相机标定之参考坐标系以及坐标变换
Posted 独孤九戒
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了相机标定之参考坐标系以及坐标变换相关的知识,希望对你有一定的参考价值。
一、相机的针孔模型和坐标系
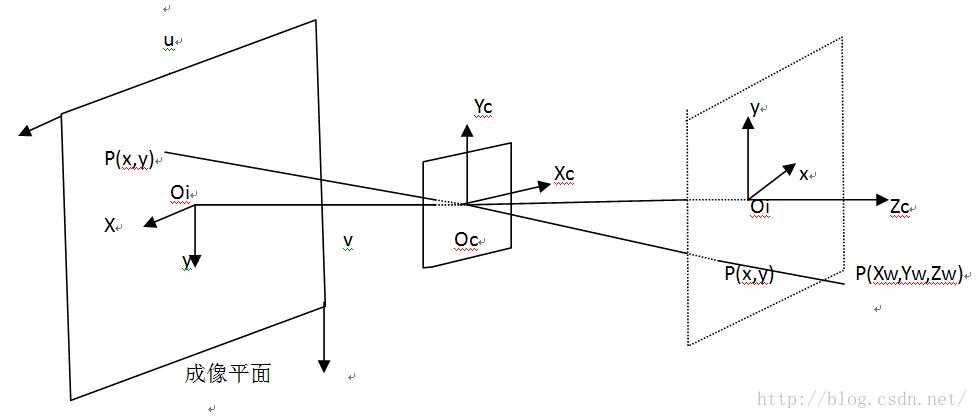
图一 相机的针孔模型
世界坐标系(Xw,Yw,Zw):三维世界坐标系,用以描述三维空间中物体的绝对坐标,满足右手定则;
相机坐标系:以相机的光心作为原点,Zc轴与相机光轴重合,并且垂直于成像平面,且取摄影方向为正方向,Xc,Yc轴与图像物理坐标秀的x,y轴平行;
图像像素坐标系(u,v):以图像的左上方为原点,u轴平行于图像面水平向右,v轴垂直于u轴向下,此坐标系的单位为像素;
图像物理坐标系(x,y):在图像的像素坐标系的基础之上,我们建立了具有实际物理意义的坐标系,该坐标系具有诸如mm的物理单位。原点为图像的中心(u0,v0),x,y轴分别平行于像素坐标系的坐标轴。
二、坐标变换
2.1 二维坐标变换
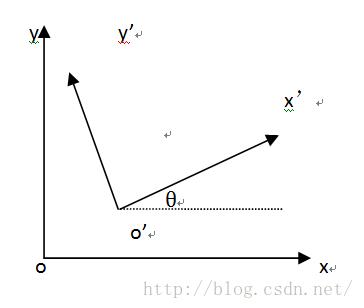
图二 二维坐标变换
推导过程如下:

二维坐标旋转矩阵:
R为单位正交矩阵,有:


性质:

2.2 三维空间的坐标变换
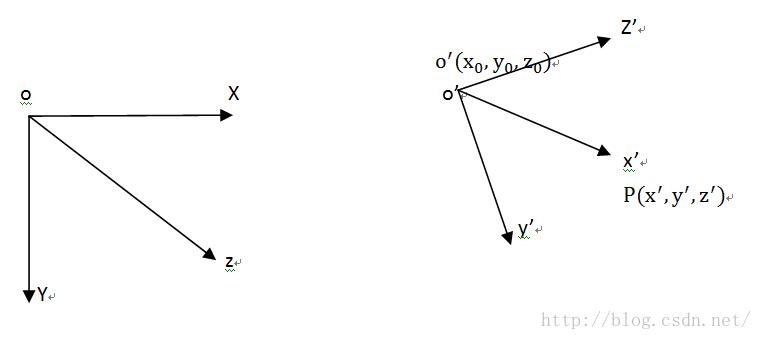
图三 三维坐标变换
在三维空间,我们依然从旋转和平移两个角度来考虑世家坐标系到相机坐标系的变换。
推导过程如下:
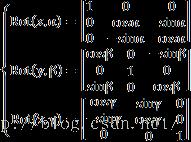
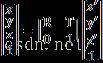
其中:


旋转矩阵R依旧是单位正交矩阵,满足如下性质:

2.3 图像物理坐标系到图像像素坐标系的变换
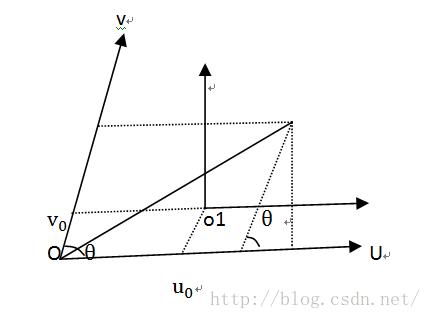
图四 图像数字化
o1在u,v中的坐标为(u0,v0),像素在轴上的物理尺寸为dx,dy。
变换过程如下:
齐次坐标形式如下:
其中:

2.4 世界坐标系到图像像素坐标系的变换
相机坐标系到图像物理坐标系的变换:
相机坐标系到图像像素坐标系的变换:

世界坐标系到图像像素坐标系的变换:
以上是关于相机标定之参考坐标系以及坐标变换的主要内容,如果未能解决你的问题,请参考以下文章