用PID和Arduino,怎么让小车走直线,自动同步左右轮胎的速度?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了用PID和Arduino,怎么让小车走直线,自动同步左右轮胎的速度?相关的知识,希望对你有一定的参考价值。
模拟汽车牵引力控制系统
原理是当一个轮子速度改变(可能是外力或者其他因素)另外一个轮子跟着改变 以达到走直线的目的
需要哪些配件?大神请分享下代码 感谢!
1 能够通过传感器或者通过检测电机的电流 得到 轮子的状态: “ 一个轮子速度改变” 这个需要具体的检测到数据
或者
2 能够检测到 直线 ,然后改变控制算法
总之 这个是需要传感的 ,单纯的算法解决不了这个问题 参考技术A 是用单片机实物控制还是软件仿真?追问
用的arduino软件加encoder motor,还需要电阻什么的吗?还是直接连arduino pwm端?
追答没玩过你说的arduino
但是PWM是可调占空比的方波应当是控制电机转速的
而encoder motor是速度反馈端
通过反馈端获取当前轮子速度然后通过调节pwm占空比始轮子到达预期转速即可
基于PID的智能小车循迹控制
1、内容简介
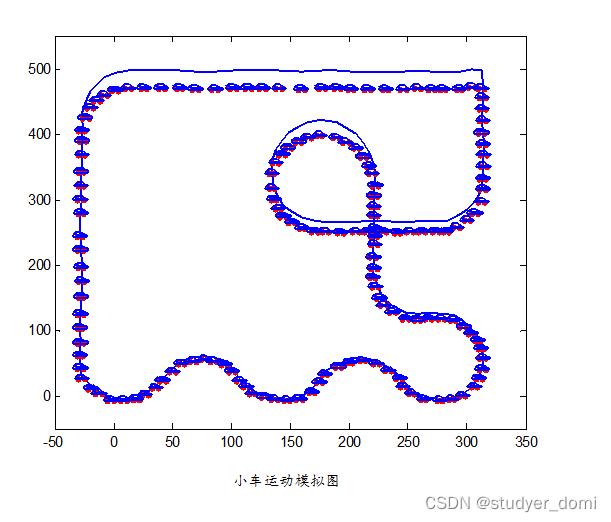
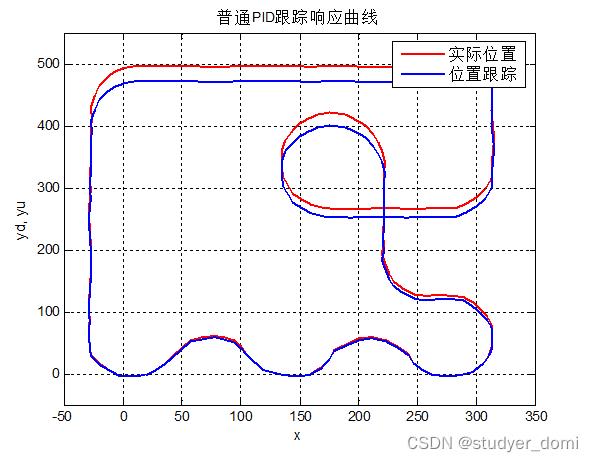
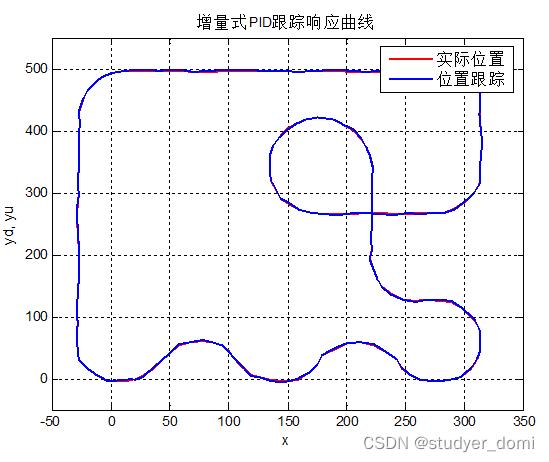
随着计算机技术,控制技术和信息技术的飞速发展,智能化已经成为时代发展的需要。在柔性自动化生产线,智能仓储管理及物流配送等领域,当生产现场环境恶劣时,人工不能完成的任务,如物料运输和装卸等,可采用智能寻迹小车完成相应的任务。基于生产现场和日常生活的实际需求,研究开发智能小车循迹系统具有十分重要的意义。本文是基于改进PID控制算法的智能小车循迹控制系统,利用MATLAB软件来实现智能小车的轨迹控制,基于给定的车辆行驶轨迹,采用标准PID算法和改进的PID控制算法输出位置变量,实现控制跟踪。
279可提供项目交流和答疑咨询
2、内容说明
智能小车是一种以汽车电子为背景,涵盖控制,模式识别,电子、电气、单片机、机械等多学科的科技创新性设计,它能够根据前进路线自动搜寻,还能爬坡;可以感知前方的障碍物,并自动寻找前进方向,避开障碍物;如果加入相关声光讯号后,更能体现出智能化和人性化的一面。在智能仓储管理及物流配送等领域,当生产现场环境恶劣时,人工不能完成的任务如物料运输和装卸等,可采用智能小车完成相应的任务。基于生产现场和日常生活的实际需要,研究和开发智能小车循迹系统具有十分重要的意义。
然而在工程实践中,最广泛使用的调节器是PID控制器。PID控制器已经发展了近70年,它具有结构简单、稳定性好、工作可靠、调整方便等优点,已成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握时,或当精确的数学模型不可用时,系统控制器的结构和参数必须通过经验和现场调试来确定, PID控制技术的应用最为广泛,最为方便。也就是说当我们对系统和被控对象不完全了解时,或者不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制在实际中也有PI和PD控制,PID控制器是基于系统的误差,利用比例、积分和微分来计算控制量来进行控制。本文中我们通过对PID的控制算法进行设计,基于开发智能小车循迹系统的现状,来确定智能小车的运动轨迹。
本说明书共分为七章,第一章是课题分析与方案设计;第二章是PID控制算法及参数设定;第三章是对标准PID算法进行具体设计;第四章是对增量式 PID算法进行具体设计;第五章是两种算法进行比较及MATLAB仿真;第六章是程序调试,列举了在程序调试过程中会出现的问题,并具体问题、具体分析,其中重点是算法设计过程中参数的整定;第七章是结论与展望。设计的最终成果是基于PID的智能小车的循迹控制算法,利用MATLAB软件对该算法进行仿真,实现了智能小车的轨迹控制。
3、仿真分析

4、参考论文
略
以上是关于用PID和Arduino,怎么让小车走直线,自动同步左右轮胎的速度?的主要内容,如果未能解决你的问题,请参考以下文章
可以用Arduino 2.4G遥控控制sTM32小车么?如果可以那么通讯协议该怎么写?