基于libmodbus库实现modbus TCP/RTU通信
Posted tutu-hu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于libmodbus库实现modbus TCP/RTU通信相关的知识,希望对你有一定的参考价值。
文章目录
一.modbus TCP
Modbus由MODICON公司于1979年开发,是一种工业现场总线协议标准。1996年施耐德公司推出基于以太网TCP/IP的Modbus协议:ModbusTCP。
Modbus协议是一项应用层报文传输协议,包括ASCII、RTU、TCP三种报文类型。
标准的Modbus协议物理层接口有RS232、RS422、RS485和以太网(modbus TCP)接口,采用master/slave方式通信。
ModbusTCP数据帧:
ModbusTCP的数据帧可分为两部分:MBAP+PDU。
1.1 报文头MBAP
MBAP为报文头,长度为7字节,组成如下:

| 内容 | 解释 |
|---|---|
| 事务处理标识 | 可以理解为报文的序列号,一般每次通信之后就要加1以区别不同的通信数据报文 |
| 协议标识符 | 00 00表示ModbusTCP协议 |
| 长度 | 表示接下来的数据长度,单位为字节 |
| 单元标识符 | 可以理解为设备地址 |
比如一帧modbus TCP报文如下:00 01 00 00 00 06 01 06 08 00 12 34
其中前7个字节(标红的部分)为报文头MBAP。
1.2 帧结构PDU
PDU由功能码+数据组成。功能码为1字节,数据长度不定,由具体功能决定。
功能码:
Modbus的操作对象有四种:线圈、离散输入、保持寄存器、输入寄存器。

PDU详细结构:
1. 0x01:读线圈状态
在从站中读1~2000个连续线圈状态,ON=1,OFF=0
请求:MBAP 功能码 起始地址H 起始地址L 数量H 数量L(共12字节)
响应:MBAP 功能码 数据长度 数据(一个地址的数据为1位)
如:在从站0x01中,读取开始地址为0x0002的线圈数据,读0x0008位
00 01 00 00 00 06 01 01 00 02 00 08
回:数据长度为0x01个字节,数据为0x01,第一个线圈为ON,其余为OFF
00 01 00 00 00 04 01 01 01 01
2. 0x02:读离散量输入
从一个从站中读1~2000个连续的离散量输入状态
请求:MBAP 功能码 起始地址H 起始地址L 数量H 数量L(共12字节)
响应:MBAP 功能码 数据长度 数据(长度:9+ceil(数量/8))
如:从地址0x0000开始读0x0012个离散量输入
00 01 00 00 00 06 01 02 00 00 00 12
回:数据长度为0x03个字节,数据为0x01 04 00,表示第一个离散量输入和第11个离散量输入为ON,其余为OFF
00 01 00 00 00 06 01 02 03 01 04 00
3. 0x03:读保持寄存器
从远程设备中读保持寄存器连续块的内容
请求:MBAP 功能码 起始地址H 起始地址L 寄存器数量H 寄存器数量L(共12字节)
响应:MBAP 功能码 数据长度 寄存器数据(长度:9+寄存器数量×2)
如:起始地址是0x0000,寄存器数量是 0x0003
00 01 00 00 00 06 01 03 00 00 00 03
回:数据长度为0x06,第一个寄存器的数据为0x21,其余为0x00
00 01 00 00 00 09 01 03 06 00 21 00 00 00 00
4. 0x04:读输入寄存器
从一个远程设备中读1~2000个连续输入寄存器
请求:MBAP 功能码 起始地址H 起始地址L 寄存器数量H 寄存器数量L(共12字节)
响应:MBAP 功能码 数据长度 寄存器数据(长度:9+寄存器数量×2)
如:读起始地址为0x0002,数量为0x0005的寄存器数据
00 01 00 00 00 06 01 04 00 02 00 05
回:数据长度为0x0A,第一个寄存器的数据为0x0c,其余为0x00
00 01 00 00 00 0D 01 04 0A 00 0C 00 00 00 00 00 00 00 00
5. 0x05:写单个线圈
将从站中的一个输出写成ON或OFF,0xFF00请求输出为ON,0x000请求输出为OFF
请求:MBAP 功能码 输出地址H 输出地址L 输出值H 输出值L(共12字节)
响应:MBAP 功能码 输出地址H 输出地址L 输出值H 输出值L(共12字节)
如:将地址为0x0003的线圈设为ON
00 01 00 00 00 06 01 05 00 03 FF 00
回:写入成功
00 01 00 00 00 06 01 05 00 03 FF 00
6. 0x06:写单个保持寄存器
在一个远程设备中写一个保持寄存器
请求:MBAP 功能码 寄存器地址H 寄存器地址L 寄存器值H 寄存器值L(共12字节)
响应:MBAP 功能码 寄存器地址H 寄存器地址L 寄存器值H 寄存器值L(共12字节)
如:向地址是0x0000的寄存器写入数据0x000A
00 01 00 00 00 06 01 06 00 00 00 0A
回:写入成功
00 01 00 00 00 06 01 06 00 00 00 0A
7. 0x0F(15):写多个线圈
将一个从站中的一个线圈序列的每个线圈都强制为ON或OFF,数据域中置1的位请求相应输出位ON,置0的位请求响应输出为OFF
请求:MBAP 功能码 起始地址H 起始地址L 输出数量H 输出数量L 字节长度 输出值H 输出值L
响应:MBAP 功能码 起始地址H 起始地址L 输出数量H 输出数量L
8. 0x10(16):写多个保持寄存器
在一个远程设备中写连续寄存器块(1~123个寄存器)
请求:MBAP 功能码 起始地址H 起始地址L 寄存器数量H 寄存器数量L 字节长度 寄存器值(13+寄存器数量×2)
响应:MBAP 功能码 起始地址H 起始地址L 寄存器数量H 寄存器数量L(共12字节)
如:向起始地址为0x0000,数量为0x0001的寄存器写入数据,数据长度为0x02,数据为0x000F
00 01 00 00 00 09 01 10 00 00 00 01 02 00 0F
回:写入成功
00 01 00 00 00 06 01 10 00 00 00 01
1.3 库函数调用
下面的函数分别实现了上述的八种功能,并给出了发送的数据格式:
modbus_t *mb; //modbus_t
uint8_t read_buffer[1024]; //定义read_buffer
uint8_t write_buffer[1024]; //定义write_buffer
uint16_t read_buffer_16[1024]; //定义read_buffer_16
uint16_t write_buffer_16[1024]; //定义write_buffer_16
modbus_read_bits(mb, 0x6789, 5, read_buffer); //0x01:读线圈状态: 00 01 00 00 00 06 01 01 67 89 00 05
modbus_read_input_bits(mb, 0x6789, 5, read_buffer); //0x02:读离散量输入: 00 01 00 00 00 06 01 02 67 89 00 05
modbus_read_registers(mb, 0x6789, 5, read_buffer_16); //0x03:读保持寄存器: 00 01 00 00 00 06 01 03 67 89 00 05
modbus_read_input_registers(mb, 0x6789, 5, read_buffer_16);//0x04:读输入寄存器: 00 01 00 00 00 06 01 04 67 89 00 05
modbus_write_bit(mb, 0x6789, 0x1234); //0x05:写单个线圈: 00 01 00 00 00 06 01 05 67 89 FF 00
modbus_write_register(mb, 0x6789, 0x1234); //0x06:写单个保持寄存器: 00 01 00 00 00 06 01 06 67 89 12 34
modbus_write_bits(mb, 0x6789, 5, write_buffer); //0x0F(15):写多个线圈: 00 01 00 00 00 08 01 0F 67 89 00 05 01 1F
modbus_write_registers(mb, 0x6789, 5, write_buffer_16); //0x10(16):写多个保持寄存器: 00 01 00 00 00 11 01 10 67 89 00 05 0A 00 00 00 00 00 00 00 00 00 05
1.4 写成基类封装基础功能
为了方便其他客户端的调用,此处将上述的功能实现封装成一个基类,在基类中实现上述8中读写操作,当客户端需要调用Modbus功能时只需继承上述基类,并拓展相关功能函数即可,简单易用。下面给出了modbus_tcp.hpp和modbus_tcp.cpp程序。
modbus_tcp.hpp
/**
* @brief modbus tcp base class
*/
#ifndef __MODBUS_TCP_HPP__
#define __MODBUS_TCP_HPP__
#include <chrono>
#include <string>
#include "modbus/modbus.h"
namespace modbus
/**
* modbus_tcp base class
*/
class modbus_tcp
public:
/**
* @brief Constructor
* @throw @ref std::runtime_error() on gripper modbus communication failure
*
* @param[in] ip The modbus ip of gripper
* @param[in] port The modbus tcp port of gripper
*/
modbus_tcp(const std::string& ip, const short port);
~modbus_tcp();
//! libmodbus's error return value
static constexpr int MODBUS_ERR = -1;
//0x01:读线圈状态: 00 01 00 00 00 06 01 01 67 89 00 05
int read_coil_status(int addr, int nb, uint8_t *dest);
//0x02:读离散量输入: 00 01 00 00 00 06 01 02 67 89 00 05
int read_input_status(int addr, int nb, uint8_t *dest);
//0x03:读保持寄存器: 00 01 00 00 00 06 01 03 67 89 00 05
int read_holding_register(int addr, int nb, uint16_t *dest);
//0x04:读输入寄存器: 00 01 00 00 00 06 01 04 67 89 00 05
int read_input_register(int addr, int nb, uint16_t *dest);
//0x05:写单个线圈: 00 01 00 00 00 06 01 05 67 89 FF 00
int write_single_coil(int coil_addr, int status);
//0x06:写单个保持寄存器: 00 01 00 00 00 06 01 06 67 89 12 34
int write_single_register(int reg_addr, const uint16_t value);
//0x0F(15):写多个线圈: 00 01 00 00 00 08 01 0F 67 89 00 05 01 1F
int write_multiple_coil(int addr, int nb, const uint8_t *data);
//0x10(16):写多个保持寄存器: 00 01 00 00 00 11 01 10 67 89 00 05 0A 00 00 00 00 00 00 00 00 00 05
int write_multiple_registers(int addr, int nb, const uint16_t *data);
private:
modbus_t* ctx_;
;
// namespace modbus
#endif
modbus_tcp.cpp
#include <stdexcept>
#include <iostream>
#include "modbus_tcp.hpp"
namespace modbus
// modbus_tcp构造函数
modbus_tcp::modbus_tcp(const std::string& ip, const short port)
: ctx_(modbus_new_tcp(ip.c_str(), port))
if (MODBUS_ERR == modbus_set_slave(ctx_, 1) //
|| MODBUS_ERR == modbus_set_response_timeout(ctx_, 0, 1000 * 100) //!< [100ms],注意,此处的响应延时需要根据实际情况设定!!!
|| MODBUS_ERR == modbus_connect(ctx_)) //
modbus_free(ctx_);
throw std::runtime_error("modbus_tcp init or connect failed");
;
std::cout<<"modbus_tcp构造函数调用"<<std::endl;
// modbus_tcp析构函数
modbus_tcp::~modbus_tcp()
modbus_close(ctx_);
modbus_free(ctx_);
std::cout<<"modbus_tcp析构函数调用"<<std::endl;
//0x01:读线圈状态: 00 01 00 00 00 06 01 01 67 89 00 05
int modbus_tcp::read_coil_status(int addr, int nb, uint8_t *dest)
return modbus_read_bits(ctx_, addr, nb, dest); // return the number of read bits if successful. Otherwise it shall return -1 and set errno.
//0x02:读离散量输入: 00 01 00 00 00 06 01 02 67 89 00 05
int modbus_tcp::read_input_status(int addr, int nb, uint8_t *dest)
return modbus_read_input_bits(ctx_, addr, nb, dest); // return the number of read input status if successful. Otherwise it shall return -1 and set errno.
//0x03:读保持寄存器: 00 01 00 00 00 06 01 03 67 89 00 05
int modbus_tcp::read_holding_register(int addr, int nb, uint16_t *dest)
return modbus_read_registers(ctx_, addr, nb, dest); //成功时返回读取输入位的数目即nb,失败时返回-1.
//0x04:读输入寄存器: 00 01 00 00 00 06 01 04 67 89 00 05
int modbus_tcp::read_input_register(int addr, int nb, uint16_t *dest)
return modbus_read_input_registers(ctx_, addr, nb, dest); //return the number of read input registers if successful. Otherwise it shall return -1 and set errno.
//0x05:写单个线圈: 00 01 00 00 00 06 01 05 67 89 FF 00
int modbus_tcp::write_single_coil(int coil_addr, int status)
return modbus_write_bit(ctx_, coil_addr, status); //成功时,返回1;失败时,返回-1。
//0x06:写单个保持寄存器: 00 01 00 00 00 06 01 06 67 89 12 34
int modbus_tcp::write_single_register(int reg_addr, const uint16_t value)
return modbus_write_register(ctx_, reg_addr, value); //成功时返回1,失败时返回-1.
//0x0F(15):写多个线圈: 00 01 00 00 00 08 01 0F 67 89 00 05 01 1F
int modbus_tcp::write_multiple_coil(int addr, int nb, const uint8_t *data)
return modbus_write_bits(ctx_, addr, nb, data); //return the number of written bits if successful. Otherwise it shall return -1 and set errno.
//0x10(16):写多个保持寄存器: 00 01 00 00 00 11 01 10 67 89 00 05 0A 00 00 00 00 00 00 00 00 00 05
int modbus_tcp::write_multiple_registers(int addr, int nb, const uint16_t *data)
return modbus_write_registers(ctx_, addr, nb, data); //成功时返回写入寄存器个数即nb,失败时返回-1.
// namespace modbus
main.cpp
#include "modbus_tcp.hpp"
int main(int argc, char *argv[])
uint8_t read_buffer[1024];
uint8_t write_buffer[1024];
uint16_t read_buffer_16[3];
uint16_t write_buffer_16[1024];
modbus::modbus_tcp modbus("192.168.2.128",8080); //创建一个modbus_tcp对象
modbus.read_coil_status(0x6789, 5, read_buffer);//00 01 00 00 00 06 01 01 67 89 00 05
modbus.read_input_status(0x6789, 5, read_buffer);//00 01 00 00 00 06 01 01 67 89 00 05
modbus.read_holding_register(0x6789, 5, read_buffer_16);//00 01 00 00 00 06 01 01 67 89 00 05
modbus.read_input_register(0x6789, 5, read_buffer_16);//00 01 00 00 00 06 01 04 67 89 00 05
modbus.write_single_coil(0x6789, 0x1234);
modbus.write_single_register(0x6789, 0x1234);//0x06:写单个保持寄存器: 00 01 00 00 00 06 01 06 67 89 12 34
modbus.write_multiple_coil(0x6789, 5, write_buffer);//0x0F(15):写多个线圈: 00 01 00 00 00 08 01 0F 67 89 00 05 01 1F
modbus.write_multiple_registers(0x6789, 5, write_buffer_16); //0x10(16):写多个保持寄存器: 00 01 00 00 00 11 01 10 67 89 00 05 0A 00 00 00 00 00 00 00 00 00 05
编译 & 执行:
g++ main.cpp modbus_tcp.cpp -lmodbus -std=c++17
./a.out
输出结果:

二.modbus RTU
在一般工业场景使用modbus RTU的场景还是更多一些,modbus RTU基于串行协议进行手法数据,包括RS232/485等工业总线协议。与modbus TCP不同的是RTU没有报文头MBAP字段,但是在尾部增加了两个CRC检验字节(CRC16),因为网络协议中自带校验,所以在TCP协议中不需要使用CRC校验码。RTU和TCP的总体使用方法基本一致,只是在创建modbus对象时有所不同,TCP需要传入网络socket信息;而RTU需要传入串口相关信息。
2.1 使用示例
当需要向某个从机寄存器写入某个值时,如向01地址的设备,0x0105保持寄存器写入1个数据:0x0190为例,那么需要构建这样一个数据帧:
主机发送:01 06 01 05 01 90 99 CB
01表示从机地址,06功能码表示写单个保持寄存器,0105表示寄存器地址,0190表示写入寄存器的数值,99 CB为CRC校验值。
如果从机正确的收到了数据,会回复一个数据帧:
从机回复:01 06 01 05 01 90 99 CB
所以作为主机,写数据的流程是:
- 构建一个Modbus-RTU数据帧
- 等待从机响应的数据
- 如果响应数据正确,说明写入成功,否则写入失败。
2.2 写成基类封装基础功能
为了方便其他客户端的调用,此处将上述的功能实现封装成一个基类,在基类中实现上述8中读写操作,当客户端需要调用Modbus功能时只需继承上述基类,并拓展相关功能函数即可,简单易用。下面给出了modbus_rtu.hpp和modbus_rtu.cpp程序。
modbus_rtu.hpp
/**
* @brief modbus rtu base class
*/
#ifndef __MODBUS_RTU_HPP__
#define __MODBUS_RTU_HPP__
#include <chrono>
#include <string>
#include "modbus/modbus.h"
namespace modbus
/**
* modbus_rtu base class
*/
class modbus_rtu
public:
/**
* @brief Constructor
* @throw @ref std::runtime_error() on gripper modbus communication failure
*
* @param[in] ip The modbus ip of gripper
* @param[in] port The modbus rtu port of gripper
*/
modbus_rtu( const std::string& device, //串口设备,类似于:"/dev/ttyUSB0"
int baud, //波特率:9600 115200等等
char parity, //奇偶校验位:通常设置为'N'
int data_bit, //数据位:通常设置为8
int stop_bit //停止位:通常设置为1
);
~modbus_rtu();
//! libmodbus's error return value
static constexpr int MODBUS_ERR = -1;
//0x01:读线圈状态: 00 01 00 00 00 06 01 01 67 89 00 05
int read_coil_status(int addr, int nb, uint8_t *dest);
//0x02:读离散量输入: 00 01 00 00 00 06 01 02 67 89 00 05
int read_input_status(int addr, int nb, uint8_t *dest);
//0x03:读保持寄存器: 00 01 00 00 00 06 01 03 67 89 00 05
int read_holding_register(int addr, int nb, uint16_t *dest);
//0x04:读输入寄存器: 00 01 00 00 00 06 01 04 67 89 00 05
int read_input_register(int addr, int nb, uint16_t *dest);
//0x05:写单个线圈: 00 01 00 00 00 06 01 05 67 89 FF 00
int write_single_coil(int coil_addr, int status);
//0x06:写单个保持寄存器: 00 01 00 00 00 06 01 06 67 89 12 34
int write_single_register(int reg_addr, const uint16_t value);
//0x0F(15):写多个线圈: 00 01 00 00 00 08 01 0F 67 89 00 05 01 1F
int write_multiple_coil(int addr, int nb, const uint8_t *data);
//0x10(16):写多个保持寄存器: 00 01 00 00 00 11 01 10 67 89 00 05 0A 00 00 00 00 00 00 00 00 00 05
int write_multiple_registers(int addr, int nb, const uint16_t *data);
private:
modbus_t* ctx_;
;
// namespace modbus
#endif
modbus_rtu.cpp
#include <stdexcept>
#include <iostream>
#include "modbus_rtu.hpp"
namespace modbus
// modbus_rtu构造函数
modbus_rtu::modbus_rtu( const std::string& device, //串口设备,类似于:"/dev/ttyUSB0"
int baud, //波特率:9600 115200等等
char parity, //奇偶校验位:通常设置为'N'
int data_bit, //数据位:通常设置为8
int stop_bit) //停止位:通常设置为1
: ctx_(modbus_new_rtu(device.c_str(), baud,parity,data_bit,stop_bit))
if (MODBUS_ERR == modbus_set_slave(ctx_, 1) //
|| MODBUS_ERR == modbus_set_response_timeout(ctx_, 0, 1000 * 100) //!< [100ms],注意,此处的响应延时需要根据实际情况设定!!!
|| MODBUS_ERR == modbus_connect(ctx_)) //
modbus_free(ctx_);
throw std::runtime_error("modbus_rtu init or connect failed");
;
std::cout<<"modbus_rtu构造函数调用"<<std::endl;
// modbus_rtu析构函数
modbus_rtu::~modbus_rtu()
modbus_close(ctx_);
modbus_free(ctx_);
std::cout<<"modbus_rtu析构函数调用"<<std::endl;
//0x01:读线圈状态: 00 01 00 00 00 06 01 01 67 89 00 05
int modbus_rtu::read_coil_status(int addr, int nb, uint8_t *dest)
return modbus_read_bits(ctx_, addr, nb, dest); // return the number of read bits if successful. Otherwise it shall return -1 and set errno.
//0x02:读离散量输入: 00 01 00 00 00 06 01 02 67 89 00 05
int modbus_rtu::read_input_status(int addr, int nb, uint8_t *dest)
return modbus_read_input_bits(ctx_, addr, nb, dest); // return the number of read input status if successful. Otherwise it shall return -1 and set errno.
//0x03:读保持寄存器: 00 01 00 00 00 06 01 03 67 89 00 05
int modbus_rtu::read_holding_register(int addr, int nb, uint16_t *dest)
return modbus_read_registers(ctx_, addr, nb, dest); //成功时返回读取输入位的数目即nb,失败时返回-1.
//0x04:读输入寄存器: 00 01 00 00 00 06 01 04 67 89 00 05
int modbus_rtu::read_input_register(int addr, int nb, uint16_t *dest)
return modbus_read_input_registers(ctx_, addr, nb, dest); //return the number of read input registers if successful. Otherwise it shall return -1 and set errno.
//0x05:写单个线圈: 00 01 00 00 00 06 01 05 67 89 FF 00
int modbus_rtu::嵌入式Libmodbus下载和编译详解
00. 目录
01. Modbus开源库概述
Modbus作为一种常见的工业通信协议,几乎被所有的设备在支持,如果能在软件或者设备中增强Modbus的通信功能,无疑对于市场应用来说是个很吸引人的。对于Modbus开发来说,网络上存在很多的开源库。其中libmodbus和freemobus非常常见,值得开发者认真分析和学习。
02. Libmodbus下载
libmodbus库适用于Linux,Mac OS X,FreeBSD,QNX和Win32的Modbus库。
libmodbus是一个免费软件库,可根据Modbus协议发送/接收数据。该库用C编写,并支持RTU(串行)和TCP(以太网)通信。
libmodbus的许可证为LGPL v2.1。
源码下载:https://github.com/stephane/libmodbus
官网下载:https://libmodbus.org/download/
03. Libmodbus源码结构
3.1 源码下载完毕之后,解压,简单查看源代码目录的构成
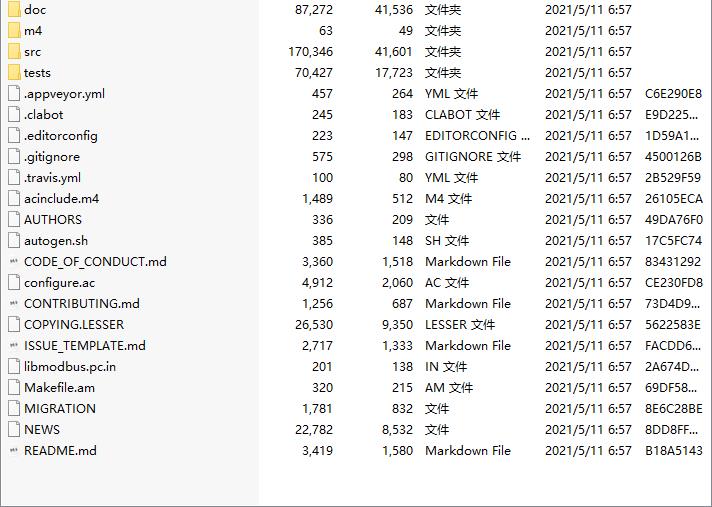
doc目录:libmodbus库的各API接口说明文档。
m4目录:存放GNU m4文件,在这里对理解代码没有意义。
src目录:全部libmodbus源文件
tests目录:包含自带的测试代码
其它文件对我们理解源代码关系不大,可以暂时忽略。
3.2 src目录内容
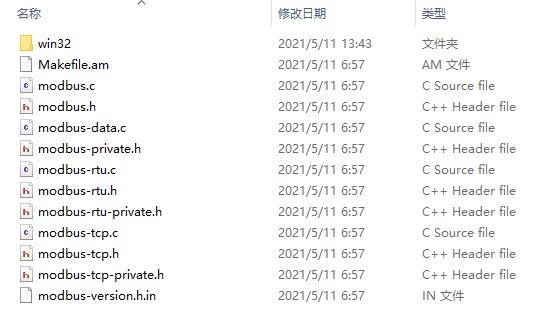
win32:定了在Windows下使用Visual Studio编译时的项目文件和工程文件,以及相关配置选项等。
Makefile.am:Makefile.am是Linux下AutoTool编译时读取相关编译参数的配置文件,用于生成Makefile文件,因用于Linux下开发,在这里暂时忽略。
源码文件描述:
mudbus.c 核心文件,试了Modbus协议层,定了通用的Modbus消息发送和接收函数、各功能码对应的函数。
modbus.h libmodbus对外接口API头文件
modbus-data.c 数据处理的通用函数,包括大小端相关的字节、位交换等函数。
modbus-private.h libmodbus内部使用的数据结构和函数定义
modbus-rtu.c 通信层协议,RTU模式相关的函数定义,主要是串口的设置、连接和消息的发送、接收等等
modbus-rtu.h RTU模式对外提供的API定义
modbus-rtu-private.h RTU模式的私有定义
modbus-tcp.c 通信层实现,TCP模式下相关函数的定义、主要包括TCP/IP网络的设置、连接、消息的发送和接收等等。
modbus-tcp.h 定义TCP模式度外提供的各API定义
modbus-tcp-private.h TCP模式的私有定义
modbus-version.h.in 版本定义文件
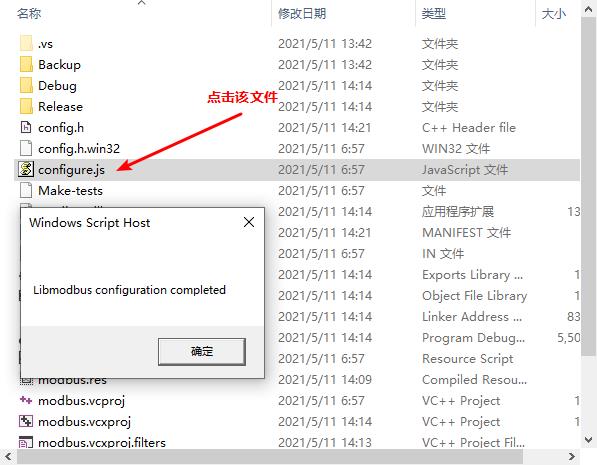
04. Visual Studio2019编译Libmodbus源码
4.1 双击configure.js,生成config.h和modbus-version.h文件
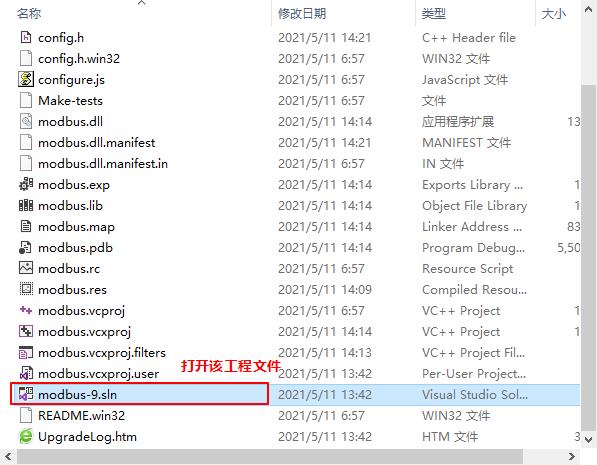
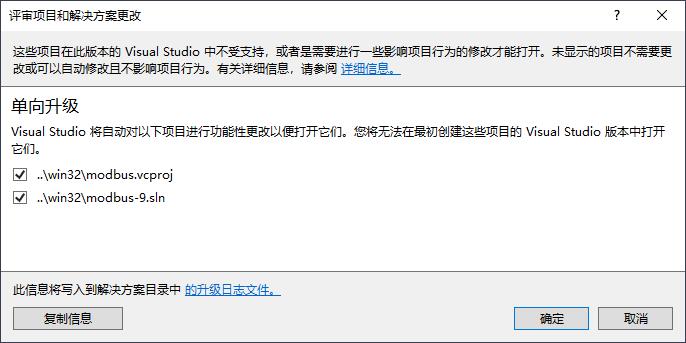
4.2 使用Visual Studio2019打开工程文件
4.3 项目文件升级对话框,选择确定
4.4 编译工程文件,发生编译错误。

原因是新生成的modbus-version.h文件没有正确加载,先移除该文件,然后再添加该文件
按下Alt + F7弹出项目属性设置对话框,依次找到如下选项
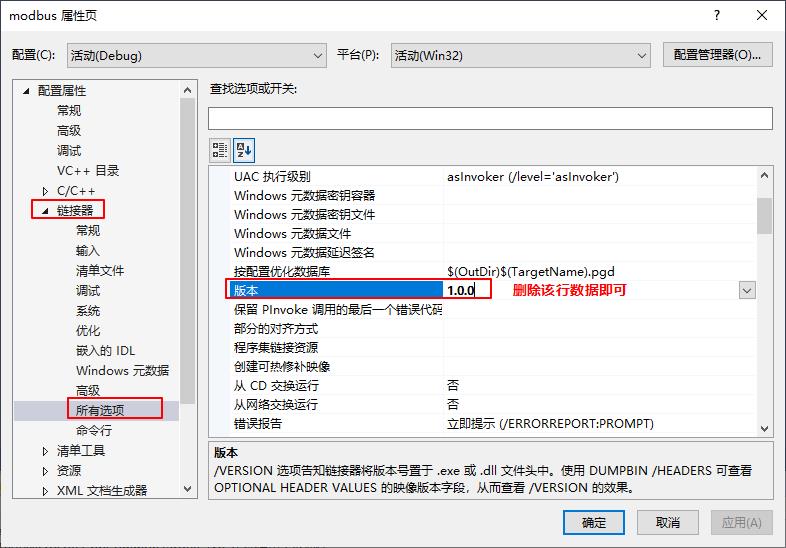
再次编译,显示编程成功,生成对应的动态库。

05. 附录
Libmodbus官方网站:https://libmodbus.org/
Freemodbus官方网站:https://www.embedded-experts.at/en/freemodbus/about/
以上是关于基于libmodbus库实现modbus TCP/RTU通信的主要内容,如果未能解决你的问题,请参考以下文章