补的搜索技术和新颖的架构设计提出了适用于高/低资源使用场景的 MobileNetV3 神经网络,并在目标检测和语义分割等任务上达到了优秀的性能表现,具有重要的实际意义。
- 提出了新的h-swish激活函数,避免了在量化时造成的数值精度的损失。
- 针对语义分割(或任何密集像素预测)任务,提出了一种新的高效分割解码器 Lite reduce Atrous Spatial Pyramid Pooling(LR-ASPP)。实现了移动端分类,检测和分割的最新SOTA成果。
- 性能表现:MobileNetV3 大模型在 ImageNet 分类任务上比 MobileNetV2 更准确,计算延迟降低 20%;MobileNetV3 精简模型比 MobileNetV2 更准确且延迟相当;MobileNetV3-Large 相对于 MobileNetV2 在 COCO 检测任务上提高 25% 的检测速度,在 Cityscapes 语义分割任务上表现也有所提升。
3. 相关工作
近年来,设计深度神经网络架构以在精度和效率之间实现最佳折衷一直是一个活跃的研究领域。新颖的手工结构和算法神经体系结构搜索在推进该领域方面都发挥了重要作用。
SqueezeNet 广泛使用带有压缩和扩展模块的1x1卷积,主要侧重于减少参数数量。最近的工作将重点从减少参数转移到减少操作数(MAdds)和实际测量的延迟。 MobileNetV1 使用深度可分离卷积来显着提高计算效率。 MobileNetV2 通过引入具有反向残差和线性瓶颈的资源有效块来对此进行扩展。 ShuffleNet 利用组卷积和信道随机操作进一步减少了MAdds。 CondenseNet 在训练阶段学习群卷积,以保持各层之间有用的密集连接,以供特征重用。 ShiftNet 提出了与逐点卷积交错的移位运算,以取代昂贵的空间卷积。
为了使架构设计过程自动化,首先引入了强化学习(RL)来搜索具有竞争力的准确性的高效架构。完全可配置的搜索空间可以成倍增长并且难以处理。因此,架构搜索的早期工作集中在单元级别的结构搜索上,并且同一单元在所有层中都可以重用。最近,探索了一个块级分层搜索空间,该空间允许在网络的不同分辨率块上使用不同的层结构。为了减少搜索的计算成本,在中使用可微体系结构搜索框架进行基于梯度的优化。专注于使现有网络适应受限的移动平台,提出了更有效的自动化网络简化算法。
量化是通过降低精度算法来提高网络效率的另一项重要补充工作。最后,知识蒸馏提供了一种额外的补充方法,可以在大型“教师”网络的指导下生成小型准确的“学生”网络。
3.1 高效移动端构建块
移动端模型通常建立在更多更加高效的构建blocks上。MobileNetV1引入深度可分离卷积作为传统卷积层的高效替换。Depthwise separable convolutions通过将空间滤波与特征生成机制分离,有效地分解了传统卷积计算。Depthwise separable convolutions的定义由两个分开的layer定义:用于空间滤波的轻量深度卷积和用于特征生成计算量高的1 × 1逐点卷积。
MobileNetV2引入了线性bottleneck和inverted-residual结构来构造更加高效的layer结构,利用了此问题的低秩特性。此结构如图3所示,定义为1 × 1扩展卷积接depthwise-convolutions和一个1 × 1projection-layer。

图1
当输入和输出的通道数相同时,由残差连接相连。这种结构在输入和输出处保持了紧凑表示,同时在内部扩展到更高维的特征空间,从而增加了每个通道非线性变换的表达能力。(“发散-集中”的应用)
MnasNet是基于MobileNetV2构建,将基于SE的注意力模块引入到bottleneck结构中,如图2所示。
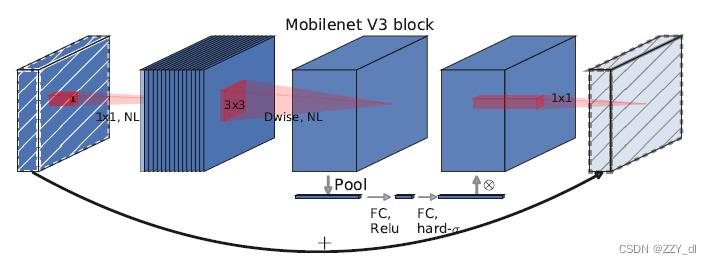
图2
对于MobileNetV3,本文使用这些层的组合作为构建块,以建立最高效的模型。这些层也使用了最新改进的Swish非线性算子。SE模块和Swish非线性算子都使用了Sigmoid函数,而Sigmoid函数计算效率较低,且难以在定点计算模式下保持精度,因此本文将其替换为Hard-Sigmoid函数,这一点将在章节5.2中探讨。
4. 网格搜索
平台感知NAS算法:是一种使用强化学习设计移动端模型的神经网络架构搜索算法。该算法整体流程包括一个基于递归神经网络(RNN)的控制器,一个获取模型精度的训练器及一个用于测量延迟基于手机的推理引擎。
对于MobileNetV3,我们首先使用平台感知NAS算法搜索全局网络架构,接着使用NetAdapt算法搜索每层卷积核个数。这两种算法相互补充,可以结合起来为给定硬件平台优化网络模型。 NAS算法流程图如图3所示。
 图3 NAS算法流程图
图3 NAS算法流程图
首先控制器会根据自身参数θ采样一系列超参𝛼_(1:𝑇) ,采样方法如下图所示,采样输入是来自上一次采样输出的结果。之后,训练器会根据超参生成网络并训练网络得到模型准确率ACC(m),同时模型也会被集成至目标移动平台测量推理延迟LAT(m)。将上述两指标相结合得到强化学习奖励信号:

搜索最佳神经网络架构的过程即最大化期望奖励的过程:

虽然奖励信号R不可微,但可以使用策略梯度去迭代更新θ:

本文使用MnasNet-A1(出自《Tan, M., & Le, Q. (2019). MnasNet: Platform-Aware Neural Architecture Search for Mobile. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (pp. 2820-2828)》)作为初始大移动端模型,结构如图4所示,然后在其之上使用NdetAdapt及其他算法进行优化。MnasNet-A1所使用的的奖励函数并没有针对小移动端模型进行优化。具体来说,MnasNet-A1使用多目标奖励函数ACC(m)×[LAT(m)/TAR]^w来逼近Pareto最优解。我们观察到,小模型的准确率对于延迟更加敏感,因此重新调整了权重系数w=−0.15(MnasNet-A1模型使用w=−0.07),以此来补偿延迟变换对准确率的影响。我们利用改进后的奖励函数进行网络架构搜索,然后使用NetAdapt及其他算法来优化MobileNetV3小模型。

图4 MnasNet-A1网络结构
作者在架构搜索中采用的第二个技术是NetAdapt算法。该算法是对平台感知NAS算法的补充:它对各层而非全局架构进行微调。该算法操作步骤如下:
- 利用平台感知NAS算法搜索种子网络架构。
- 本步骤包括以下三个部分:
- 生成一组建议。每个建议代表对网络架构的某种的修改,这种修改相对于上一个步骤,使模型在网络延迟上至少有δ的降低。
- 我们使用上一个步骤预训练好的模型,根据建议调整网络架构,并适当地截断及随机初始化丢失的权重。对于每个建议,我们使用T步进行模型微调,以此得到粗略的准确率估计。
- 根据某些指标选取最佳建议。
- 重复上一步,直至达到目标延迟。
对于本文实验,我们使用T = 10000 及δ = 0.1 |L|作为参数,其中L是种子模型的延迟。
5. 网络的改进
除网络搜索外,我们也引入了几种新组建用以优化最终模型。我们重新设计了网络输入输出中消耗运算资源较多的层。另外,我们也引入了新的非线性函数h−swish,它是swish的改进版,运算速度更快且对量化更友好。
5.1 重新设计计算复杂层
该方法的主要思路是将一些计算昂贵的层替换为更轻量级的替代层或者删减掉某些层,以降低模型的计算代价和模型大小。

图5 修改模块对比
作者首先改进了网络输出最后几层的结构。架构搜索的模型是基于MobileNetV2的倒瓶颈块及其变种组建,在最后一层使用了1×1卷积进行特征空间维度扩展。这一层用于丰富特征,对于模型预测至关重要,同时,它也会带来额外的延迟。
为了在减少延迟的同时保留高维度特征,我们将该层移动到平均池化层之外。最终,维度扩展是在1×1而非7×7的分辨率上进行。这样的设计与原始结构相比,特征扩展几乎不消耗运算资源及造成延迟。
通过Efficient Last Stage模块的设计使得模型在不损失精度的情况下,在网络的末端减少了三个计算复杂的层,极大的减少了计算量。具体来说,一旦降低了特征扩展的运算成本,那么之前瓶颈结构中的用于降低运算量的投影层也不再被需要。我们将上一个瓶颈结构的投影及滤波层同时移除,这样可以更进一步地降低运算复杂度。原始及优化后的结构如图5所示。优化后的模型,其延迟减少了7ms,大约是运行时间的11%,同时也减少了3000万次乘加操作,并且几乎没有损失准确率。详细结果见第6节。
另一个消耗运算资源较多的层是网络输入层。当前移动端模型的输入层倾向于使用32个3×3的全卷积滤波器进行图像边缘检测。我们实验了减少滤波器数目及使用不同非线性函数对模型的影响。最终,我们选择hard swish函数作为非线性函数,它与其他非线性函数具有同样优秀的性能。同时我们也发现,不管使用ReLU还是swish,在输入层使用16个滤波器与使用32个滤波器相同的准确率。这样可以减少2ms延迟及1000万次乘加操作。
5.2 设计Hard-Swish
swish作为ReLU的替代品可以显著地提高神经网络的准确率。该非线性函数定义如下:

尽管提高了准确率,但是在移动设备上运算sigmoid函数却需要消耗很多的运算资源。我们有两种方式来处理这个问题。
第一种:使用ReLU(x+3)/6来代替sigmoid
第二种:由于分辨率逐层减小,网络层次越深,非线性函数的运算资源消耗越低。我们实验发现,仅在更深的网络层中使用swish函数即可实现其大部分收益。因此,我们仅在模型的后半段使用h−swish函数。
 图6 Sigmoid和swish非线性和它的变体对比情况
图6 Sigmoid和swish非线性和它的变体对比情况
5.3 Large squeeze-and-excite
我们将瓶颈结构中压缩及激发的尺寸固定为扩展层通道数的1/4。这样做可以在不增加参数量的情况下提高准确率,并且几乎不会增加网络延迟。
5.4 MobileNetV3 Definitions
MobileNetV3有两种定义版本:MobileNetV3-Large及MobileNetV3-Small。这两种模型分别针对高资源及低资源的应用而设计。模型通过平台感知NAS算法及NetAdapt算法搜索而来并且结合了本节中所提出的改进方法。具体网络完整规格请参见表2和表3。
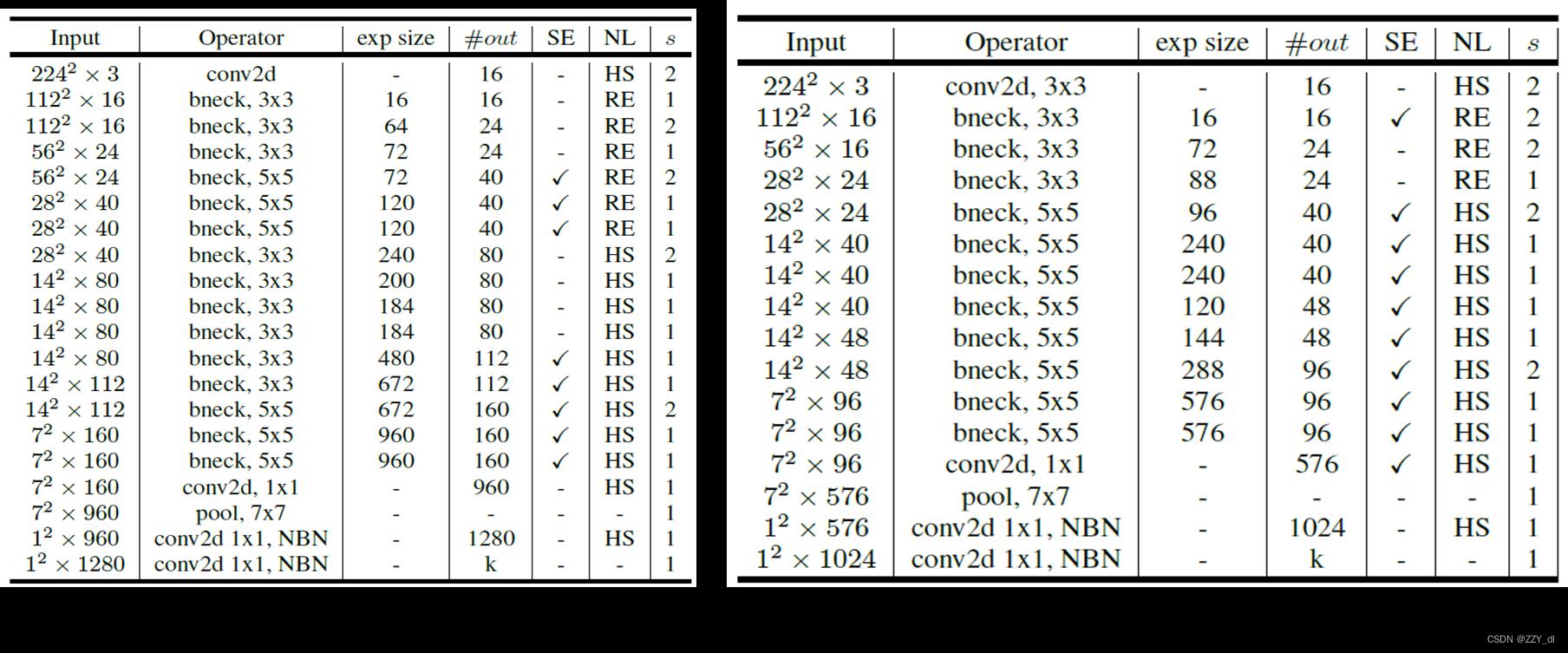 其中SE表示该块中是否存在挤压-激发。NL表示所使用的非线性类型。其中HS表示h-swish, RE表示ReLU。NBN表示没有批归一化。S表示步幅。exp size升维维数
其中SE表示该块中是否存在挤压-激发。NL表示所使用的非线性类型。其中HS表示h-swish, RE表示ReLU。NBN表示没有批归一化。S表示步幅。exp size升维维数
6.仿真分析
我们的实验结果证明了MobileNetV3的高效性。我们报告了有关分类,检测和分割任务的实验结果。同时也进行了控制变量分析,以研究不同设计决策对模型测试结果的影响。
6.1 分类
我们以ImageNet数据集为分类实验标准,比较了各种模型的准确率及资源消耗(例如延迟和乘加操作)。
6.1.1 训练设置
我们在4×4 TPU Pod上利用tensorflow框架同步训练模型,采用的优化器为0.9动量的RMSProp。我们使用的初始学习速率为0.1,批大小为4096(每个芯片处理128张图片),学习速率每3个epcho会减小0.01。我们也使用0.8比例的dropout并且在损失函数中加入了1e−5比例的l2正则化,然后采用Inception中相同的图像预处理方法。最后,我们对权重使用衰减系数为0.9999的指数滑动平均。所有的卷积层都使用了平均衰减系数为0.99的批标准化。
TPU Pod:是一组运行在谷歌数据中心中的服务器机架,每个机架都配备了谷歌的Tensor处理器单元(TPU)。
6.1.2 测量设置
我们在谷歌Pixel手机上,利用TFLite基准工具进行模型延迟测量。因为我们发现多核网络推理对于移动应用来说并不太实用,所以所有的测量都是在单线程大核中进行的。
6.2 仿真分析
6.2.1 仿真分析一

在表4中,作者分别对比了各个模型在不同Pixel系列手机上的浮点性能及量化性能。1.0为尺度因子,类似shfflenet,在0.5-1.0之间。Madds代表每百万次加法运算。P-1是对应的延迟。所有的延迟时间以毫秒计,并且使用单个大核心和批处理大小为一来进行测量。
6.2.2 仿真分析二

作者对比了各个模型在不同Pixel系列手机上的量化性能。所有的延迟都以毫秒为单位。推理延迟是使用相应的Pixel 1/2/3设备上的单个大核心进行测量的。
6.2.3 仿真分析三

在图7中,我们展示了MobileNetV3在不同乘数和分辨率下的性能权衡。注意到MobileNetV3-Small在乘数调整到几乎相同性能时比MobileNetV3-Large表现更好,性能提升近3%。另一方面,分辨率比乘数提供了更好的权衡。然而,需要注意的是,分辨率通常由问题所确定(例如,分割和检测问题通常需要更高的分辨率),因此不能总是用作可调参数。
6.2.4 仿真分析四

在h-swish@N中,N表示第一层启用h-swish的通道数。No-opt是指没有使用任何优化技术或加速方法。只使用了最基本的计算方式来计算卷积和非线性函数。这些优化技术可能包括降低数据精度、使用分组卷积、深度可分离卷积、使用线性瓶颈以及使用h-swish等。我们研究了h−swish函数在模型中的插入位置及优化实现方式对准确率和延迟的影响,结果表6所示,h−swish@N表示从通道数为N的层开始使用h−swish作为激活函数的MobileNetV3-Large 1.0模型。从表中我们可以看到,优化h−swish函数后,模型延迟降低了6ms(超过10%的运行时间)。优化h−swish函数的模型仅比传统ReLU函数的模型慢3ms。
6.2.5 仿真分析五
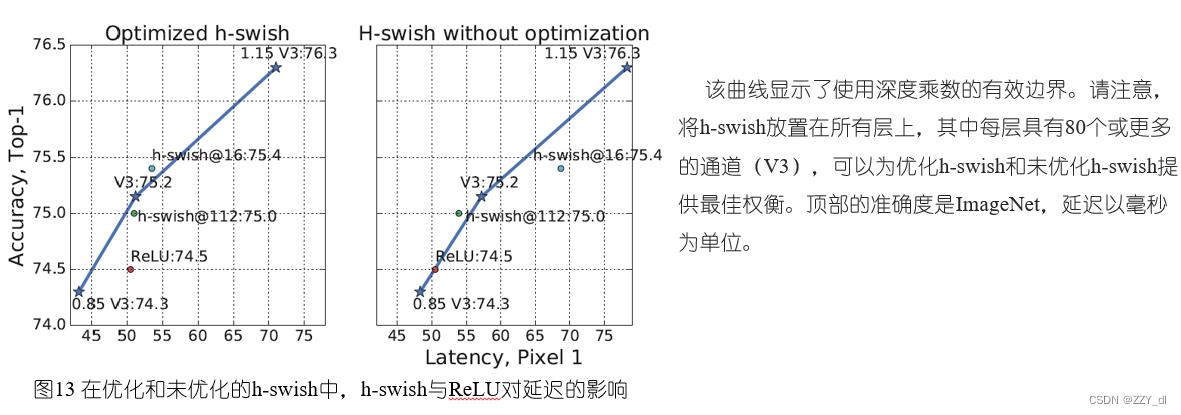
图13展示了基于非线性函数的选择和网络宽度所形成的有效边界。MobileNetV3在网络的中间层使用h-swish,并且明显优于ReLU。有趣的是,将h-swish添加到整个网络中都会稍稍优于插值的边界来扩展网络。
6.2.6 仿真分析六

在图14中展示了不同组件的引入如何沿着延迟/准确性曲线移动。
Compact相当于通过很多轻量级方法的汇总融合成一个轻量化网络,比如说将1×1卷积和3×3深度可分离卷积结合使用,或者使用一些本文设计的Efficient last stage等方法。所有的方法导致了V3优异的性能。
6.2.7 仿真分析七

我们使用MobileNetV3替代SSDLite中的主干特征提取器(VGG16),并在COCO数据集上与其他主干网络的SSDLite进行了比较。
+代表了在C4和C5之间的块中的通道数量减少了2倍,这是因为MobileNetV3的后几层是为1000种类别ImageNet数据集而设计,这对于90种类别的COCO数据集来说是冗余的。对于MobileNetV3-Large,C4是第13个瓶颈块的扩展层。对于MobileNetV3-Small,C4是第9个瓶颈块的扩展层。对于这两个网络,C5是紧接着池化层之前的层。
在COCO测试集上的结果在表7中给出。随着通道减少,MobileNetV3-Large比MobileNetV2快27%,mAP近乎相同。通过通道缩减,MobileNetV3-Small的mAP比MobileNetV2和MnasNet分别提高了2.4和0.5,同时比它们快35%。对于两个MobileNetV3模型,通道减少技巧导致延迟减少约15%,没有mAP损失,这表明Imagenet分类和COCO目标检测可能更喜欢不同的特征提取器形状。
6.2.8 仿真分析八
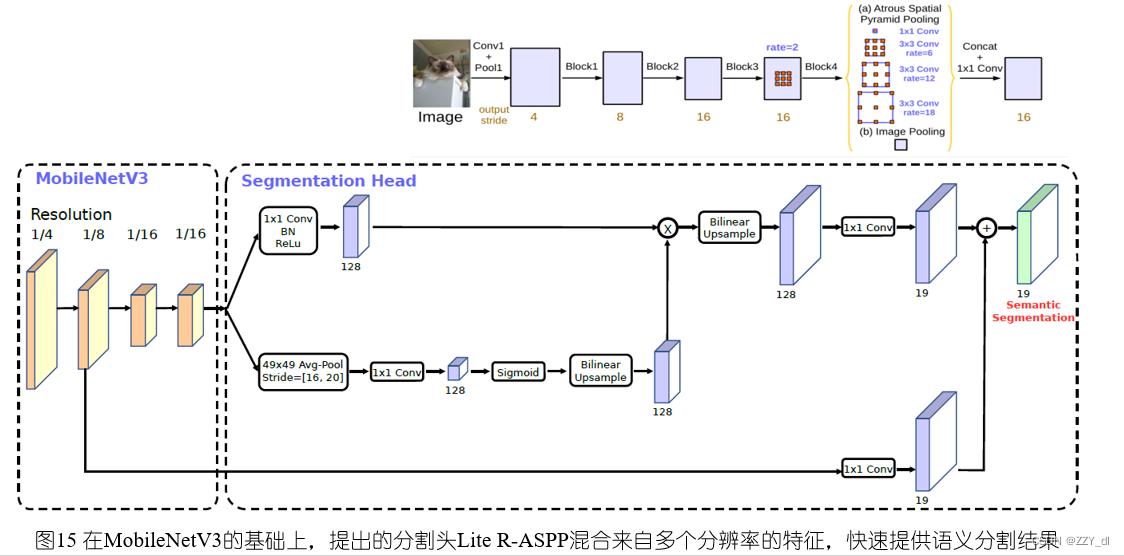
我们对比使用MobileNetV2及MobileNetV3作为主干网络的移动端语义分割模型。此外,我们还比较了两种分割头。第一种被称为R-ASPP,是ASPP的简化设计,仅包含1×1卷积及全局平均池化两个分支。在本文中,我们提出了另一种轻量级分割头,被称为Lite R-ASPP(或LR-ASPP),如下图所示。Lite R-ASPP是对R-ASPP的改进,它在全局平均池化分支中添加了类似压缩及激励的模块。我们在MobileNetV3的最后一个构建块中使用空洞卷积来提取更稠密的特征,并且在低级特征中添加跳接连线来捕获更详细的信息。
6.2.9 仿真分析九

在Cityscapes验证集上进行的语义分割结果。 RF2:将最后一个块中的过滤器数量减少一半。V2 0.5和V2 0.35分别是深度系数为0.5和0.35的MobileNetV2。SH:分割头部,其中采用R-ASPP,而X采用了提出的LR-ASPP。F:分割头部使用的过滤器数量。CPU(f):相对于完整分辨率输入(即1024×2048),在Pixel 3的单个大核心上测量的CPU时间(浮点数)。CPU(h):相对于一半分辨率输入(即512×1024)测量的CPU时间。第8行和第11行是我们的MobileNetV3分割候选项。
我们在表8中报告了Cityscapes的验证集结果。如表所示,我们观察到(1)将网络骨干最后一个块的通道数减少2倍可以显著提高速度,同时保持类似的性能(行1与行2,行5与行6),(2)提出的分割头LR-ASPP比R-ASPP略快,但性能提高了(行2与行3,行6与行7),(3)将分割头中的滤波器从256减少到128可以提高速度,但代价是略劣的性能(行3与行4,行7与行8),(4)在相同的设置时,MobileNetV3模型变体实现类似的性能,而比MobileNetV2略快(行1与行5,行2与行6,行3与行7,行4与行8),(5)MobileNetV3-Small实现了与MobileNetV2-0.5类似的性能,但更快,(6)MobileNetV3-Small比MobileNetV2-0.35显著更好,并带来类似的速度。
6.2.10 仿真分析十

OS:输出步幅,即输入图像空间分辨率与骨干输出分辨率的比率。当OS = 16时,在骨干的最后一个块中应用扩张卷积。当OS = 32时,不使用扩张卷积。MAdds(f):以全分辨率输入(即1024×2048)为参考,测量乘法-加法运算的数量。MAdds(h):以半分辨率输入(即512×1024)为参考,测量乘法-加法运算的数量。CPU(f):使用Pixel 3的单个大型核心(浮点)测量与全分辨率输入(即1024×2048)相关的CPU时间。CPU(h):与半分辨率输入(即512×1024)相关的CPU时间。ESPNet [31、32]和CCC2 [34]采用半分辨率输入,而我们的模型直接使用全分辨率输入。
表9显示了我们在Cityscapes测试集上的结果。我们的MobileNetV3作为网络骨干的分割模型在MAdds方面更快,比ESPNetv2,CCC2 和ESPNetv1 分别优于6.4%,10.6%和12.3%。当不使用扩张卷积来提取MobileNetV3最后一个块中的密集特征映射时,性能略有下降0.6%,但速度提高到1.98B(对于半分辨率输入),比ESPNetv2,CCC2和ESPNetv1分别快1.36,1.59和2.27倍。此外,我们的MobileNetV3-Small作为网络骨干的模型仍然优于它们所有,至少优于2.1%。
7.论文总结
本文介绍了MobileNetV3大型和小型模型,展示了移动分类、检测和分割的新的技术水平。本文描述了利用多种网络架构搜索算法以及网络设计的先进技术,实现下一代移动模型的交付。还展示了如何以量化友好且高效的方式调整swish等非线性,并应用挤压和激励,将它们引入移动模型域作为有效工具。本文还介绍了一种新型的轻量级分割解码器,称为LR-ASPP。虽然如何将自动搜索技术与人类直觉最好地融合仍是一个未解决的问题,但作者展示这些积极的初步结果,并将继续完善这些方法作为未来的工作,这是一个非常经典且值得借鉴的论文和工作。
以上是关于【CV论文笔记】MobileNetV2: Inverted Residuals and Linear Bottlenecks(MobileNetV2理解)的主要内容,如果未能解决你的问题,请参考以下文章
CV开山之作:《AlexNet》深度学习图像分类经典论文总结学习笔记(原文+总结)