Apm飞控学习笔记-姿态控制-Cxm
Posted CHENxiaomingming
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Apm飞控学习笔记-姿态控制-Cxm相关的知识,希望对你有一定的参考价值。
目录
 https://blog.csdn.net/chen_taifu/article/details/122115245?spm=1001.2014.3001.5502
https://blog.csdn.net/chen_taifu/article/details/122115245?spm=1001.2014.3001.5502官方给出的控制函数 和基本参数
Copter Attitude Control — Dev documentation https://ardupilot.org/dev/docs/apmcopter-programming-attitude-control-2.html
https://ardupilot.org/dev/docs/apmcopter-programming-attitude-control-2.html

这是姿态模式的源码
最后的
// call attitude controller
attitude_control->input_euler_angle_roll_pitch_euler_rate_yaw(target_roll, target_pitch, target_yaw_rate);
// output pilot's throttle
attitude_control->set_throttle_out(get_pilot_desired_throttle(),
true,
g.throttle_filt);
就是将解析出来的遥控器舵量传给姿态控制器中
其他的大部分在官网里面都有讲解
#include "Copter.h"
/*
* Init and run calls for stabilize flight mode
*/
// stabilize_run - runs the main stabilize controller
// should be called at 100hz or more
void ModeStabilize::run()
// apply simple mode transform to pilot inputs
update_simple_mode();
// convert pilot input to lean angles
float target_roll, target_pitch;
get_pilot_desired_lean_angles(target_roll, target_pitch, copter.aparm.angle_max, copter.aparm.angle_max);
// get pilot's desired yaw rate
float target_yaw_rate = get_pilot_desired_yaw_rate(channel_yaw->get_control_in());
if (!motors->armed())
// Motors should be Stopped
//飞机全部停止
motors->set_desired_spool_state(AP_Motors::DesiredSpoolState::SHUT_DOWN);
else if (copter.ap.throttle_zero)
// Attempting to Land
//降落状态
motors->set_desired_spool_state(AP_Motors::DesiredSpoolState::GROUND_IDLE);
else
//解锁飞机控制
motors->set_desired_spool_state(AP_Motors::DesiredSpoolState::THROTTLE_UNLIMITED);
switch (motors->get_spool_state())
case AP_Motors::SpoolState::SHUT_DOWN:
// Motors Stopped
attitude_control->set_yaw_target_to_current_heading();
attitude_control->reset_rate_controller_I_terms();
break;
case AP_Motors::SpoolState::GROUND_IDLE:
// Landed
attitude_control->set_yaw_target_to_current_heading();
attitude_control->reset_rate_controller_I_terms_smoothly();
break;
case AP_Motors::SpoolState::THROTTLE_UNLIMITED:
// clear landing flag above zero throttle
if (!motors->limit.throttle_lower)
set_land_complete(false);
break;
case AP_Motors::SpoolState::SPOOLING_UP:
case AP_Motors::SpoolState::SPOOLING_DOWN:
// do nothing
break;
// call attitude controller
attitude_control->input_euler_angle_roll_pitch_euler_rate_yaw(target_roll, target_pitch, target_yaw_rate);
// output pilot's throttle
attitude_control->set_throttle_out(get_pilot_desired_throttle(),
true,
g.throttle_filt);
libraries\\AP_Motors\\AP_Motors_Class.h
这个类里面有响应的控制函数 里面的数据范围和 官网给的 会有一些不一样
这个是很直接的电机输出控制 所以 并不是很推荐
class AP_Motors
public:
enum motor_frame_class
MOTOR_FRAME_UNDEFINED = 0,
MOTOR_FRAME_QUAD = 1,
MOTOR_FRAME_HEXA = 2,
MOTOR_FRAME_OCTA = 3,
MOTOR_FRAME_OCTAQUAD = 4,
MOTOR_FRAME_Y6 = 5,
MOTOR_FRAME_HELI = 6,
MOTOR_FRAME_TRI = 7,
MOTOR_FRAME_SINGLE = 8,
MOTOR_FRAME_COAX = 9,
MOTOR_FRAME_TAILSITTER = 10,
MOTOR_FRAME_HELI_DUAL = 11,
MOTOR_FRAME_DODECAHEXA = 12,
MOTOR_FRAME_HELI_QUAD = 13,
;
enum motor_frame_type
MOTOR_FRAME_TYPE_PLUS = 0,
MOTOR_FRAME_TYPE_X = 1,
MOTOR_FRAME_TYPE_V = 2,
MOTOR_FRAME_TYPE_H = 3,
MOTOR_FRAME_TYPE_VTAIL = 4,
MOTOR_FRAME_TYPE_ATAIL = 5,
MOTOR_FRAME_TYPE_PLUSREV = 6, // plus with reversed motor direction
MOTOR_FRAME_TYPE_Y6B = 10,
MOTOR_FRAME_TYPE_Y6F = 11, // for FireFlyY6
MOTOR_FRAME_TYPE_BF_X = 12, // X frame, betaflight ordering
MOTOR_FRAME_TYPE_DJI_X = 13, // X frame, DJI ordering
MOTOR_FRAME_TYPE_CW_X = 14, // X frame, clockwise ordering
MOTOR_FRAME_TYPE_I = 15, // (sideways H) octo only
MOTOR_FRAME_TYPE_BF_X_REV = 18, // X frame, betaflight ordering, reversed motors
;
// Constructor
AP_Motors(uint16_t loop_rate, uint16_t speed_hz = AP_MOTORS_SPEED_DEFAULT);
// singleton support
static AP_Motors *get_singleton(void) return _singleton;
// check initialisation succeeded
bool initialised_ok() const return _flags.initialised_ok;
// arm, disarm or check status status of motors
bool armed() const return _flags.armed;
void armed(bool arm);
// set motor interlock status
void set_interlock(bool set) _flags.interlock = set;
// get motor interlock status. true means motors run, false motors don't run
bool get_interlock() const return _flags.interlock;
// set_roll, set_pitch, set_yaw, set_throttle
void set_roll(float roll_in) _roll_in = roll_in; ; // range -1 ~ +1
void set_roll_ff(float roll_in) _roll_in_ff = roll_in; ; // range -1 ~ +1
void set_pitch(float pitch_in) _pitch_in = pitch_in; ; // range -1 ~ +1
void set_pitch_ff(float pitch_in) _pitch_in_ff = pitch_in; ; // range -1 ~ +1
void set_yaw(float yaw_in) _yaw_in = yaw_in; ; // range -1 ~ +1
void set_yaw_ff(float yaw_in) _yaw_in_ff = yaw_in; ; // range -1 ~ +1
void set_throttle(float throttle_in) _throttle_in = throttle_in; ; // range 0 ~ 1
void set_throttle_avg_max(float throttle_avg_max) _throttle_avg_max = constrain_float(throttle_avg_max, 0.0f, 1.0f); ; // range 0 ~ 1
void set_throttle_filter_cutoff(float filt_hz) _throttle_filter.set_cutoff_frequency(filt_hz);
void set_forward(float forward_in) _forward_in = forward_in; ; // range -1 ~ +1
void set_lateral(float lateral_in) _lateral_in = lateral_in; ; // range -1 ~ +1
// accessors for roll, pitch, yaw and throttle inputs to motors
float get_roll() const return _roll_in;
float get_pitch() const return _pitch_in;
float get_yaw() const return _yaw_in;
float get_throttle_out() const return _throttle_out;
float get_throttle() const return constrain_float(_throttle_filter.get(), 0.0f, 1.0f);
float get_throttle_bidirectional() const return constrain_float(2 * (_throttle_filter.get() - 0.5f), -1.0f, 1.0f);
float get_forward() const return _forward_in;
float get_lateral() const return _lateral_in;
virtual float get_throttle_hover() const = 0;
// motor failure handling
void set_thrust_boost(bool enable) _thrust_boost = enable;
bool get_thrust_boost() const return _thrust_boost;
virtual uint8_t get_lost_motor() const return 0;
// desired spool states
enum class DesiredSpoolState : uint8_t
SHUT_DOWN = 0, // all motors should move to stop
GROUND_IDLE = 1, // all motors should move to ground idle
//解锁
THROTTLE_UNLIMITED = 2, // motors should move to being a state where throttle is unconstrained (e.g. by start up procedure)
;
void set_desired_spool_state(enum DesiredSpoolState spool);
enum DesiredSpoolState get_desired_spool_state(void) const return _spool_desired;
// spool states
enum class SpoolState : uint8_t
SHUT_DOWN = 0, // all motors stop
GROUND_IDLE = 1, // all motors at ground idle
SPOOLING_UP = 2, // increasing maximum throttle while stabilizing
THROTTLE_UNLIMITED = 3, // throttle is no longer constrained by start up procedure
SPOOLING_DOWN = 4, // decreasing maximum throttle while stabilizing
;
// get_spool_state - get current spool state
enum SpoolState get_spool_state(void) const return _spool_state;
// set_density_ratio - sets air density as a proportion of sea level density
void set_air_density_ratio(float ratio) _air_density_ratio = ratio;
// structure for holding motor limit flags
struct AP_Motors_limit
uint8_t roll : 1; // we have reached roll or pitch limit
uint8_t pitch : 1; // we have reached roll or pitch limit
uint8_t yaw : 1; // we have reached yaw limit
uint8_t throttle_lower : 1; // we have reached throttle's lower limit
uint8_t throttle_upper : 1; // we have reached throttle's upper limit
limit;
// set limit flag for pitch, roll and yaw
void set_limit_flag_pitch_roll_yaw(bool flag);
//
// virtual functions that should be implemented by child classes
//
// set update rate to motors - a value in hertz
virtual void set_update_rate( uint16_t speed_hz ) _speed_hz = speed_hz;
// init
virtual void init(motor_frame_class frame_class, motor_frame_type frame_type) = 0;
// set frame class (i.e. quad, hexa, heli) and type (i.e. x, plus)
virtual void set_frame_class_and_type(motor_frame_class frame_class, motor_frame_type frame_type) = 0;
// output - sends commands to the motors
virtual void output() = 0;
// output_min - sends minimum values out to the motors
virtual void output_min() = 0;
// output_test_seq - spin a motor at the pwm value specified
// motor_seq is the motor's sequence number from 1 to the number of motors on the frame
// pwm value is an actual pwm value that will be output, normally in the range of 1000 ~ 2000
virtual void output_test_seq(uint8_t motor_seq, int16_t pwm) = 0;
// get_motor_mask - returns a bitmask of which outputs are being used for motors (1 means being used)
// this can be used to ensure other pwm outputs (i.e. for servos) do not conflict
virtual uint16_t get_motor_mask() = 0;
// pilot input in the -1 ~ +1 range for roll, pitch and yaw. 0~1 range for throttle
void set_radio_passthrough(float roll_input, float pitch_input, float throttle_input, float yaw_input);
// set loop rate. Used to support loop rate as a parameter
void set_loop_rate(uint16_t loop_rate) _loop_rate = loop_rate;
// return the roll factor of any motor, this is used for tilt rotors and tail sitters
// using copter motors for forward flight
virtual float get_roll_factor(uint8_t i) return 0.0f;
// This function required for tradheli. Tradheli initializes targets when going from unarmed to armed state.
// This function is overriden in motors_heli class. Always true for multicopters.
virtual bool init_targets_on_arming() const return true;
enum pwm_type PWM_TYPE_NORMAL = 0,
PWM_TYPE_ONESHOT = 1,
PWM_TYPE_ONESHOT125 = 2,
PWM_TYPE_BRUSHED = 3,
PWM_TYPE_DSHOT150 = 4,
PWM_TYPE_DSHOT300 = 5,
PWM_TYPE_DSHOT600 = 6,
PWM_TYPE_DSHOT1200 = 7;
pwm_type get_pwm_type(void) const return (pwm_type)_pwm_type.get();
protected:
// output functions that should be overloaded by child classes
virtual void output_armed_stabilizing() = 0;
virtual void rc_write(uint8_t chan, uint16_t pwm);
virtual void rc_write_angle(uint8_t chan, int16_t angle_cd);
virtual void rc_set_freq(uint32_t mask, uint16_t freq_hz);
virtual uint32_t rc_map_mask(uint32_t mask) const;
// add a motor to the motor map
void add_motor_num(int8_t motor_num);
// update the throttle input filter
virtual void update_throttle_filter() = 0;
// save parameters as part of disarming
virtual void save_params_on_disarm()
// flag bitmask
struct AP_Motors_flags
uint8_t armed : 1; // 0 if disarmed, 1 if armed
uint8_t interlock : 1; // 1 if the motor interlock is enabled (i.e. motors run), 0 if disabled (motors don't run)
uint8_t initialised_ok : 1; // 1 if initialisation was successful
_flags;
// internal variables
uint16_t _loop_rate; // rate in Hz at which output() function is called (normally 400hz)
uint16_t _speed_hz; // speed in hz to send updates to motors
float _roll_in; // desired roll control from attitude controllers, -1 ~ +1
float _roll_in_ff; // desired roll feed forward control from attitude controllers, -1 ~ +1
float _pitch_in; // desired pitch control from attitude controller, -1 ~ +1
float _pitch_in_ff; // desired pitch feed forward control from attitude controller, -1 ~ +1
float _yaw_in; // desired yaw control from attitude controller, -1 ~ +1
float _yaw_in_ff; // desired yaw feed forward control from attitude controller, -1 ~ +1
float _throttle_in; // last throttle input from set_throttle caller
float _throttle_out; // throttle after mixing is complete
float _forward_in; // last forward input from set_forward caller
float _lateral_in; // last lateral input from set_lateral caller
float _throttle_avg_max; // last throttle input from set_throttle_avg_max
LowPassFilterFloat _throttle_filter; // throttle input filter
DesiredSpoolState _spool_desired; // desired spool state
SpoolState _spool_state; // current spool mode
// air pressure compensation variables
float _air_density_ratio; // air density / sea level density - decreases in altitude
// mask of what channels need fast output
uint16_t _motor_fast_mask;
// pass through variables
float _roll_radio_passthrough; // roll input from pilot in -1 ~ +1 range. used for setup and providing servo feedback while landed
float _pitch_radio_passthrough; // pitch input from pilot in -1 ~ +1 range. used for setup and providing servo feedback while landed
float _throttle_radio_passthrough; // throttle/collective input from pilot in 0 ~ 1 range. used for setup and providing servo feedback while landed
float _yaw_radio_passthrough; // yaw input from pilot in -1 ~ +1 range. used for setup and providing servo feedback while landed
AP_Int8 _pwm_type; // PWM output type
// motor failure handling
bool _thrust_boost; // true if thrust boost is enabled to handle motor failure
bool _thrust_balanced; // true when output thrust is well balanced
float _thrust_boost_ratio; // choice between highest and second highest motor output for output mixing (0 ~ 1). Zero is normal operation
private:
static AP_Motors *_singleton;
;
namespace AP
AP_Motors *motors();
;
libraries\\AC_AttitudeControl\\AC_AttitudeControl.cpp
这个是APM飞控的姿态控制,这里面可以做到角度控制 并且包含了PID
代码过长 建议直接看源码 这里就不放了
如果想深入的去了解以下姿态控制的具体实现可以推荐看
ArduPilot姿态控制方法解析---(倾转分离)_Chasing的博客-CSDN博客_ardupilot姿态控制
大写的难!!!
最后我做了一个可以接收外部的串口数据控制无人机姿态的模式
注意!!
这里使用的是 APM的 uart2: 接口 不要弄错了
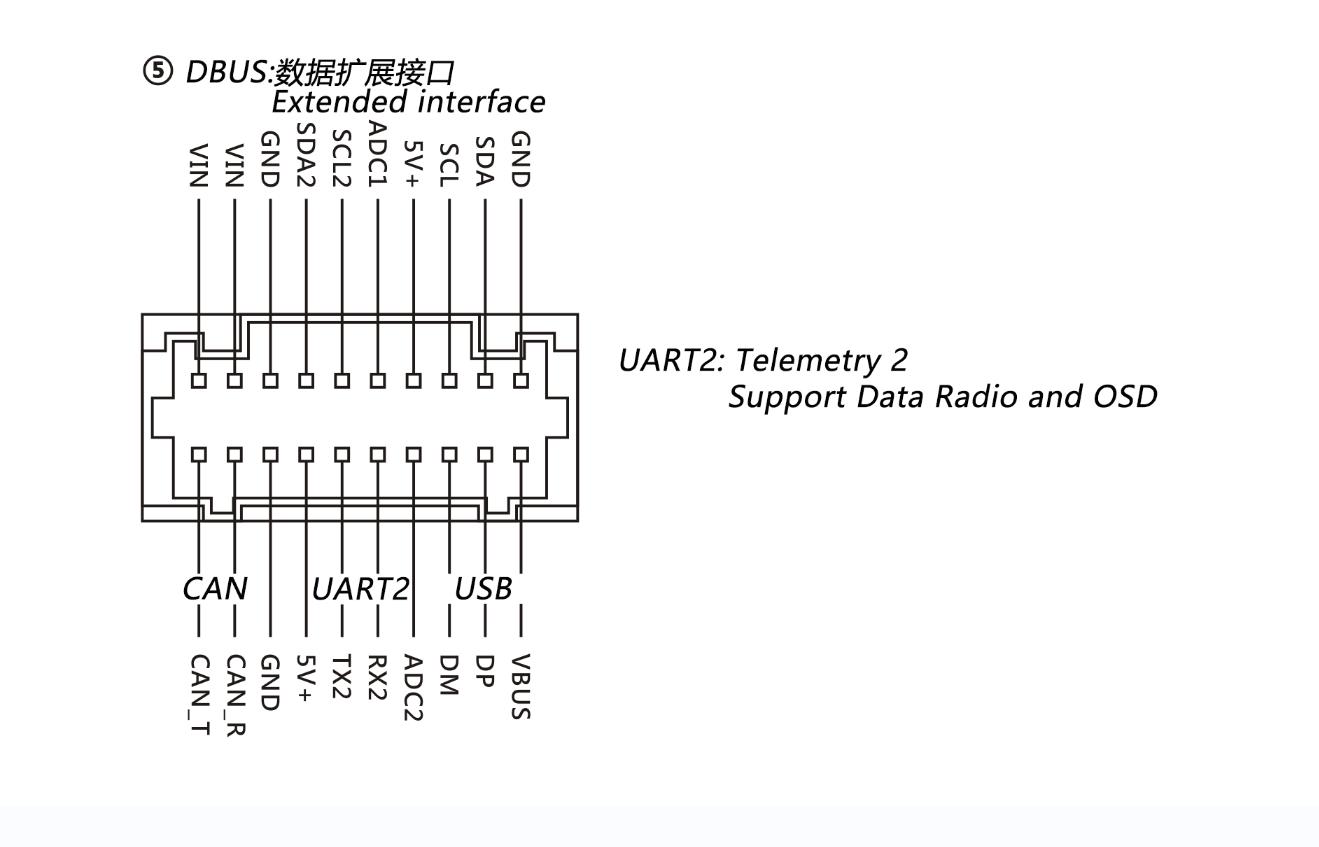
这里很重要
在刷完固件后
全部参数里!!
搜索MODE

具体参考Apm飞控学习笔记之添加我的飞行模式-Cxm_chen_taifu的博客-CSDN博客
然后拨动到相应的模式就可以启动了 自动执行串口接收的数据来进行飞行 (解锁流程保持不变)
控制协议如下

固件下载链接https://download.csdn.net/download/chen_taifu/84121612
以上是关于Apm飞控学习笔记-姿态控制-Cxm的主要内容,如果未能解决你的问题,请参考以下文章
Apm飞控学习笔记-AC_PosControl位置控制-Cxm