基于 locust/boomer 为核心的简单 http 接口分布式性能测试工具
Posted 酔清风
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于 locust/boomer 为核心的简单 http 接口分布式性能测试工具相关的知识,希望对你有一定的参考价值。
目标
构建一个分布式的 Http 接口的压力测试平台,核心基于开源的 locust,因为 python 的压测能力较低,slaver 端采用开源的用 go 改写的 boomer。
原版需要提供完整的 go 脚本/python 脚本,一次一用,对他人使用难度大。
设想可以提供 postman 类似的界面来构造接口描述信息,由 master 推送给各个 worker。
各个 worker 解析接口描述信息生成满足 boomer 要求的请求并运行。
通过 locust 的 api 获取指标信息,可以绘制实时折线图(可以改造为 推送 prometheus,配合 grafana 查看历史记录)
想要达到分担压力测试的 worker 可随意增加的目的,所以 master(flask)需要自动发现 woker(boomer)的功能
因为为了日后官方更新后好维护,不想改动 locust 源码和 boomer 源码。
只想在其上层包装,那 master 端依然 python 改写,slaver 依然使用 go 改写。要解决两者信息传递问题。
无责任草图

完成的结果
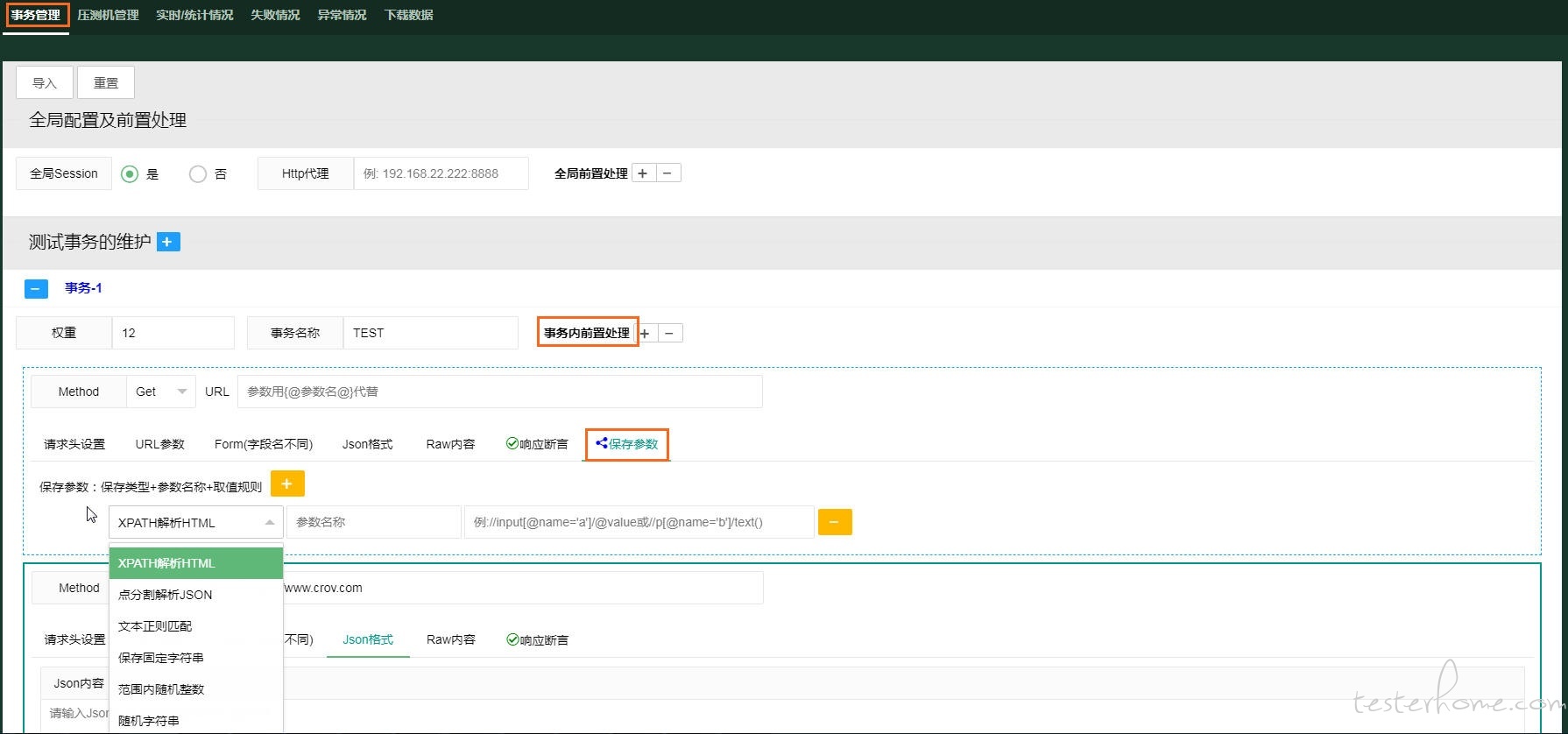
- 有 1 个类似 Postman 一样的事务管理页面:
- 可以设置全局代理是全局 session
- 可以设置全局性的前置步骤(其实就是请求链,比如:先获取 token 并保存参数,再带上此 token 参数提交登录请求)
- 可以编写并行的事务及对应权重,
- 每个事务也可编写事务内前置请求链及需要测试的 API 请求
- 提供多种参数保存方式(xpath 解析 html、json 字段获取、正则获取、固定字符串...)
- 保存好事务,或备份事务到本地
- 提供压测机管理页面
- 提供编译好的压测端(window64,linux64,注:macOS 的在文件夹 slaveEXE 中)下载
- 按照说明(见 readme)执行压测命令(页面上的我写死了 ip,勿理会)
- 将事务保存后,选择压测端提交
- 剩余就和原 locust 的操作一致了
- 只是实现了简单的有 UI 的事务管理及分布式压测器管理,其他的没做



主要模块的设计说明
改造第一步:了解 boomer 默认服务的启动方式并构建自定义的 Boomer。
主要重点是是修改 boomer 默认方式,改为为可以自定义管理启动、关闭,这样要新建一个使用暴露的公共 Boomer 的 struct 构建一个自定义的 Boomer 实例。
重点是关闭处理:
关闭信号可以来自系统关闭信号(ctrl+c 这种)、可以来自 master 发送的消息、可以是因为其他原因。
- 第一种可以不考虑,因为在其上层还会包装 gRPC 服务作为主进程,它有系统关闭信号处理。
- 第二种可以使用 WaitGroup+ 无缓冲 channel 解决。
- 第三种可以理解为意料之外的关闭,阅读 boomer 源码,可以知道调用 boomer.quit() 会在 mq 中发布一个"boomer:quit"的 topic。我们只要订阅这个 topic 然后执行回调方法进行任务结束相关处理。 代码参考,waitForQuit 方法在协程中启动 boomer 后,调用即可。quitSignal 可以在获取 master 的停止调用时塞值,停止堵塞:
// 全局boomer
var globalBoomer *boomer.Boomer
// 接受来自EndBoomer的请求处理
var quitSignal chan int=make(chan int)
// boomer运行状态
var boomerStatus = false
// boomer等待退出
func waitForQuit(gboomer *boomer.Boomer)
quitByClient :=false
boomer.Events.SubscribeOnce("boomer:quit", func() //防止重复订阅
defer func()
r:=recover();if r!=nil
fmt.Println("处理Boomer关闭遇到异常:",r)
()
boomerStatus=false // 结束运行
if !quitByClient
quitSignal<-1 // 释放下面EndBommer处理协程
fmt.Println("事件订阅中获取了非Client关闭Boomer的消息")
fmt.Println("boomer服务已经关闭")
)
go func() // 此处添加通过EndBommer获取关闭boomer信号处理的代码
<-quitSignal
fmt.Println("从管理机client获取了关闭Boomer的消息")
if boomerStatus
quitByClient=true
gboomer.Quit()
()
改造第二步:woker 端的 gRPC 服务/etcd 和 protobuf
gRPC/etcd 服务端部分主要五步(代码就不贴了)
1-建立一个 http 监听服务
2-建立 gRPC 服务句柄,将服务 struct 注册到 gRPC 中
3-建立 etcd 客户端,将 gRPC 的 “服务名 + 服务地址” 添加到 etcd 上,并增加心跳检查保持长连接
4-开启一个协程监听关闭/中断信号,注销 etcd 上的信息
5-gRPC 服务使用 http 监听服务启动
protobuf 文件:master 端(go)和 woker 端(python)通信结构描述文件
使用 proto 文件配合对应语言工具,可以自动对应语言的 gRPC 接口代码,省事省心.
syntax = "proto3";
option go_package = ".;boomerCall";
service BoomerCallService
rpc InitBommer(InitBommerRequest)returns(BoomerCallResponse)
rpc EndBommer(EndBommerRequest)returns(BoomerCallResponse)
message InitBommerRequest
message SaveParamAction
int32 SaveType = 1; // 0-HTML-XPATH解析;1-JSON-解析; 2-文本正则匹配; 3-保存固定字符串
string ParamName = 2; // 全局变量名称
string RuleValue = 3;
message AssertAction
int32 AssertType = 1; // 0-状态码等于; 1-响应内容字节长度小于;2-响应内容直接长度等于;3-响应内容直接长度大于
int32 RuleValue = 2;
message HttpRequest
string UrlPath = 1;
string Method = 2;
map<string, string> Headers = 3;
map<string, string> DictData = 4;
map<string, string> Params = 5;
string RawData = 6;
string JsonData = 7;
repeated SaveParamAction SaveParamChain = 8;
repeated AssertAction AssertChain = 9;
message TestTask
string TaskName = 1;
int32 TaskWeight = 2;
repeated HttpRequest PreWork = 3; // 准备工作请求,比如获取token
HttpRequest TestWork = 4; // 主要性能测试任务
bool isSession = 1;
repeated HttpRequest PreTask = 2; // 前置任务
repeated TestTask MainTask = 3; // 测试任务
string LocustMaster = 4;
string HttpProxy = 5;
message EndBommerRequest
message BoomerCallResponse
bool status = 1;
string message = 2;
// protoc --go_out=plugins=grpc:. *.proto
// protoc --go_out=plugins=grpc:输出目录 proto文件
// python3 -m grpc_tools.protoc --python_out=. --grpc_python_out=. -I. *.proto
// --python_out=. : 编译生成处理 protobuf 相关的代码的路径, 这里生成到当前目录
// --grpc_python_out=. : 编译生成处理 grpc 相关的代码的路径, 这里生成到当前目录
// -I. *.proto : proto 文件的路径, 这里的 proto 文件在当前目录
改造第三步:master 端 python 端 etcd 客户端的心跳检查
心跳检查处理
python 版的 etcd3 客户端找了一圈,都比较简陋,只好使用 etcd3 这个包。
一开始尝试该包的 watch 方式,用新的线程去更新服务方变化,但是发现包中 watch 方法会堵塞客户端(无法进行其他比如发送请求操作,大坑)
只好放弃,改用采用每隔 5 秒这种心跳检测的方法来处理。
def __checkHeartBeat(self):
print("......连接etcd服务:%s,并心跳检查......" % (self.etcdAddr))
def __resetEtcdClient():
self.etcdClient.close()
ectdAddrReslv = self.etcdAddr.split(":")
self.etcdClient=etcd3.client(ectdAddrReslv[0],ectdAddrReslv[1])
errCount=1
while not self.stop_flag:
self.servAddressList.clear()
try:
for kv in self.etcdClient.get_prefix_response(self.servAddrPrefix).kvs:
self.servAddressList.append(kv.value.decode('utf-8'))
errCount=1 # 重置错误次数
gevent.sleep(2) # 2s 检查一次
except Exception as e:
if errCount>60: # 超过5分钟
print(".....etcd尝试次数超过上限,退出....." )
exit(2)
gevent.sleep(5)
print(".....获取etcd的key:异常:%s。正在尝试第%d次....."%(e,errCount))
__resetEtcdClient()
errCount+=1
改造第四步:master 端 python 端 web 页面增加压测机管理及事务管理页面
在原 woker 情况表格下增加可用压测机表格,增加了选择压测机进行事务初始化功能,比较简单。
事务管理页面结构嵌套多,页面复杂,原版的 locust 提供的组件根本不够用
页面结构说明:
- 全局前置处理,可以有多个。
- 测试任务,可以有多个。
- 每个测试任务也有任务内前置处理,可以有多个;也有测试项本身。
- 每个前置处理、测试项都包含:请求方法、URL、请求头设置,请求参数,请求 form 字段、raw、保存参数、断言。
- 其中请求头设置可以有多个
- 请求参数可以有多个
- 请求 form 字段可以有多个
- 保存参数可以有多个
- 断言可以有都个
为了应付 flask 模板的兼容问题,使用 layui+iframe+flask 模板方式解决。
后端的事务管理页面特别麻烦,因为结构复杂,相同字段名多;
另外还有导入功能 -- 要初始化好导入后的页面,采用从最小模块开始设计,灵活组合,一步步满足上层要求
福利

以上是关于基于 locust/boomer 为核心的简单 http 接口分布式性能测试工具的主要内容,如果未能解决你的问题,请参考以下文章
性能测试工具 Locust + Boomer In Docker
最简单的视频编码器:基于libx264(编码YUV为H.264)
最简单的视频编码器:基于libx265(编码YUV为H.265)