Arduino UNO与树莓派3B搭建一个视觉小车
Posted 花落知多少情
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Arduino UNO与树莓派3B搭建一个视觉小车相关的知识,希望对你有一定的参考价值。
我会在专栏里写出我的搭建过程和遇到的问题,经过思考整理出较好的搭建步骤减少报错,少走一些弯路,遇到问题大家可以在评论区回复。首先我讲解一下我开始步骤遇到的困难,后面再在专栏里讲解详细我是如何解决问题的。
第一个问题就是给树莓派安装Opencv,这是一个很痛苦的过程,因为python版本,树莓派换源,pip安装,卡顿,anaconda等等,最好的一个解决办法就是一开始就烧录一个有Opencv的树莓派镜像。如果是后面再装Opencv发现不好装,没有直接烧录一次方便,就是之前下载的库代码要重新保存下载一次就有点麻烦,不如一开始就烧录好。
第二个问题就是树莓派打不开摄像头,这里需要把树莓派设置里的ssh,vnc,摄像头等设置全部打开,必须全部才能使用。我有试过把树莓派视频数据传到电脑上处理,用的是网络摄像头,所以占了摄像头后面就不能调用摄像头,怎么打开设置都不行,后面卸载了网络摄像头才可以。
第三个问题就是树莓派与Arduino通讯,我是使用usb线连接他们两的。在使用通讯调试时时真的太痛苦了。我尝试了两种通讯方法, 首先是在树莓派使用PyFirmata直接控制Arduino电机,传感器等,但有个缺陷就是不能很好使用它库的pwm控制轮子实现转向差速,当然不是说它不能使用pwm,只是可能我不太会用。其次就是使用Serial串口发送信息通讯,这里有个巨坑。注意好Serial的大小写,写错了好像还不会报错,就是运行啥结果没有,通讯这里需要多去试,看看树莓派和Arduino能不能接收到数值。
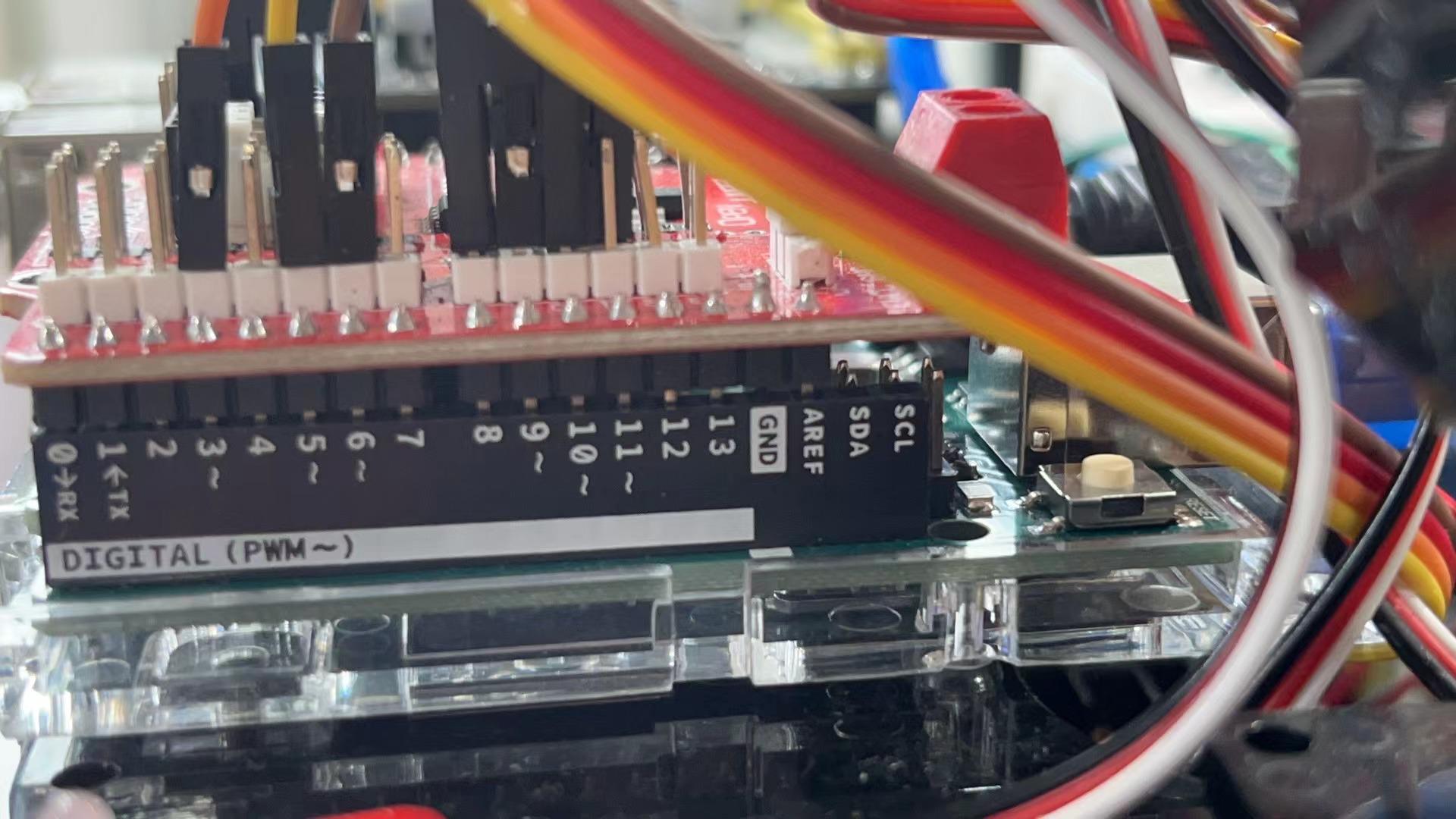
第四个问题就是电机写了前转和后转代码使用PWM不转,这里控制电机一定要接到有~的引脚接口上。
以上是关于Arduino UNO与树莓派3B搭建一个视觉小车的主要内容,如果未能解决你的问题,请参考以下文章
树莓派视觉小车 -- OpenCV巡线(HSL色彩空间PID)
树莓派视觉小车 -- 人脸追踪(人脸识别PID控制舵机运动)