keras-yolov3 + Kalman-Filter 进行人体多目标追踪(含代码)
Posted 悟乙己
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了keras-yolov3 + Kalman-Filter 进行人体多目标追踪(含代码)相关的知识,希望对你有一定的参考价值。
笔者最近在做新零售智慧门店的相关项目,主要涵盖人流量、人物活动区域轨迹等。那么本篇其实是笔者在实践过程中一个"失败"的案例,因为其应用复用在现实场景的时候效果非常差,所以只是当做练习题抛出来。本篇是受《YOLOv3目标检测、卡尔曼滤波、匈牙利匹配算法多目标追踪》启发,感谢这位作者!
笔者之前没有做过追踪领域的研究,了解的比较浅显,如果有小伙伴在这块儿有相同的困惑,或是已经有好的解决方案,欢迎留言讨论~
文章目录
1 yolov3 + Kalman filter 多目标跟踪
先来看一则图:

其中就是先定位到个人,然后对个人进行跟踪,这是来自项目:Smorodov/Multitarget-tracker的一则检测结果,看着很酷炫的样子。
那么,其中是一种比较简单的多目标追踪方式:detector+tracker,两者其实是相对独立的。
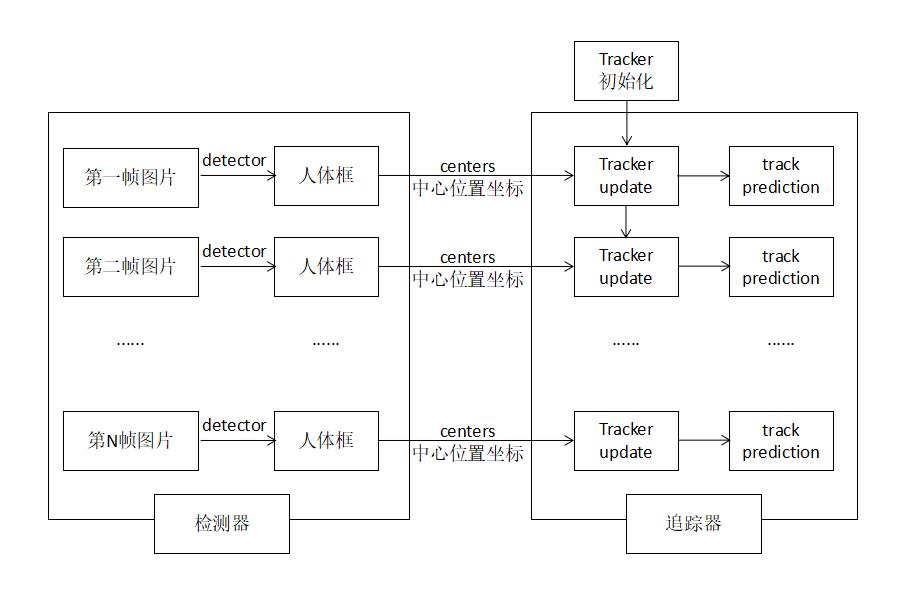
这是笔者画的一个草图,这里的流程就是,图片经过detector,得到人体坐标框,然后计算中心点位置centers(x0,y0),将该centers(x0,y0)输入给追踪器,追踪器去学习(Update)并给出预测。
其中每一帧的图,tracker都会给出多条轨迹,每条轨迹都可能由若干个点组成:
来看一下常规的update里面发生了什么?(简单贴一下)
# 第一段
cost = np.zeros(shape=(N, M)) # Cost matrix
for i in range(len(self.tracks)):
for j in range(len(detections)):
try:
diff = self.tracks[i].prediction - detections[j]
distance = np.sqrt(diff[0][0]*diff[0][0] +
diff[1][0]*diff[1][0])
cost[i][j] = distance
except:
pass
# 第二段
row_ind, col_ind = linear_sum_assignment(cost)
新的一帧物体中心点centers给入之后,tracker与给出预测值prediction ,同时预测值与实际detections的距离去迭代匈牙利算法匹配(linear_sum_assignment)。
当然这套算法好处是在,可以任意组合比较好的detector/tracker算法,项目Smorodov/Multitarget-tracker中就是Opencv中的 face detector + Kalman filter multitarget tracker。
笔者引用的是项目:srianant/kalman_filter_multi_object_tracking中的KF算法。
但是这一整套方法论有非常多的问题:
问题一:
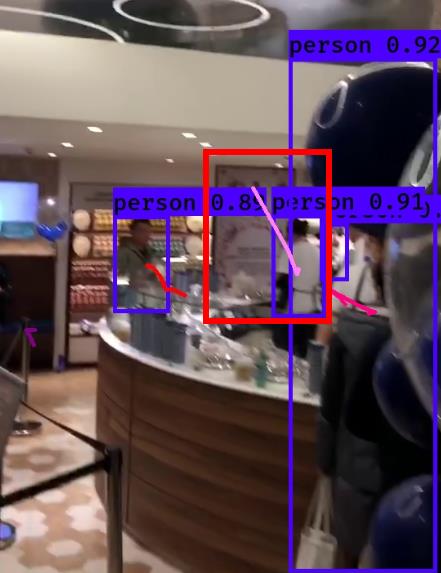
在刚刚检测到新人的时候,第一次轨迹预测的时候容易飘逸

来看一下上图中的笔者白色框给出的人体检测,一开始出现的时候,轨迹拉的非常长,这是一开始预测的时候还不够收敛的情况。
问题二:
one-stage算法的缺陷是不够稳定,笔者本项目尝试的是keras-yolov3,在开阔场景没问题,但是在一切人密度较大,遮挡物较多,像素不够高清的视频上发现检测器容易遗漏物体,前两帧可以检测,后面几帧断了,然后又续上了。这个时候,detector都出现问题,tracker当然会出现loss丢失掉之前的物体。
一些网友也提出过很多解决方案:
- (1)多帧融合;
- (2)在第一帧有物体的时候就用快速跟踪的手段取代检测器,雷达与物体bbox匹配。
2 keras-yolov3 + kalman filter的笔者的一些微调
2.1 KF算法微调
笔者引用的是项目:srianant/kalman_filter_multi_object_tracking中的KF算法。
笔者也针对上面提到的问题一进行了微调改进,修复了一下首次检测的物体给出的轨迹会“乱来”的情况。
那先从该项目的KF算法Tracker开始,项目中预设了几个调节选项:
- dist_thresh: distance threshold. When exceeds the threshold, track will be deleted and new track is created,距离阈值:超过阈值时,将删除轨迹并创建新轨迹
- max_frames_to_skip: maximum allowed frames to be skipped forthe track object undetected,超过多少帧没有识别,就放弃该物体,未检测到的跟踪对象允许跳过的最大帧数,可以设置小一些
- max_trace_lenght: trace path history length
- trackIdCount: identification of each track object,每个跟踪对象的标识基数(在此之上累加)
来看看修复问题的点是,红框标出的,首次检测的飘逸轨迹,那么飘逸轨迹的特点是首尾两点距离较远,那么通过计算两个端点欧式距离,并通过设定阈值来屏蔽掉一些飘逸轨迹。
其他的,如果观众想自行修改tracker,可参考该项目Kalman and Bayesian Filters in Python,把其中一些好的迁移过来。
2.2 keras-yolov3的detector微调
笔者之前的博客中:自有数据集上,如何用keras最简单训练YOLOv3目标检测就是用keras-yolov3训练yolov3模型,该项目也是有预训练模型,但是分类有80分类,不仅仅是定位到人的。所以,简单的只挑出人物框,计算中心值给入tracker即可。
当然,这里其他物体框还是保留的,只是对图像中的人物进行多目标跟踪。
3 keras-yolov3-KF的代码解析
笔者自己的实验环境:
keras - 2.1.5
tensorflow - 1.12.0
python - 3.6
笔者的项目链接:mattzheng/keras-yolov3-KF-objectTracking,重点可看:objectTracking_DEMO .ipynb文件。
那么笔者对keras-yolov3以及KF算法都进行一定修改。那么步骤变得简单一些:
- 加载keras yolov3 coco 预训练模型
- 解析
# 加载keras yolov3 coco预训练模型
yolo_test_args =
"model_path": 'model_data/yolo.h5',
"anchors_path": 'model_data/yolo_anchors.txt',
"classes_path": 'model_data/coco_classes.txt',
"score" : 0.3,
"iou" : 0.45,
"model_image_size" : (416, 416),
"gpu_num" : 1,
yolo_test = YOLO(**yolo_test_args)
其中yolo.h5是预训练模型,可以由yolo_weights.h5转化,笔者也提供一下转化之后的h5文件。
链接:https://pan.baidu.com/s/1ppQH_FEbYSHob2T7NQOVmg 提取码:e345
解析单帧图片为:
'''
解析方式一: 从视频保存成的图像文件中进行解析
先把视频-> 拆分成图像文件夹,在文件夹中逐帧解析
'''
tracker = Tracker(100, 8, 15, 100)
#for n in tqdm(range(100)):
image = Image.open('11.jpg')
r_image,out_boxes, out_scores, out_classes = yolo_test.detect_image(image)
centers,number = calc_center(out_boxes,out_classes,out_scores,score_limit = 0.5)
tracker,result = trackerDetection(tracker,r_image,centers,number,max_point_distance = 30,max_colors = 20,track_id_size = 2)
#misc.imsave('jpg2video/%s.jpg'%n, result)
plt.imshow(result)
可以看到,步骤为:
- 根据yolov3跑出结果
yolo_test.detect_image - 计算人物框的中心点
calc_center - 更新tracker,
trackerDetection
再来看看tracker里面的属性:
self.track_id = trackIdCount # identification of each track object
self.KF = KalmanFilter() # KF instance to track this object
self.prediction = np.asarray(prediction) # predicted centroids (x,y)
self.skipped_frames = 0 # number of frames skipped undetected
self.trace = [] # trace path
track_id每个追踪物体的标识;prediction预测下一个点;trace轨迹点。
>>> tracker.tracks[0].trace
>>>[array([[116.],
[491.]]), array([[135.],
[570.]]), array([[142.],
[597.]])]
>>>tracker.tracks[0].track_id
>>>100
>>>tracker.tracks[0].prediction
>>>array([[116.],
[491.]])
以上是关于keras-yolov3 + Kalman-Filter 进行人体多目标追踪(含代码)的主要内容,如果未能解决你的问题,请参考以下文章
keras上的多GPU训练错误(OOM)(足够的内存,可能是配置问题)