基于Matlab的汽车主动悬架控制器设计与仿真
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于Matlab的汽车主动悬架控制器设计与仿真相关的知识,希望对你有一定的参考价值。
1、内容简介
略217-主动被动悬架-LQR
2、内容说明
汽车悬架系统由弹性元件、导向元件和减振器组成,是车身与车轴之间连接的所有组合体零件的总称,也是车架(或承载式车身)与车桥(或车轮)之间一切力传递装置的总称,其主要功能是使车轮与地面有很好的附着性,使车轮动载变化较小,以保证车辆有良好的安全性,缓和路面不平的冲击,使汽车行驶平顺,乘坐舒适,在车轮跳动时,使车轮定位参数变化较小,保证车辆具有良好的操纵稳定性。
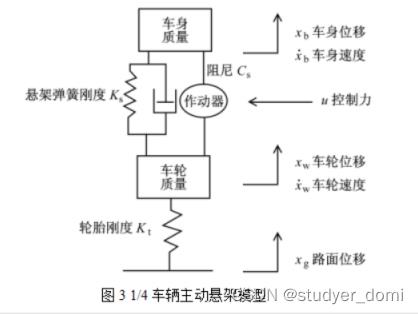
汽车的悬架种类从控制力学的角度大致可以分为被动悬架、半主动悬架、主动悬架3种(如图1所示)。目前,大部分汽车使用被动悬架 ,这种悬架在路面不平或汽车转弯时,都会受到冲击,从而引起变形,这时弹簧起到了减缓冲击的作用,同时弹簧释放能量时,产生振动。为了衰减这种振动 ,在悬架上采用了减振器 ,这种悬架作用是外力引起的,所以称为被动悬架。半主动悬架由可控的阻尼及弹性元件组成 ,悬架的参数在一定范围内可以任意调节。主动悬架是在控制环节中安装了能够产生上下移动力的装置,执行元件针对外力的作用产生一个力来主动控制车身的移动和车轮受到的载荷,即路面的反作用力。随着电控技术的发展,微处理器在车辆中的应用已经日趋普遍,再加上作动器、可调减振器和变刚度弹簧等重大技术的突破,使人们更加注对主动悬架系统的研究。
车辆悬架的特性可以从车身垂直加速度,悬架动行程以及轮胎动位移来研究。本文对主动悬架采用LQG最优设计策略,利用MATLAB/Simulink软件进行仿真,分别对被动悬架与主动悬架建立动力学模型,并对两种悬架的仿真结果做了详细的比较分析与说明。
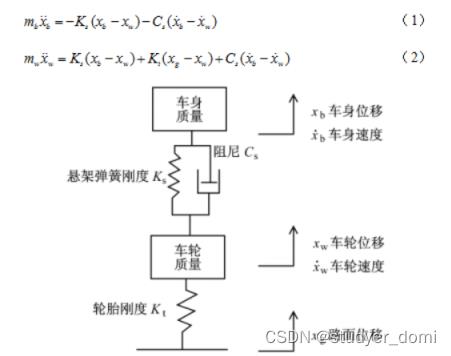
根据牛顿运动定律,利用1/4车辆模型特性,建立被动悬架1/4车辆的动力学模型。其中mb代表车身质量(kg),mw代表车轮质量(kg),xb代表车身位移(m),xw代表车轮位移(m),Ks代表悬架弹簧刚度(N/m),Kt代表轮胎刚度(N/m),Cs代表悬架阻尼(N·s/m),xg代表路面位移(m),代表车身加速度(m/s2),代表车轮速度(m/s),代表车轮加速度(m/s)。图2为被动悬架单轮车辆模型,
式中:f0为下截止频率(Hz);G0为路面不平度系数(m3/cycle),v0为前进车速(m/s);w为数字期望为零的高斯白噪声。
选择某轿车的后悬架作为相关计算参数:mb=320 kg,mw=40 kg,Kt=200 kN/m,悬架工作空间SWSC=±100 mm,G0=5 cm3/cycle,u=20 m/s,f0=0.1Hz,q1=80000,q2=5,q3=1,主动悬架Ks=20 kN/m,Cs=0 N·s/m,被动悬架Ks=22 kN/m,Cs=1 kN·s/m。


主动悬架与被动悬架的主要区别是有无阻尼,本文结合现代控制理论,通过建立车辆的主动悬架与被动悬架的数学模型,利用MATLAB/Simulink软件进行仿真输出,对车身垂直加速度、悬架位移及轮胎变形进行比较,可以明显看出主动悬架要优于被动悬架的车辆,说明主动悬架车辆比被动悬架车辆舒适性好,与实际情况一致。
3、仿真分析
clc
clear all
%被动悬架车辆模型参数
mb=320; %簧载质量(kg)
mw=40; %非簧载质量(kg)
ks=22000; %被动悬架刚度(N/m)
cs=1000; %阻尼系数(N.s/m)
kt=200000; %轮胎刚度(N/m)
swsc=+-100; %悬架工作空间(mm)
%仿真路面输入参数
g0=5*10^-6; %路面不平度系数(m^3/cycle)
u=20; %车速(m/s)
f0=0.1; %下截止频率(Hz)
% %性能指标加权系数
% q1=80000; %轮胎动位移
% q2=5; %悬架动行程
% q3=1; %车身加速度
%系统输入
x0=wgn(10001,1,20); %生成高斯白噪声(采样点数 列数 功率)
t=0:0.005:50; %仿真时间
Tw=[t' x0]; %系统输入序列[仿真时间序列 白噪声序列]
%系统状态方程矩阵
A=[-cs/mb cs/mb -ks/mb ks/mb 0;cs/mw -cs/mw ks/mw -(kt+ks)/mw kt/mw;1 0 0 0 0;0 1 0 0 0;0 0 0 0 -2*pi*f0];
B=[0;0;0;0;2*pi*(g0*u)^0.5];
C=[1 0 0 0 0;0 1 0 0 0;0 0 1 0 0;0 0 0 1 0;0 0 0 0 1];
D=[0 0 0 0 0]';
sim untitled.mdl
fBA=rms(yout(:,1)) %车身加速度均方根
fSWS=rms(yout(:,2)) %悬架动行程均方根
fDTD=rms(yout(:,3)) %轮胎动位移均方根
4、参考论文
以上是关于基于Matlab的汽车主动悬架控制器设计与仿真的主要内容,如果未能解决你的问题,请参考以下文章
matlab/simulink自适应控制轮毂电机驱动的电动汽车主动悬架构型与控制
matlab 遗传算法GA优化汽车四分之一车体主动悬架PID
matlab simulink四分之一高铁车辆模型悬架主动控制