信息融合基于matlab BP神经网络和DS证据理论不确定性信息融合问题含Matlab源码 2112期
Posted 海神之光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了信息融合基于matlab BP神经网络和DS证据理论不确定性信息融合问题含Matlab源码 2112期相关的知识,希望对你有一定的参考价值。
一、 D-S证据理论及解释
证据理论由Dempster在1967年最初提出,并由他的学生Shafer改进推广使之成为符合有限离散领域中推理的形式,因此称为D-S理论。证据理论讨论一个“辨识框架”(Frame of Discernment)Θ,它是关于命题的相互独立的可能答案或假设的一个有限集合。按传统方法可以把Θ的幂集表示为2Θ,它是Θ的所有子集的集合。D-S证据理论对这个辨识框架进行运算,并提供计算幂集元素的逻辑,然后使用这些计算结果完成高和低的不确定性的计算工作。
定义1Θ为鉴别框架,由一完备的互不相容的陈述集合组成,Θ的幂集构成了命题集合。通过传感器信息得到的特征度量作为证据,并通过基本概率赋值函数对所有命题赋予一个可信度,基本概率赋值函数m则是满足下述两个条件的映射:2Θ→[0,1]。
(1)不可能事件基本概率数为0,即m(Φ)=0;
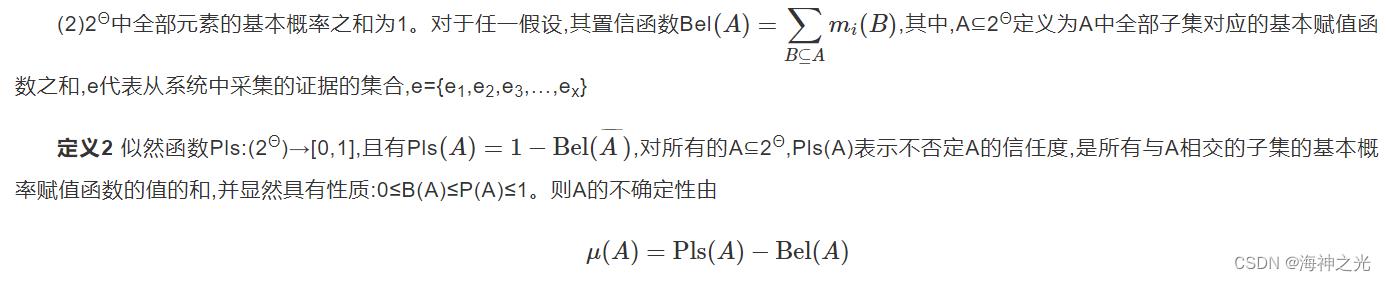
表示。它表示了既不信任A也不信任A¯¯¯的一种度量,可表示对不知道的度量。
1 证据理论在信息融合中的应用
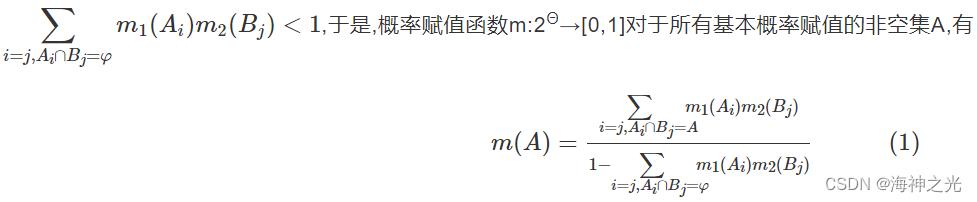
定义3 假设Bel1和Bel2是相同的框架2Θ上的信任函数,具有基本概率赋值函数m1和m2以及核A1,A2,…,An和B1,B2,…,Bn,并假设
定义4 假设Bel1,Bel2,…,Beln都是相同框架2Θ上的信任函数,则n个信任函数的组合可写成
(((Bel1⊕Bel2)⊕Bel3)⊕…)⊕Beln
式中⊕表示直和,有组合证据获得的最终证据在组合完成过程中与其次序无关,即满足结合率。
假定两个独立的证据源(传感器信息源)导出的基本概率赋值函数,则利用组合规则可以计算这两个证据共同作用下产生的基本概率赋值函数。
假定两个传感器同时反映对象为A,且
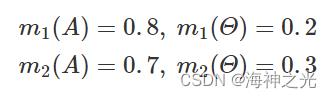
采用D-S规则进行组合,结果为
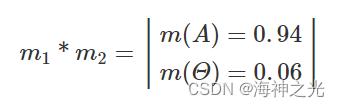
假设一个传感器支持对象A的程度为0.8,而另一个传感器支持的对象是B,程度为0.9,即
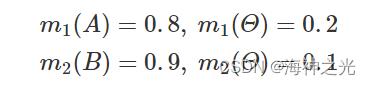
式中,对象A和对象B是相互排斥的描述,经过规则组合并规格化为和1并简化后得到
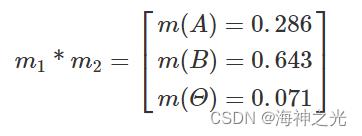
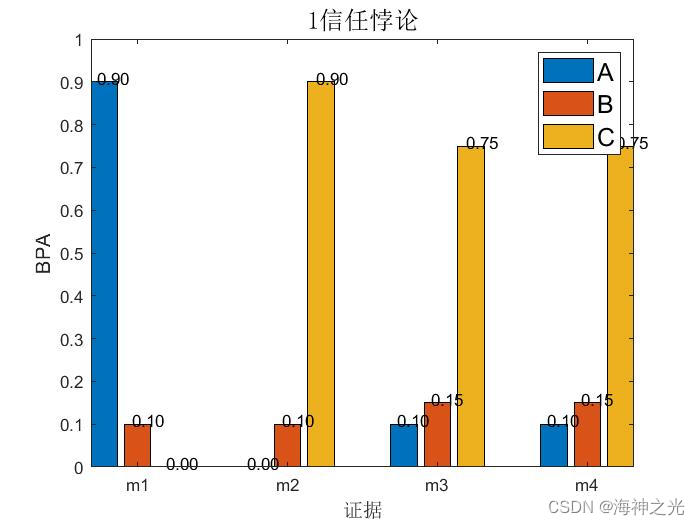
可以看出,信任程度低的对象报告影响了高信任度的对象报告。
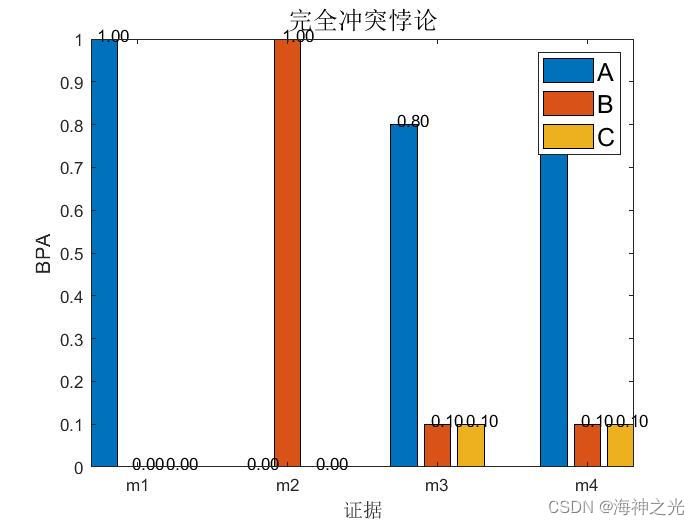
当m1(A)=1.0,m2(B)=1.0时,组合公式中的分母为零,D-S规则无法对其进行组合,也就是说,D-S规则无法处理完全不一致的证据。
二、部分源代码
function [M2,M3,M4] = Dengyong( m1,m2,m3,m4)
% 加权证据合成法
%两个证据的信息融合
%--------------------------------------------
n2=2;
d11=sqrt(0.5*(sum(m1.(2))+sum(m1.(2))-2sum(m1.m1)));
d12=sqrt(0.5(sum(m1.(2))+sum(m2.(2))-2sum(m1.m2)));
d22=sqrt(0.5(sum(m2.(2))+sum(m2.(2))-2*sum(m2.*m2)));
d21=d12;
DM=[d11 d12;d21 d22];
SM=ones(n2,n2)-DM;
sup=sum(SM’)-[SM(1,1) SM(2,2)]; %自己的
crd=sup/sum(sup);%可信度
m=[m1;m2];
M2=crd*m;
%--------------------------------------------
%三个证据的信息融合
%--------------------------------------------
n3=3;
d11=sqrt(0.5*(sum(m1.(2))+sum(m1.(2))-2sum(m1.m1)));
d12=sqrt(0.5(sum(m1.(2))+sum(m2.(2))-2sum(m1.m2)));
d13=sqrt(0.5(sum(m1.(2))+sum(m3.(2))-2sum(m1.m3)));
d22=sqrt(0.5(sum(m2.(2))+sum(m2.(2))-2sum(m2.m2)));
d21=d12;
d23=sqrt(0.5(sum(m2.(2))+sum(m3.(2))-2sum(m2.m3)));
d31=d13;
d32=d23;
d33=sqrt(0.5(sum(m3.(2))+sum(m3.(2))-2sum(m3.*m3)));
DM=[d11 d12 d13;d21 d22 d23;d31 d32 d33];
SM=ones(n3,n3)-DM;
sup=sum(SM’)-[SM(1,1) SM(2,2) SM(3,3) ]; %自己的
%sup=[sum(SM(1,2)+SM(1,3)) sum(SM(2,1)+SM(2,3)) sum(SM(3,1)+SM(3,2))];
crd=sup/sum(sup);%可信度
m=[m1;m2;m3];
M3=crd*m;
%M3=m.*m/sum(m.*m);
%--------------------------------------------
%四组证据的融合结果
%--------------------------------------------
n4=4;
d11=sqrt(0.5*(sum(m1.(2))+sum(m1.(2))-2sum(m1.m1)));
d12=sqrt(0.5(sum(m1.(2))+sum(m2.(2))-2sum(m1.m2)));
d13=sqrt(0.5(sum(m1.(2))+sum(m3.(2))-2sum(m1.m3)));
d14=sqrt(0.5(sum(m1.(2))+sum(m4.(2))-2sum(m1.m4)));
d22=sqrt(0.5(sum(m2.(2))+sum(m2.(2))-2sum(m2.m2)));
d23=sqrt(0.5(sum(m2.(2))+sum(m3.(2))-2sum(m2.m3)));
d24=sqrt(0.5(sum(m2.(2))+sum(m4.(2))-2sum(m2.m4)));
d33=sqrt(0.5(sum(m3.(2))+sum(m3.(2))-2sum(m3.m3)));
d34=sqrt(0.5(sum(m3.(2))+sum(m4.(2))-2sum(m3.m4)));
d44=sqrt(0.5(sum(m4.(2))+sum(m4.(2))-2sum(m4.*m4)));
d21=d12;
d31=d13;
d41=d14;
d32=d23;
d42=d24;
d43=d34;
DM=[d11 d12 d13 d14;d21 d22 d23 d24;d31 d32 d33 d34;d41 d42 d43 d44];
SM=ones(n4,n4)-DM;
sup=sum(SM’)-[SM(1,1) SM(2,2) SM(3,3) SM(4,4)]; %自己的
crd=sup/sum(sup);%可信度
m=[m1;m2;m3;m4];
M4=crd*m;
%M4=m.*m/sum(m.*m);
%--------------------------------------------
end
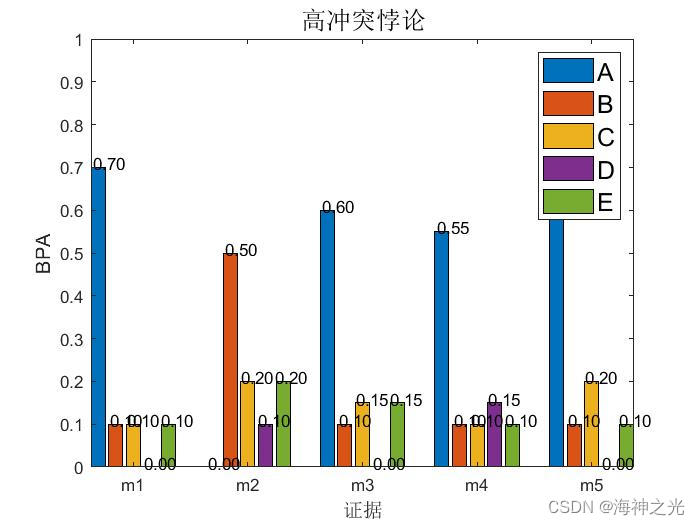
三、运行结果

四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]陈寅,林良明,颜国正.D-S证据推理在信息融合应用中的存在问题及改进[J].系统工程与电子技术. 2000,(11)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
以上是关于信息融合基于matlab BP神经网络和DS证据理论不确定性信息融合问题含Matlab源码 2112期的主要内容,如果未能解决你的问题,请参考以下文章
信息融合基于matlab BP神经网络和DS证据理论不确定性信息融合问题含Matlab源码 2204期
粮食温度预测基于matlab GA优化BP神经网络粮食温度预测研(多输入单输出)(含优化前的对比)含Matlab源码 2404期
基于BP神经网络/GRNN神经网络的电力预测matlab仿真
身份证识别基于matlab BP神经网络身份证号码识别含Matlab源码 1344期