matlab/simulink自适应控制轮毂电机驱动的电动汽车主动悬架构型与控制
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab/simulink自适应控制轮毂电机驱动的电动汽车主动悬架构型与控制相关的知识,希望对你有一定的参考价值。
1、内容简介
略
619-可以交流、咨询、答疑
2、内容说明
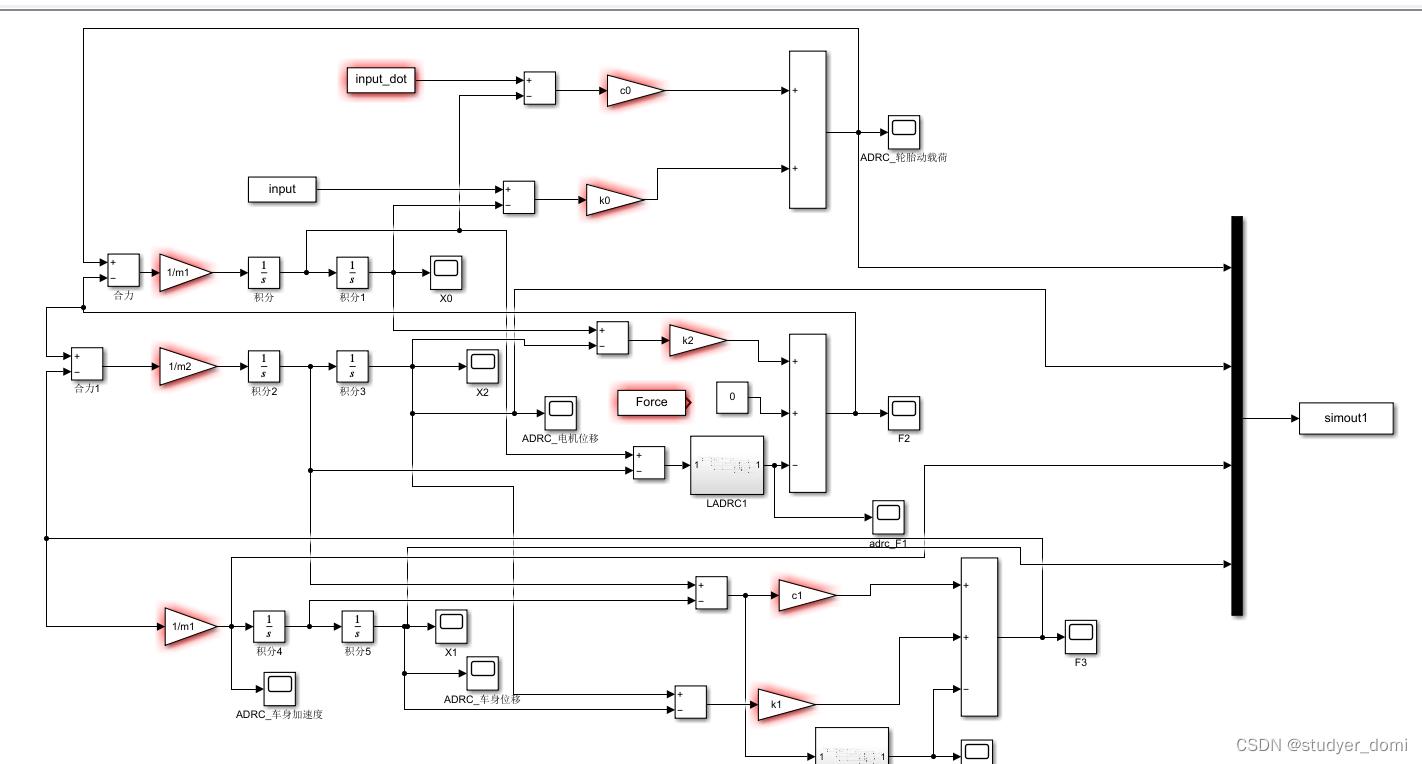
略为提高轮毂电机驱动电动汽车行驶平顺性,在轮辋内安装 3 个对称弹簧 - 阻尼装置形成轮毂电机悬架,车身悬 架为含直线电机作动器的主动悬架 。 建立 1/4 车辆悬架状态模型,采用二次型最优控制,获得直线电机最优输出力,对 直线电机采用内环推力滞环控制 、 外环速度 PID 控制的双闭环控制方式跟踪输出这个最优力,实现主动悬架多闭环控 制 。 利用 MATLAB/Simulink 搭建仿真模型,结果表明,基于直线电机的主动悬架在宽车速及不同路面激励下均可发挥良 好作用 。
为提高轮毂电机驱动电动汽车行驶平顺性,在轮辋内安装 3 个对称弹簧 - 阻尼装置形成轮毂电机悬架,车身悬 架为含直线电机作动器的主动悬架 。 建立 1/4 车辆悬架状态模型,采用二次型最优控制,获得直线电机最优输出力,对 直线电机采用内环推力滞环控制 、 外环速度 PID 控制的双闭环控制方式跟踪输出这个最优力,实现主动悬架多闭环控 制 。 利用 MATLAB/Simulink 搭建仿真模型,结果表明,基于直线电机的主动悬架在宽车速及不同路面激励下均可发挥良 好作用 。 轮毂电机驱动的电动汽车具有动力传输距离短 、 传输损耗小 、 传输效率高和动力可控等一系列优点,是 电动汽车行业发展的热点之一 [ 1 ] 。 然而,在实际应用 中,轮毂电机的引入使得非簧载质量增加,并且电机在 运行过程中难免出现电流波动和转矩波动等现象,这 些都加剧了车身的振动,降低车辆行驶平顺性和乘坐 舒适性 [ 2-3] 。 针对轮毂电机振动大和行车平顺性低等问题, 中外许多学者做了大量研究工作,主要集中在悬架 阻尼调节及主动悬架的控制等方面 。 文献[ 4 ]针对 非簧载质量过大带来的垂向振动负效应,以及汽车 行驶安全性降低,采用基于线性二次最优控制理论 主动悬架解决垂向振动负效应效果明显 。
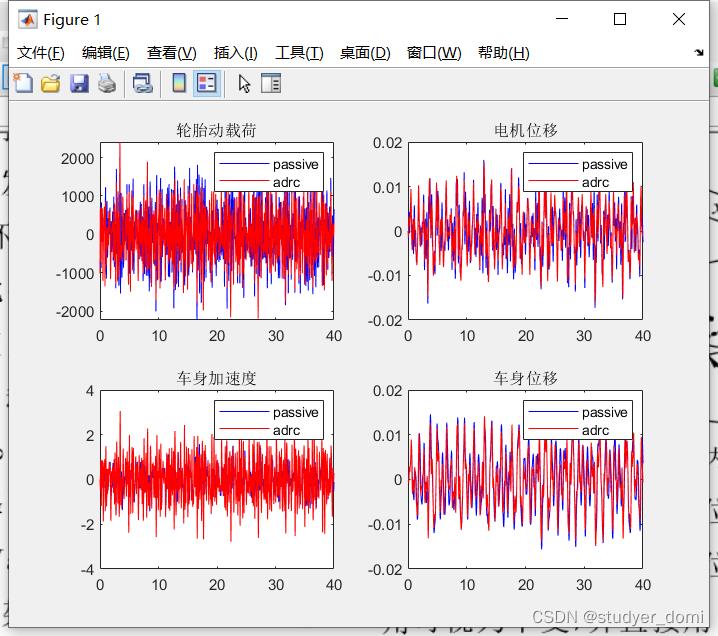
3、仿真分析
4、参考论文
一种轮毂电机悬架构型及其减振性能的研究.caj
S电动汽车用永磁同步电机自抗扰控制研究_孙毅.caj
混合动力车辆永磁同步轮毂电机转速自抗扰控制_陈路明.caj
一种轮毂电机悬架构型及其减振性能的研究.caj
以上是关于matlab/simulink自适应控制轮毂电机驱动的电动汽车主动悬架构型与控制的主要内容,如果未能解决你的问题,请参考以下文章