(翻)为什么要训练人工神经网络
Posted PacosonSWJTU
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了(翻)为什么要训练人工神经网络相关的知识,希望对你有一定的参考价值。
【README】
本文翻译自
 https://towardsdatascience.com/how-do-we-train-neural-networks-edd985562b73
https://towardsdatascience.com/how-do-we-train-neural-networks-edd985562b73【1】介绍
今天我将从非常简短的神经网络介绍开始,这足以理解我将要讨论的概念。 我将解释什么是损失函数以及“训练”神经网络或任何其他机器学习模型意味着什么。 我并不声称我的解释是对神经网络的完整、深入的介绍,事实上,希望您已经熟悉这些概念。 如果您想更好地了解神经网络中发生的事情,我会在文章末尾提供一个资源列表供您学习。
我将解释几年前在 kaggle 上运行的狗对猫比赛的例子。 在比赛中,我们面临的任务是识别给定图像上出现的是狗还是猫。
【2】定义神经网络
人工神经网络 (ANN) 的灵感来自于你大脑中实际发生的事情。 虽然这些类比非常松散,但人工神经网络与其生物学上的“父母”有几个相似之处。 它们由一定数量的神经元组成。 因此,让我们看一下单个神经元。
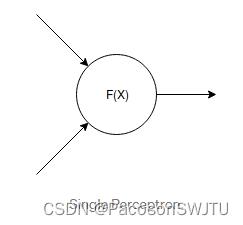
【图1】 神经元
我们将考虑弗兰克·罗森布拉特在 1957 年提出的最简单的神经元模型的稍微修改版本,称为“感知器”。 我所做的所有修改都是为了简单起见,因为我不会深入解释神经网络。 我只是想让你直观地了解正在发生的事情。
【2.1】什么是神经元?
它是一个数学函数。 它需要几个数字作为输入(任意数量)。 我上面画的神经元需要两个数字作为输入。 我们将每个输入数字表示为 xₖ,其中 k 代表输入索引。 对于每个输入 xₖ,神经元分配另一个数字 wₖ。 由这些数字组成的向量 wₖ 称为权重向量。 这些权重使每个神经元都独一无二。 它们在测试期间是固定的,但在训练期间,我们将更改这些数字以“调整”我们的网络(修改权值)。 我会在后面的帖子中谈到它。 正如我上面所说,
1)定义:神经元是一个函数,是权重和输入的线性组合,在其上带有某种非线性函数;神经元就包括了 线性与非线性部分了 ;
【2.2】线性部分
【公式1】 权值与输入数据的线性组合
上面的公式就是我所说的线性组合。 我们将获取输入,将它们乘以相应的权重并将所有内容相加。 结果是一个数字。
【2.3】非线性部分
最后一部分——是在它上面应用某种非线性函数。
本文使用的最流行的非线性实际上比称为整流线性单元 (ReLU)(或 修正线性单元,Rectified Linear Unit ) 的线性函数更容易。 公式如下:
【公式2】 修正(整流)线性单元公式
1)整流(修正)线性单元公式描述
如果我们的数字大于零,那么我们将按原样采用该数字;
如果它小于零,那么我们将采用零。
2)激活函数:这种应用于神经元顶部线性的非线性函数称为激活函数。 我们必须有某种非线性函数的原因将在后面阐述。
总而言之,神经元是一个函数,它接受一些固定数量的输入并输出一个数字——它的激活。
3)神经元最终公式如下:
【公式3】 神经元公式
提前一点,如果我们以狗和猫为例,我们将把我们的图像作为输入传递给神经元。 您可能想知道,当我将神经元定义为函数时,我们如何传递图像。 您应该记住,我们在计算机中存储图像的方式是将其表示为一个数字数组,每个数字表示给定像素的亮度。 因此,将其传递给神经元的方法是获取该 2D 数组(或在彩色图像的情况下为 3D),将其连续展平以获得 1D 向量并将所有这些数字传递给神经元。
不幸的是,它使我们的神经网络依赖于图像大小,我们只能处理由神经网络定义的给定大小的图像。 现代神经网络已经找到了解决这个问题的方法,但本文我们将有这个限制,为了简化问题。
【2.4】神经网络举例
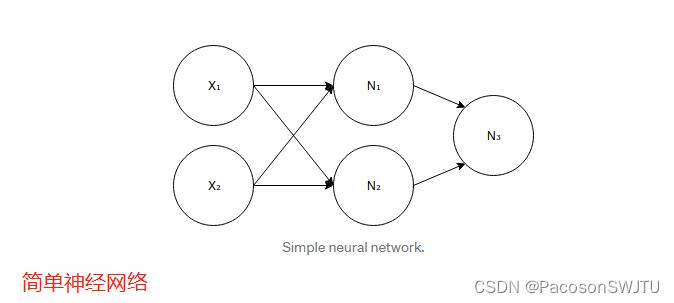
【图2】 简单神经网络
上面定义的网络有 5 个神经元。如您所见,这些神经元堆叠在 3 个完全连接的层中,即一层的每个神经元都连接到下一层的每个神经元。网络中有多少层,每层中有多少神经元以及它们如何连接——所有这些选择都定义了神经网络的架构(结构)。
1)第一层:第一层由 2 个神经元组成,称为输入层。这一层中的神经元实际上并不是我之前描述的神经元,从某种意义上说,它们不执行任何计算。它们仅用于表示网络的输入。
2)对非线性的需求来自这样一个事实:即我们将神经元连接在一起,并且线性函数之上的线性函数本身就是一个线性函数。因此,如果没有在每个神经元中应用非线性函数,则神经网络将是线性函数,因此不会比单个神经元强大。
最后要注意的是,我们通常想要一个介于 0 和 1 之间的数字作为输出神经网络的输出,以便我们将其视为概率。例如,在 dog-vs-cats 中,我们可以将接近零的数字视为猫,将接近一的数字视为狗。为此,我们将对最后一个神经元应用不同的激活函数。
3)我们将使用 sigmoid 激活:关于这个函数,你唯一需要知道的是它返回一个从 0 到 1 的数字,这正是我们想要的。说了这么多,我们准备定义一个与我上面画的网络相对应的函数:
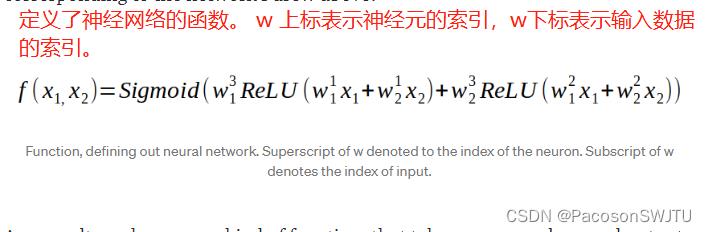
【公式4】 神经网络函数
定义了神经网络的函数。
w 的上标表示神经元的索引(第几个神经元); 如图2 中的神经元N的索引;
w 的下标表示输入数据的索引; 如图2中的输入数据X的索引;
4)小结:
因此,我们有了某种函数,可以定义神经网络 如 f(x1, x2) ,它接受一些数字并输出另一个介于 0 和 1 之间的数字。
这个函数有什么公式实际上并不重要,重要的是我们通过一些权值把复杂的非线性函数参数化,从某种意义上说,我们可以通过改变权重来改变这个函数(神经网络函数)。
【3】损失函数(神经网络效果的度量函数)
在我开始谈论训练之前,唯一需要定义的是损失函数。
1)损失函数定义:是一个函数,它告诉我们,我们的神经网络对某项任务有多好(衡量神经网络的效果)。 直观的做法是,获取每个训练示例,通过神经网络获取数字,从我们想要获得的实际数字(真实值)中减去它并平方它(因为负数与正数一样糟糕)。
即:用真实值减去神经网络输出值 并开平方;
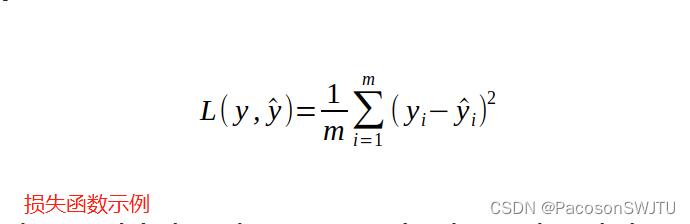
【图3】 损失函数示例
其中 y 代表我们想从网络中获取的数字,y(带帽子) 代表我们通过网络传递示例实际得到的数字,i - 训练示例的索引。 即 y是真实值,y帽子 是神经网络输出结果;需要对两者做比较;
【例】再次以狗对猫为例。
有一个狗和猫的图片数据集,如果是狗,则标记为 1,如果是猫,则标记为 0。 这个标签对应于 y——当我们将图像传递给它时,它是我们想要从网络获取的数字(y)。
为了计算损失函数,我们将遍历数据集中的每个训练示例,计算该示例的 y,然后计算上面定义的函数。 如果损失函数很大,那么我们的神经网络表现不佳,我们希望数字尽可能小。
我们可以重写这个公式,将 y 更改为我们网络的实际函数,以更深入地了解损失函数和神经网络的联系。
【4】训练
当我们从神经网络开始时,我们随机初始化我们的权重。显然,它不会给你带来很好的结果。在训练过程中,我们希望从性能不佳的神经网络开始,并以高精度的网络结束。
在损失函数方面,我们希望我们的损失函数在训练结束时要低得多。改进网络是可能的,因为我们可以通过调整权重来改变它的功能。我们希望找到另一个比最初的函数执行得更好的函数。
训练问题等价于最小化损失函数的问题。为什么要最小化损失而不是最大化?原来损失是更容易优化的功能。
有很多优化函数的算法。这些算法可以基于或不基于梯度,从某种意义上说,它们不仅使用函数提供的信息,还使用其梯度。最简单的基于梯度的算法称为随机梯度下降。让我们看看它是如何工作的。
【4.1】随机梯度下降
首先,我们需要记住关于某个变量的导数是什么。 让我们采用一些简单的函数 f(x) = x。 如果我们记得我们知道的高中微积分规则,那么它的导数在 x 的每个值上都是一个。 它告诉我们什么? 导数是当我们向正方向迈出无限小步时函数变化的速度。 在数学上它可以写成以下形式:
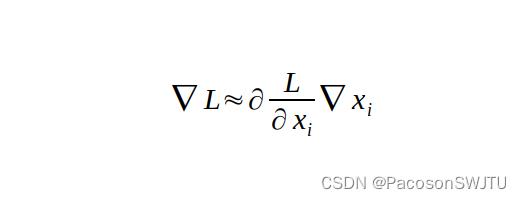
这意味着:我们的函数变化量(左项)大约等于对某个变量 x 的导数乘以x变化量。
当我们采取的步骤无限小时,该近似值将是准确的,这是导数的非常重要的概念。
1)简单导数 f(x) = x
回到我们的简单函数 f(x) = x,我们说我们的导数是 1,这意味着,如果在正方向上采取一些步骤 epsilon(变量名 ε),函数输出将乘以 1 乘以我们的 step epsilon,这就是 ε。 这实际上甚至不是一个近似值,这是准确的。 为什么 ? 因为我们的导数对于 x 的每个值都是相同的。 对于大多数功能来说,情况并非如此。
2)复杂导数 f(x) = x^2
从微积分规则我们知道,该函数的导数是 2x。 如果我们从 x 的某个值开始并进行一些步骤 epsilon,那么我们的函数更改了多少将不会完全等于上面给出的公式。
现在,梯度是偏导数的向量,其元素包含关于函数所依赖的某个变量的导数。 对于我们目前考虑的简单函数,这个向量只包含一个元素,因为我们只使用了接受一个输入的函数。 对于更复杂的函数(比如我们的损失函数),梯度将包含关于我们想要的每个变量的导数。
我们如何使用 导数 为我们提供的这些信息,以最小化某些函数?
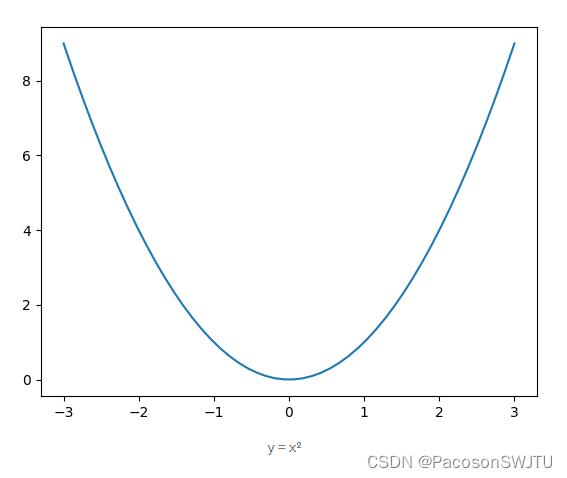
让我们回到函数 f(x) = x²。显然,该函数的最小值在 x = 0 处,但计算机怎么知道呢?
假设我们从 x 的某个随机值开始,该值为 2。函数在 x = 2 中的导数等于 4。这意味着我们朝正方向迈出一步,我们的函数将按比例更改为 4。所以会增加。相反,我们想要最小化我们的函数,所以我们可以朝相反的方向迈出一步,负的,以确保我们的函数会减少,至少一点点。我们能迈出多大的一步?好吧,这是个坏消息。我们的导数只保证如果采取无限小的步长,函数会减小。我们不能那样做。通常,您希望使用某种超参数来控制步长的大小。这个超参数称为学习率,我稍后会谈到。现在让我们看看如果我们从点 x = -2 开始会发生什么。导数现在等于 -4,这意味着,如果在正方向上迈出一小步,我们的函数将与 -4 成比例地变化,因此它会减小。这正是我们想要的。
注意到这里的模式了吗?当x > 0,我们的导数大于零,我们需要往负方向走,当x < 0,我们的导数小于零,我们需要往正方向走。我们总是需要朝着与导数相反的方向迈出一步。让我们将相同的想法应用于渐变。
梯度是指向空间中某个方向的向量。它实际上指向了函数增长最快的方向。由于我们想要最小化我们的函数,我们将朝着梯度的相反方向迈出一步。让我们应用我们的想法。
【梯度下降】
在神经网络中,我们将输入 x 和输出 y 视为固定数字。我们将要对其进行导数的变量是权重 w,因为这些是我们想要更改以改进我们的神经网络的输出值。如果我们根据权重计算损失函数的梯度,并在梯度的相反方向上采取小步骤,我们的损失将逐渐减少,直到收敛到某个局部最小值。这种算法称为梯度下降。在梯度下降的每次迭代中更新权重的规则如下:
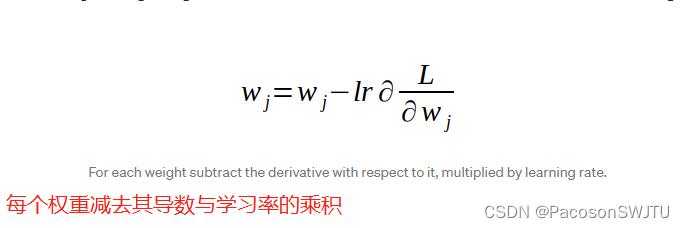
【学习率】
上述符号中的 lr 表示学习率。它可以控制我们在每次迭代中采取的步骤的大小。
它是训练神经网络时要调整的最重要的超参数。如果你选择了太大的学习,那么你会做出太大的步骤,并且会“跳过”最小值。这意味着你的算法会发散。如果您选择的学习率太小,可能需要太多时间才能收敛到某个局部最小值。人们已经开发了一些非常好的技术来找到最佳学习率,但这超出了本文的范围。其中一些在我的另一篇文章“改进我们使用学习率的工作方式”中进行了描述。
https://techburst.io/improving-the-way-we-work-with-learning-rate-5e99554f163b
不幸的是,我们不能真正应用这种算法来训练神经网络,原因在于我们的损失函数公式。
【小批量梯度下降】
从我们上面定义的内容可以看出,我们的公式是总和的平均值。从微积分我们知道,和的导数是导数的和。因此,为了计算损失的导数,我们需要遍历数据集的每个示例。在梯度下降的每次迭代中都这样做是非常低效的,因为算法的每次迭代只会将我们的损失提高一小步。为了解决这个问题,还有另一种算法,称为 Mini-batch Gradient Descent(小批量梯度下降)。更新权重的规则保持不变,但我们不会计算精确的导数。相反,我们将在数据集的一些小型 mini-batch 上近似导数,并使用该导数来更新权重。
小批量不能保证朝着最佳方向采取措施。事实上,它通常不会。使用梯度下降,如果选择足够小的学习率,保证每次迭代你的损失都会减少。对于小批量,这是不正确的。您的损失会随着时间的推移而减少,但会波动并且更加“嘈杂”。
【估计导数批次大小】
用于估计导数的批次大小是您必须选择的另一个超参数。 通常,您希望您的内存可以处理尽可能大的批量大小。 但我很少看到有人使用比 100 大得多的批大小。
批次大小等于 1 的小批量梯度下降的极端版本称为随机梯度下降。 在现代文献中并且非常普遍地,当人们说随机梯度下降(SGD)时,他们实际上指的是小批量梯度下降。 大多数深度学习框架都允许您为 SGD 选择批量大小。
【梯度下降及变体】
最近,越来越多的人一直在使用更高级的算法。 它们中的大多数是基于梯度的,实际上是基于 SGD 并稍作修改。 我也打算写这些。
【4】反向传播
【如何计算损失函数梯度】
关于基于梯度的算法,唯一要说的是我们如何计算梯度。 最快的计算方法是分析地找到每个神经网络架构的导数。 我想,当谈到神经网络时,我不应该说这是一个疯狂的想法。 我们上面为一个非常简单的神经网络定义的公式很难找到所有导数,而且我们只有 6 个参数。 现代建筑有数百万个。
第二种方法,事实上也是最容易实现的,是用我们从微积分中知道的以下公式来近似导数:
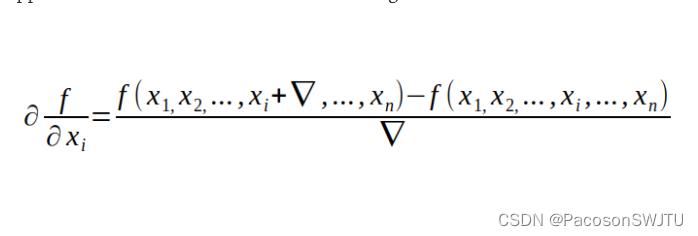
虽然它非常容易实现,但这样做的计算成本太高了。
计算导数的最后一种方法称为反向传播,它可以很好地平衡计算难度和计算成本。 讨论这个算法超出了本文的范围,但如果你想了解更多关于它的信息,请转到本文的最后一部分,我列出了一些资源来了解更多关于神经网络的信息。
【5】为什么会起作用
当我第一次了解神经网络及其工作原理时,我理解了所有的方程式,但我不太确定它们为什么会起作用。我们可以采用一些函数,然后采用一些导数并最终得到可以在图像上区分狗和猫的算法,这对我来说似乎有点超现实。为什么我不能给你一个很好的直觉,为什么神经网络工作得这么好,有一些方面你应该注意。
1)我们用神经网络解决的任何问题都必须以某种数学方式表达。对于狗和猫,情况如下:我们需要找到一个函数,它从图像中获取所有数字并输出它是狗的概率。您实际上可以通过这种方式定义任何分类问题。
2)可能不清楚,为什么会有这样一个函数可以在给定的图像上区分狗和猫。这里的想法是,只要你有一些带有输入和标签的数据集,总会有一个函数在给定的数据集上运行良好。问题是该功能将非常复杂。神经网络可以提供帮助。有一个“通用逼近定理”,它说只有一个隐藏层的神经网络可以尽可能好地逼近任何函数。现在,尚不清楚为什么,即使我们找到了该函数的近似值,它在一个新数据集上的工作效果也一样好,这是一个神经网络在训练期间没有看到的。这被称为泛化问题,它是一个开放的研究问题。研究表明,SGD 具有“自我泛化”效应。但是我们仍然不能很好地理解这个问题。
 创作打卡挑战赛
创作打卡挑战赛
 赢取流量/现金/CSDN周边激励大奖
赢取流量/现金/CSDN周边激励大奖
以上是关于(翻)为什么要训练人工神经网络的主要内容,如果未能解决你的问题,请参考以下文章