手术机器人软硬件设计方案
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了手术机器人软硬件设计方案相关的知识,希望对你有一定的参考价值。
嵌入式主手手柄需求
结构:
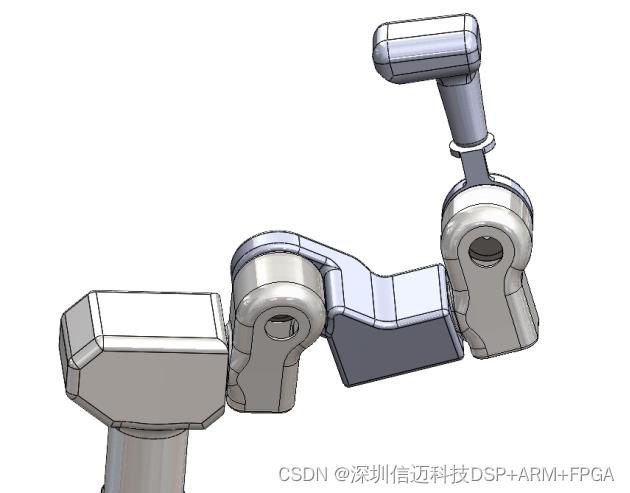
1、下述结构为操控手柄,用于采集人手运动信号,传递至上位机,对其他设备进行遥操控
12、手柄内含4个电机旋转副的主手手柄机械臂,内置16位分辨率旋转编码器记录角位移;
23、上位机连接主手手柄电机、从手器械电机(手柄输出运控控制的执行端)、台架电机(手柄控制的直线运动)、电刀主机(手柄控制实现开关控制)。
功能模块:
正向控制(手柄作为控制端):
控制主手手柄输出旋转编码器(5)角位移信号控制从手器械电机;
手柄按键:控制设备台架电机;
手柄按键:手柄电机主动抱闸及释放;
手柄按键控制电刀主机通电/断电;
二.反向控制(手柄受器械反馈控制)
主手手柄根据选定从手器械位姿调整位姿;
手柄按键:控制设备台架电机;
手柄按键:控制主手电机主动抱闸及释放;
手柄按键控制电刀主机通电/断电;
参数输入:
1、上位机通信协议:RS485/Eathercat
2、上位机系统:windows 7/10 后续可能转为Linux
3、旋转编码器分辨率:16位
4、电机输出信号:0:4-20mA RS485
需求实现:
阶段一:
分别将采集主手手柄旋转编码器角位移信号独立输出至上位机实现从手电机随主手旋转位移运行;
将从手电机旋转编码器角位移信号反馈至主手电机调整主手位姿;
将手柄前进/后退按键输入信号输出至上位机并控制台架电机运行;
监控悬停按键是否按下,将信号反馈给主手手柄电机实现主动抱闸/释放;
采集手柄电刀开关输入信号输出至上位机并控制外接电刀主机通电/断电;
监控手柄电机温度并反馈至上位机;
通过软件设置边界区域,限定手柄旋转位移范围;
阶段二:
实现器械电机随手柄旋转位移运行;
将器械电机旋转编码器角位移信号反馈至手柄电机调整手柄位姿;
ethercat运动控制器:采用imx8 +linux+xenomai+igh,高实时。


附:
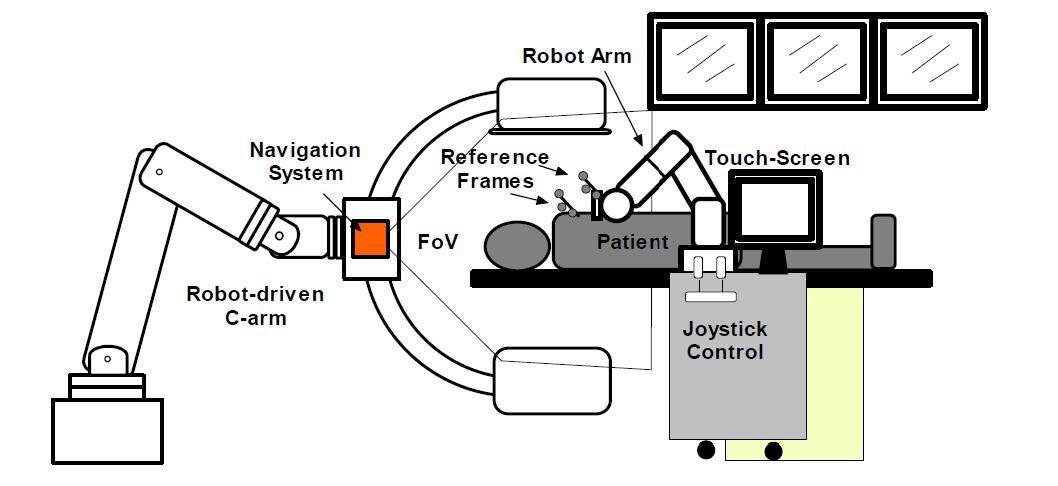
手术机器人一个很不错的文献:
【论文解读】手术机器人系统的工作原理分析与解读
以上是关于手术机器人软硬件设计方案的主要内容,如果未能解决你的问题,请参考以下文章
TMS320F2837x + Spartan6/国产FPGA低成本高实时注塑机运动控制器软硬件设计方案
历史上的今天:网景浏览器诞生;ENIAC 首席设计师出生;全球首例全机器人手术...
Valve输掉Steam手柄专利侵权案,支付400万美元赔偿