BetaFlight深入传感设计之四:GPS传感模块
Posted lida2003
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了BetaFlight深入传感设计之四:GPS传感模块相关的知识,希望对你有一定的参考价值。
BetaFlight深入传感设计之四:GPS传感模块
GPS主要根据天空卫星信号来计算当前空间三位坐标位置,而其复杂内部运算逻辑以及保密性,都被封装到GPS模块中,对外提供串行接口,通常提供以下协议:
因此,其硬件规格不像gyro/mag/baro等具体到硬件,更多是协议层面的支持。
根据BetaFlight深入传感设计:传感模块设计框架,我们针对如下几个阶段进行分析。
1. HwPreInit/HwInit阶段
1.1 【业务HwPreInit】gpsInit
GPS模块采用串口通信,因此该部分主要根据配置情况,初始化串口,并将GPS的状态机标记正确的位置GPS_STATE_INITIALIZING。
main
└──> init
└──> gpsInit
gpsInit
├──> [gpsData/gpsPacketLog结构体初始化]
├──> gpsSetState(GPS_STATE_UNKNOWN)
├──> <gpsConfig()->provider == GPS_MSP> // no serial ports used when GPS_MSP is configured
│ ├──> gpsSetState(GPS_STATE_INITIALIZED)
│ └──> return
├──> const serialPortConfig_t *gpsPortConfig = findSerialPortConfig(FUNCTION_GPS);
├──> <!gpsPortConfig>
│ └──> return // 是否有外接GPS传感设备,如果没有则无相关应用
├──> <while (gpsInitData[gpsData.baudrateIndex].baudrateIndex != gpsPortConfig->gps_baudrateIndex>
│ ├──> gpsData.baudrateIndex++
│ └──> <gpsData.baudrateIndex >= GPS_INIT_DATA_ENTRY_COUNT>
│ ├──> gpsData.baudrateIndex = DEFAULT_BAUD_RATE_INDEX
│ └──> break
├──> portMode_e mode = MODE_RXTX
├──> <defined(GPS_NMEA_TX_ONLY)>
│ └──> <gpsConfig()->provider == GPS_NMEA>
│ └──> mode &= ~MODE_TX
├──> gpsPort = openSerialPort(gpsPortConfig->identifier, FUNCTION_GPS, NULL, NULL, baudRates[gpsInitData[gpsData.baudrateIndex].baudrateIndex], mode, SERIAL_NOT_INVERTED)
├──> <!gpsPort>
│ └──> return
└──> gpsSetState(GPS_STATE_INITIALIZING); // signal GPS "thread" to initialize when it gets to it
1.2 【业务HwInit】gpsInitHardware
对硬件模块配置的通信协议,进行初始化:
- NMEA
- UBLox
注:传感模块协议初始化检查在gpsUpdate例程中的GPS_STATE_INITIALIZING/GPS_STATE_CHANGE_BAUD/GPS_STATE_CONFIGURE状态是调用。
gpsInitHardware
└──> switch (gpsConfig()->provider)
├──> case GPS_NMEA:
│ ├──> gpsInitNmea()
│ └──> break
└──> case GPS_UBLOX:
├──> gpsInitUblox()
└──> break
2. HwIo阶段
该阶段主要是间歇性读取并解析串行数据。
- 【数据接收】gpsNewData //串行数据一个一个字节输入,在协议面会进行状态机处理
- 【协议解析】gpsNewFrame
【NMEA】gpsNewFrameNMEA
【UBLOX】gpsNewFrameUBLOX
- 【数据处理】onGpsNewData
gpsUpdate
├──> <GPS data received via MSP>
│ ├──> gpsSetState(GPS_STATE_RECEIVING_DATA)
│ └──> onGpsNewData()
├──> <GPS data received via Serial port, NMEA or UBlox>
│ ├──> <while (serialRxBytesWaiting(gpsPort))>
│ │ ├──> <cmpTimeUs(micros(), currentTimeUs) > GPS_MAX_WAIT_DATA_RX)>
│ │ │ ├──> rescheduleTask(TASK_SELF, TASK_PERIOD_HZ(TASK_GPS_RATE_FAST)) // Wait 1ms and come back (1000Hz)
│ │ │ └──> return
│ │ └──> gpsNewData(serialRead(gpsPort))
│ └──> rescheduleTask(TASK_SELF, TASK_PERIOD_HZ(TASK_GPS_RATE)) // Restore default task rate(100Hz)
├──> [GPS 状态机]
│ ├──> <GPS_STATE_UNKNOWN><GPS_STATE_INITIALIZED>
│ │ └──> // do nothing, currently
│ ├──> <GPS_STATE_INITIALIZING><GPS_STATE_CHANGE_BAUD><GPS_STATE_CONFIGURE>
│ │ └──> gpsInitHardware()
│ ├──> <GPS_STATE_LOST_COMMUNICATION>
│ │ ├──> gpsData.timeouts++
│ │ ├──> <gpsConfig()->autoBaud>
│ │ │ ├──> gpsData.baudrateIndex++ // try another rate
│ │ │ └──> gpsData.baudrateIndex %= GPS_INIT_ENTRIES
│ │ ├──> gpsSol.numSat = 0
│ │ ├──> DISABLE_STATE(GPS_FIX)
│ │ └──> gpsSetState(GPS_STATE_INITIALIZING)
│ └──> <GPS_STATE_RECEIVING_DATA> // check for no data/gps timeout/cable disconnection etc
│ ├──> <millis() - gpsData.lastMessage > GPS_TIMEOUT>
│ │ └──> gpsSetState(GPS_STATE_LOST_COMMUNICATION)
│ └──> <USE_GPS_UBLOX><gpsConfig()->autoConfig == GPS_AUTOCONFIG_ON>
│ ├──> <gpsData.state_position:0>
│ │ └──> <!isConfiguratorConnected()>
│ │ ├──> <gpsData.ubloxUseSAT>
│ │ │ └──> ubloxSetMessageRate(CLASS_NAV, MSG_SAT, 0) // disable SAT MSG
│ │ ├──> <else>
│ │ │ └──> ubloxSetMessageRate(CLASS_NAV, MSG_SVINFO, 0) // disable SVINFO MSG
│ │ └──> gpsData.state_position = 1
│ ├──> <gpsData.state_position:1>
│ │ ├──> <STATE(GPS_FIX) && (gpsConfig()->gps_ublox_mode == UBLOX_DYNAMIC)>
│ │ │ ├──> ubloxSendNAV5Message(true)
│ │ │ └──> gpsData.state_position = 2
│ │ └──> <isConfiguratorConnected()>
│ │ └──> gpsData.state_position = 2
│ └──> <gpsData.state_position:2>
│ └──> <isConfiguratorConnected()>
│ ├──> <gpsData.ubloxUseSAT>
│ │ └──> ubloxSetMessageRate(CLASS_NAV, MSG_SAT, 5) // set SAT MSG rate (every 5 cycles)
│ ├──> <else>
│ │ └──> ubloxSetMessageRate(CLASS_NAV, MSG_SVINFO, 5) // set SVINFO MSG rate (every 5 cycles)
│ └──> gpsData.state_position = 0
├──> executeTimeUs = micros() - currentTimeUs
├──> <executeTimeUs > gpsStateDurationUs[gpsCurrentState]>
│ └──> gpsStateDurationUs[gpsCurrentState] = executeTimeUs
├──> schedulerSetNextStateTime(gpsStateDurationUs[gpsData.state])
├──> <sensors(SENSOR_GPS)>
│ └──> updateGpsIndicator(currentTimeUs)
├──> <!ARMING_FLAG(ARMED) && !gpsConfig()->gps_set_home_point_once>
│ └──> DISABLE_STATE(GPS_FIX_HOME)
├──> uint8_t minSats = 5
├──> <defined(USE_GPS_RESCUE)><gpsRescueIsConfigured()>
│ ├──> updateGPSRescueState()
│ └──> minSats = gpsRescueConfig()->minSats
├──> static bool hasFix = false
├──> <STATE(GPS_FIX)><gpsIsHealthy() && gpsSol.numSat >= minSats && !hasFix> // ready beep sequence on fix or requirements for gps rescue met.
│ ├──> beeper(BEEPER_READY_BEEP)
│ └──> hasFix = true
└──> <else>
└──> hasFix = false
3. HwDataAnalysis阶段
3.1 gpsNewFrame
目前GPS串行数据解析支持NMEA和UBLox两种帧格式,从协议的效率角度看UBLox的UBX协议会更加高效和精简。
注:目前BetaFlight固件推荐的也是UBLox协议配置。
3.1.1 【NMEA】gpsNewFrameNMEA
NMEA主要解析三种数据帧:
- GPGGA //GPS定位信息,经纬度
- GPRMC //推荐最小定位信息, 3d速度,方向角
- GPGSV //可见卫星信息
gpsNewFrameNMEA
├──> [Frame Head checking]
│ ├──> [GPGGA FRAME parsing]
│ ├──> [GPRMC FRAME parsing]
│ └──> [GPGSV FRAME parsing]
└──> [checksum check and data applying]
注:记得刚毕业参加工作那会儿就自己根据NMEA写过一个解析函数,所以这块相对熟悉。后面给出字符串的例子。
例: G P G G A , 092204.999 , 4250.5589 , S , 14718.5084 , E , 1 , 04 , 24.4 , 19.7 , M , , , , 0000 ∗ 1 F 字段 0 : GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F 字段0: GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000∗1F字段0:GPGGA,语句ID,表明该语句为Global Positioning System Fix Data(GGA)GPS定位信息
字段1:UTC 时间,hhmmss.sss,时分秒格式
字段2:纬度ddmm.mmmm,度分格式(前导位数不足则补0)
字段3:纬度N(北纬)或S(南纬)
字段4:经度dddmm.mmmm,度分格式(前导位数不足则补0)
字段5:经度E(东经)或W(西经)
字段6:GPS状态,0=未定位,1=非差分定位,2=差分定位,3=无效PPS,6=正在估算
字段7:正在使用的卫星数量(00 - 12)(前导位数不足则补0)
字段8:HDOP水平精度因子(0.5 - 99.9)
字段9:海拔高度(-9999.9 - 99999.9)
字段10:地球椭球面相对大地水准面的高度
字段11:差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)
字段12:差分站ID号0000 - 1023(前导位数不足则补0,如果不是差分定位将为空)
字段13:校验值
例: G P R M C , 024813.640 , A , 3158.4608 , N , 11848.3737 , E , 10.05 , 324.27 , 150706 , , , A ∗ 50 字段 0 : GPRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,150706,,,A*50 字段0: GPRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,150706,,,A∗50字段0:GPRMC,语句ID,表明该语句为Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐最小定位信息
字段1:UTC时间,hhmmss.sss格式
字段2:状态,A=定位,V=未定位
字段3:纬度ddmm.mmmm,度分格式(前导位数不足则补0)
字段4:纬度N(北纬)或S(南纬)
字段5:经度dddmm.mmmm,度分格式(前导位数不足则补0)
字段6:经度E(东经)或W(西经)
字段7:速度,节,Knots
字段8:方位角,度
字段9:UTC日期,DDMMYY格式
字段10:磁偏角,(000 - 180)度(前导位数不足则补0)
字段11:磁偏角方向,E=东W=西
字段16:校验值
例: G P G S V , 3 , 1 , 10 , 20 , 78 , 331 , 45 , 01 , 59 , 235 , 47 , 22 , 41 , 069 , , 13 , 32 , 252 , 45 ∗ 70 字段 0 : GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70 字段0: GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45∗70字段0:GPGSV,语句ID,表明该语句为GPS Satellites in View(GSV)可见卫星信息
字段1:本次GSV语句的总数目(1 - 3)
字段2:本条GSV语句是本次GSV语句的第几条(1 - 3)
字段3:当前可见卫星总数(00 - 12)(前导位数不足则补0)
字段4:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)
字段5:卫星仰角(00 - 90)度(前导位数不足则补0)
字段6:卫星方位角(00 - 359)度(前导位数不足则补0)
字段7:信噪比(00-99)dbHz
字段8:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)
字段9:卫星仰角(00 - 90)度(前导位数不足则补0)
字段10:卫星方位角(00 - 359)度(前导位数不足则补0)
字段11:信噪比(00-99)dbHz
字段12:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)
字段13:卫星仰角(00 - 90)度(前导位数不足则补0)
字段14:卫星方位角(00 - 359)度(前导位数不足则补0)
字段15:信噪比(00-99)dbHz
字段16:校验值
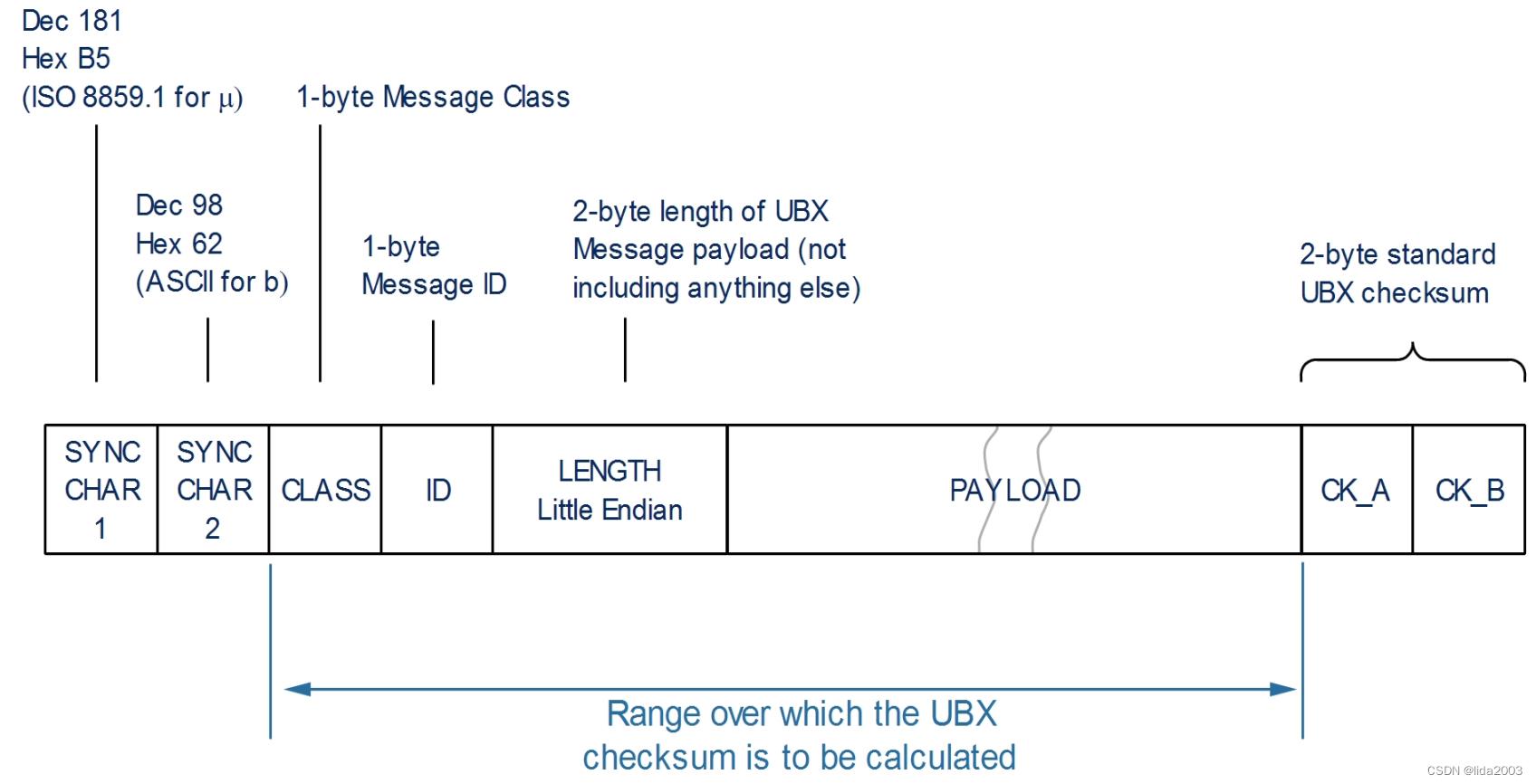
3.1.2 【UBLOX】gpsNewFrameUBLOX
UBLox主要解析部分消息类型,如下所示:
- UBX-ACK (0x05)消息
ACK_ACK //UBX-ACK-ACK (0x05 0x01), Message acknowledged
ACK_NACK //UBX-ACK-NAK (0x05 0x00), Message not acknowledged
- UBX-NAV (0x01)消息
POSLLH //UBX-NAV-POSLLH (0x01 0x02), Geodetic position solution
STATUS //UBX-NAV-STATUS (0x01 0x03), Receiver navigation status
SOL //UBX-NAV-SOL (0x01 0x06), Navigation solution information
VELNED //UBX-NAV-VELNED (0x01 0x12), Velocity solution in NED frame
PVT //UBX-NAV-PVT (0x01 0x07), Navigation position velocity time solution
SVINFO //UBX-NAV-SVINFO (0x01 0x30), Space vehicle information
SAT //NAV-SAT, Satellite information
- 配置类消息
CFG_GNSS //GNSS system configuration
gpsNewFrameUBLOX
├──> [UBLOX Protocl Frame check]
└──> UBLOX_parse_gps
├──> <MSG_POSLLH>
├──> <MSG_STATUS>
├──> <MSG_SOL>
├──> <MSG_VELNED>
├──> <MSG_PVT>
├──> <MSG_SVINFO>
├──> <MSG_SAT>
├──> <MSG_CFG_GNSS>
├──> <MSG_ACK_ACK>
└──> <MSG_ACK_NACK>
3.2 onGpsNewData
当获取到最新数据是,计算如下业务数据:
- 离开起飞点的距离
- 更新飞行速度和方向
- 标记新GPS数据,提示Resucre例程
onGpsNewData
├──> <!(STATE(GPS_FIX) && gpsSol.numSat >= 5)>
│ └──> return;
├──> [Calculate time delta for navigation loop, range 0-1.0f, in seconds]
│ ├──> static uint32_t nav_loopTimer;
│ ├──> dTnav = (float)(millis() - nav_loopTimer) / 1000.0f;
│ ├──> nav_loopTimer = millis();
│ └──> dTnav = MIN(dTnav, 1.0f); // prevent runup from bad GPS
├──> GPS_calculateDistanceAndDirectionToHome();
├──> <ARMING_FLAG(ARMED)>
│ └──> GPS_calculateDistanceFlownVerticalSpeed(false);
└──> <USE_GPS_RESCUE>
└──> rescueNewGpsData();
3.3 GPS_calculateDistanceAndDirectionToHome
计算水平方向距离起飞点距离,不考虑高度。
void GPS_calculateDistanceAndDirectionToHome(void)
if (STATE(GPS_FIX_HOME)) // If we don't have home set, do not display anything
uint32_t dist;
int32_t dir;
GPS_distance_cm_bearing(&gpsSol.llh.lat, &gpsSol.llh.lon, &GPS_home[GPS_LATITUDE], &GPS_home[GPS_LONGITUDE], &dist, &dir);
GPS_distanceToHome = dist / 100;
GPS_directionToHome = dir / 100;
else
GPS_distanceToHome = 0;
GPS_directionToHome = 0;
#define DISTANCE_BETWEEN_TWO_LONGITUDE_POINTS_AT_EQUATOR_IN_HUNDREDS_OF_KILOMETERS 1.113195f
#define TAN_89_99_DEGREES 5729.57795f
// Get distance between two points in cm
// Get bearing from pos1 to pos2, returns an 1deg = 100 precision
void GPS_distance_cm_bearing(int32_t *currentLat1, int32_t *currentLon1, int32_t *destinationLat2, int32_t *destinationLon2, uint32_t *dist, int32_t *bearing)
float dLat = *destinationLat2 - *currentLat1; // difference of latitude in 1/10 000 000 degrees
float dLon = (float)(*destinationLon2 - *currentLon1) * GPS_scaleLonDown;
*dist = sqrtf(sq(dLat) + sq(dLon)) * DISTANCE_BETWEEN_TWO_LONGITUDE_POINTS_AT_EQUATOR_IN_HUNDREDS_OF_KILOMETERS;
*bearing = 9000.0f + atan2_approx(-dLat, dLon) * TAN_89_99_DEGREES; // Convert the output radians to 100xdeg
if (*bearing < 0)
*bearing += 36000;
3.4 GPS_calculateDistanceFlownVerticalSpeed
计算飞行速度和方向。
static void GPS_calculateDistanceFlownVerticalSpeed(bool initialize)
static int32_t lastCoord[2] = 0, 0 ;
static int32_t lastAlt;
static int32_t lastMillis;
int currentMillis = millis();
if (initialize)
GPS_distanceFlownInCm = 0;
GPS_verticalSpeedInCmS = 0;
else
if (STATE(GPS_FIX_HOME) && ARMING_FLAG(ARMED))
uint16_t speed = gpsConfig()->gps_use_3d_speed ? gpsSol.speed3d : gpsSol.groundSpeed;
// Only add up movement when speed is faster than minimum threshold
if (speed > GPS_DISTANCE_FLOWN_MIN_SPEED_THRESHOLD_CM_S)
uint32_t dist;
int32_t dir;
GPS_distance_cm_bearing(&gpsSol.llh.lat, &gpsSol.llh.lon, &lastCoord[GPS_LATITUDE], &lastCoord[GPS_LONGITUDE], &dist, &dir);
if (gpsConfig()->gps_use_3d_speed)
dist = sqrtf(powf(gpsSol.llh.altCm - lastAlt, 2.0f) + powf(dist, 2.0f));
GPS_distanceFlownInCm += dist;
GPS_verticalSpeedInCmS = (gpsSol.llh.altCm - lastAlt) * 1000 / (currentMillis - lastMillis);
GPS_verticalSpeedInCmS = constrain(GPS_verticalSpeedInCmS, -1500, 1500);
lastCoord[GPS_LONGITUDE] = gpsSol.llh.lon;
lastCoord[GPS_LATITUDE] = gpsSol.llh.lat;
lastAlt = gpsSol.llh.altCm;
lastMillis = currentMillis;
3.5 rescueNewGpsData
/*
If we have new GPS data, update home heading
if possible and applicable.
*/
void rescueNewGpsData(void)
newGPSData = true;
4. 总结
GPS传感器通过NMEA和UBLox协议解析获取数据,其业务飞行器速度,飞行方向,以及距离起飞点水平距离和方向角的计算都容易理解,且不复杂。
5. 参考资料
【1】BetaFlight深入传感设计:传感模块设计框架
【2】BetaFlight模块设计之八:GPS任务分析
【3】Wiki, NMEA_0183
【4】u-blox8-M8-ReceiverDescrProtSpec-UBX-13003221
以上是关于BetaFlight深入传感设计之四:GPS传感模块的主要内容,如果未能解决你的问题,请参考以下文章