串口通信之————IIC(软件驱动)
Posted 小光学嵌入式
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了串口通信之————IIC(软件驱动)相关的知识,希望对你有一定的参考价值。
B站账号:小光学嵌入式
- ⏩ 大家好哇!我是小光,嵌入式爱好者,一个想要成为系统架构师的大二学生。
- ⏩最近开始系统性补习STM32基础知识,规划有:串口通信,Github,Ucos等等。
- ⏩今天总结一下串口通信之stm32-IIC。
USART
一.原理讲解
请跳转->串口通信————UART、I2C、SPI详解(总结篇
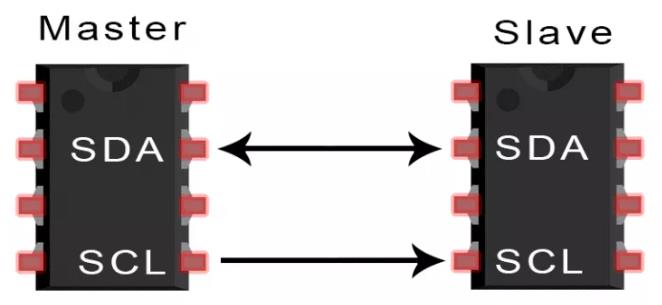
从上面的文章中,我们知道IIC的通信方式是:半双工、同步、串口通信。
接线有两根:
SDA–数据线
SCL–时钟线
二.驱动编写
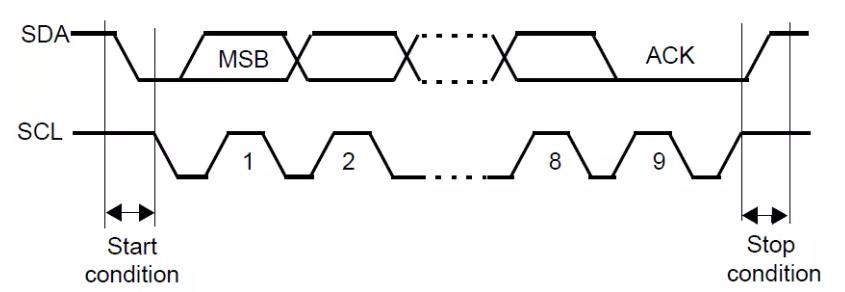
在编写驱动之前大家可以先了解一下IIC传输数据的步骤:
传输步骤
1.在SCL线为高电平时,主机通过将SDA线从高电平切换到低电平来启动总线通信。
2.主机向总线发送要与之通信的从机的7位或10位地址,以及读/写位
3.每个从机将主机发送的地址与其自己的地址进行比较。如果地址匹配,则从机通过将SDA线拉低一位返回一个ACK位。如果主机的地址与从机的地址不匹配,则从机将SDA线拉高。
4.主机发送或接收数据帧;
5.传输完每个数据帧后,接收设备将另一个ACK位返回给发送方,以确认已成功接收到该帧;
6.随后主机将SCL切换为高电平,然后再将SDA切换为高电平,从而向从机发送停止条件。
1.接口定义与初始化
//IO方向设置
#define SDA_IN() GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;
#define SDA_OUT() GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;
//IO操作函数
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //输入SDA
首先让我们在和STM32F1中文参考手册找到下面的资料:
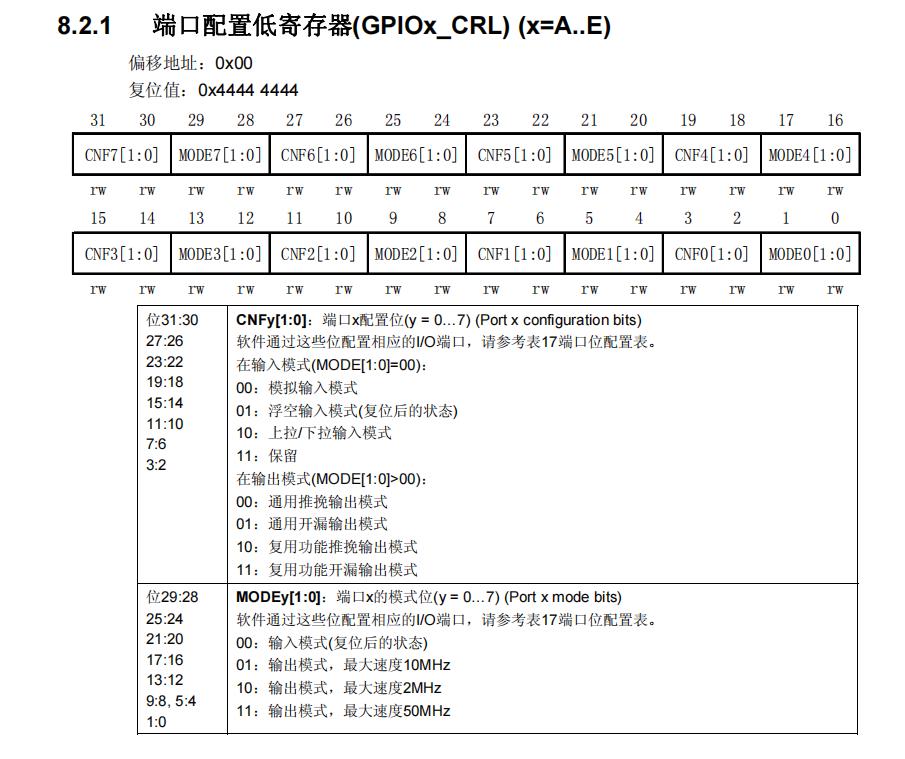
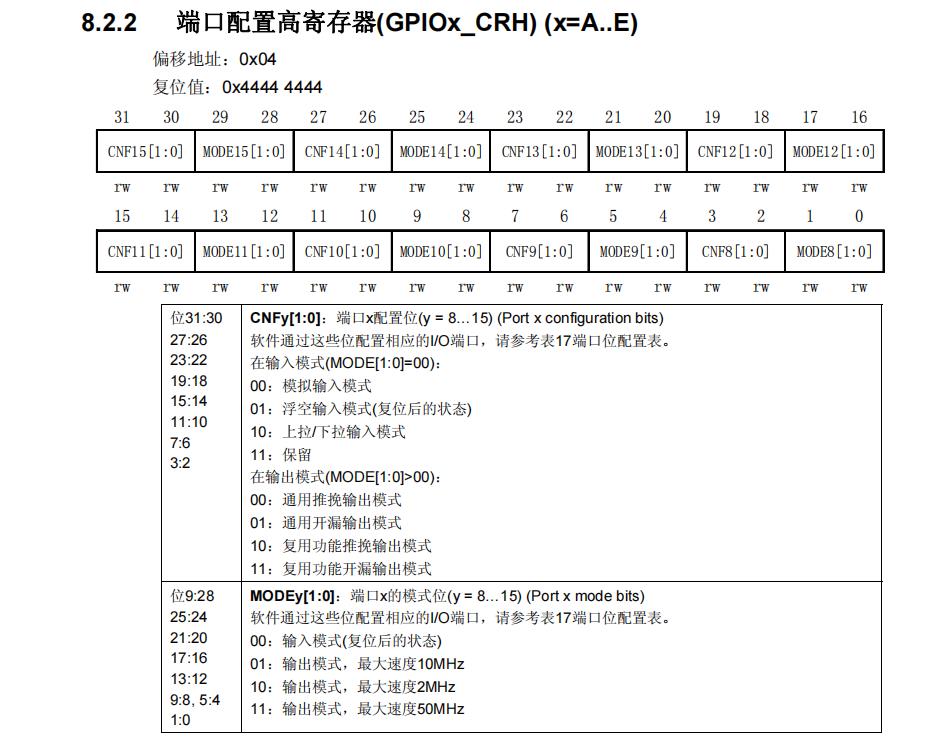
这两张图可以帮助我们解释:#define SDA_IN() GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28; #define SDA_OUT() GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;为什么要这样配置,因为我们的SDA是需要双向的,需要输入和输出随时切换所以这样配置更加方便的调整输入和输出模式:
GPIOB->CRL&=0X0FFFFFFF;
GPIOB->CRL&=0X0FFFFFFF;
我们要配置的是PB7所以用的是GPIOB->CRL,然后再将我们需要配置的位也就是3:2位和1:0位 置为0;然后方便我们下一步配置:
GPIOB->CRL|=(u32)8<<28;//0b1000 3:2位置为1:0:输出模式最大10MHZ,1:0位置为0:0:通用推挽输出模式
GPIOB->CRL|=(u32)3<<28;//0b0011 3:2位置为0:0:输入模式 , 1:0位置为1:1;保留
因为我们刚才把3:2:1:0位置0了,现在用|运算可以直接置位;
//初始化IIC
void IIC_Init(void)
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); //使能GPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_7); //PB6,PB7 输出高
这一步呢就是简单的IO口初始化了。
IIC操作函数详解
//IIC所有操作函数
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号
void IIC_Start(void); //发送IIC开始信号
根据图可知:SCL的启动条件是:当SCL为高电平时,SDA从高电平像低电平转换。
//产生IIC起始信号
void IIC_Start(void)
SDA_OUT(); //sda线输出
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
代码就演示了这一过程:
- SDA线配置为输出模式
- SDA和SCL线输出高电平,SDA再转换成低电平
- 最后SCL再变成低电平
总结就是:SDA和SCL初始高电平,然后SCL先拉低,SCL再拉低。
void IIC_Stop(void); //发送IIC停止信号
//产生IIC停止信号
void IIC_Stop(void)
SDA_OUT();//sda线输出
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//发送I2C总线结束信号
delay_us(4);
停止信号过程为:
- SDA线为输出模式
- 先拉低SCL,再拉低SDA
- 先拉高SCL,再拉高SDA
总结为SCL要在SDA之前从低变高
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
//IIC_SDA=(txd&0x80)>>7;
if((txd&0x80)>>7)//这个是我不是很理解的地方,不过最后也理解了
IIC_SDA=1;
else
IIC_SDA=0;
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
假设我们要发送的数据是 c:ascii码为99 二进制位:0101 0011
因为是从高位开始发送数据的,所以我们第一个要发送的数据是:0,如何get到这个0呢
IIC_SDA=(txd&0x80)>>7;//获取最高位
这一步就可以实现,代码中使用的是判断再赋值,效果是一样的。
txd<<=1;//数据左移一位
每次循环让txd左移,这样就可以依次发送每一位数据了。
然后还有一个重点就是,在SDA为发送数据的时候,SCL一定要为高电平,所以代码后面会有一个SCL从高电平向低电平转换的过程。
u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )//每次循环读取一个二进制位,存放一个字节的数据到receive
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
了解了发送字节的代码之后,这个读取代码也就非常好理解了。
也就是多加了一个ACK的参数来确认是否继续读取数据。
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
u8 ucErrTime=0;
SDA_IN(); //SDA设置为输入
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
ucErrTime++;
if(ucErrTime>250)
IIC_Stop();
return 1;
IIC_SCL=0;//时钟输出0
return 0;
void IIC_Ack(void); //IIC发送ACK信号
//产生ACK应答
void IIC_Ack(void)
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
void IIC_NAck(void); //IIC不发送ACK信号
//不产生ACK应答
void IIC_NAck(void)
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
总结
以上就是对IIC基本的驱动函数的编写的我的理解,有错误还望指正,然后大家再用到一些IIC驱动的一些函数的时候,它的IIC协议可能更加不一样,就比如在从机一多之后,我们会根据地址对不同的IIC进行读写操作,这里就涉及到先要匹配从机 的地址,在这之后再进行读写的操作。
注意:在很多转换电平的时候我们需要加入4us延时,是因为要保证接受的时候更加稳定,保证数据的正确性。
以上是关于串口通信之————IIC(软件驱动)的主要内容,如果未能解决你的问题,请参考以下文章