stm32 tim pwm的问题
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了stm32 tim pwm的问题相关的知识,希望对你有一定的参考价值。
看3.5的固件库里面,也没有定义那个哪个脚对应那个输出通道,只是定义为推挽输出,这样stm32能自动识别吗?如果要有其他管脚,不会乱套吗?小菜鸟~~求帮助啊,这个输出管脚是怎么定义的呢
~~求大虾
STM32 通用定时输出PWM
目录
PWM的工作原理
通用定时器输出PWM
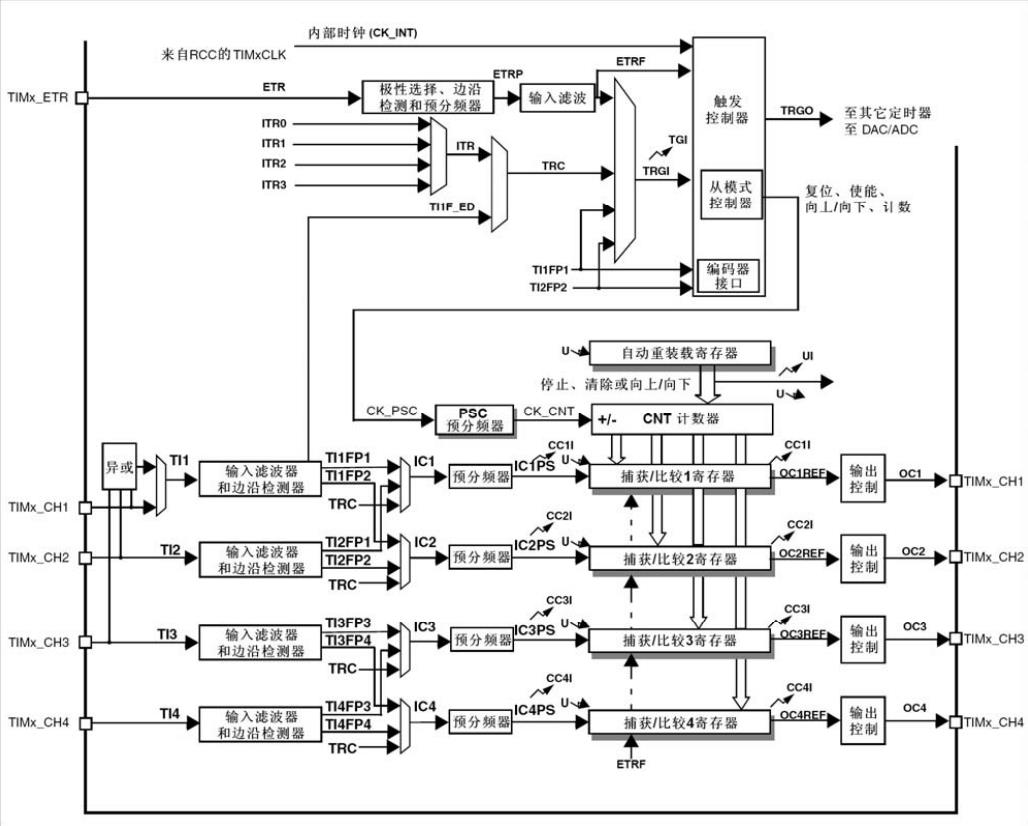
以TIM3为例,STM32的通用定时器氛围TIM2,TIM3,TIM4,TIM5,每个定时器都有独立的四个通道可以用来作为: 输入捕获,输出比较,PWM输出,单脉冲模式输出等。
STM32的定时器除了TIM6和TIM7(基本定时器)之外,其他的定时器都可以产生PWM波输出,高级定时器TIM1,TIM8可以同时产生7路PWM输出,而通用定时器可以同时产生4路PWM输出,这样STM32可以最多同时输出30路PWM输出!
PWM的工作原理
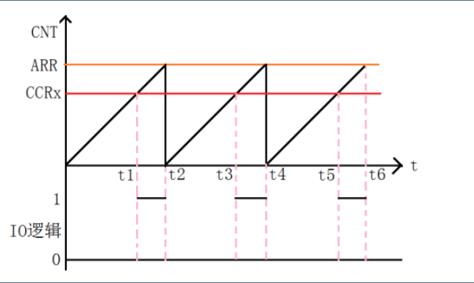
以向上计数为例,讲述PWM原理:
①在PWM输出模式下除了CNT(计数器当前值),ARR(自动重装载值),CCRx(捕获/比较寄存器值)。
②当CNT小于CCRx时,TIMx_CHx通道输出低电平
③当CNT等于或大于CCRx时,TIMx_CHx通道输出高电平
所谓脉宽调制信号(PWM波),就是一个TIMx_ARR自动重装载寄存器确定频率(由它决定PWM周期),TIM_CCRx寄存器确定占空比信号。
假设ARR = 100,CCRx = 80,那么CNT小于80(CCRx)的时低电平,大于80(CCRx)的时高电平,占空比为20%,CNT到达100代表一个周期结束。
如果想要调节占空比,只需要调节CCRx就行了
PWM的内部运作机制
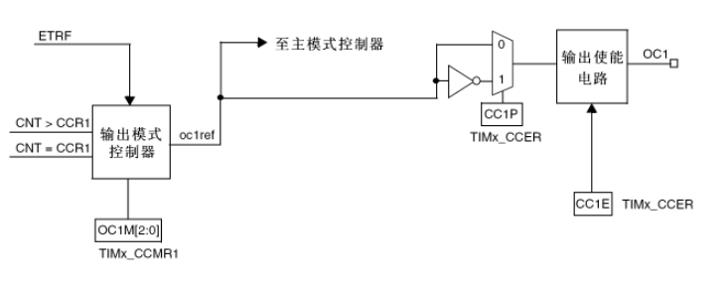
CCR1:设置捕获比较寄存器,设置比较值。
CCMR1寄存区:设置PWM模式1 或者PWM模式2。
CCER: P位:输出/捕获 :设置极性: 0 高电平有效,1 低电平有效
E位:输出/捕获 : 使能端口
PWM的模式
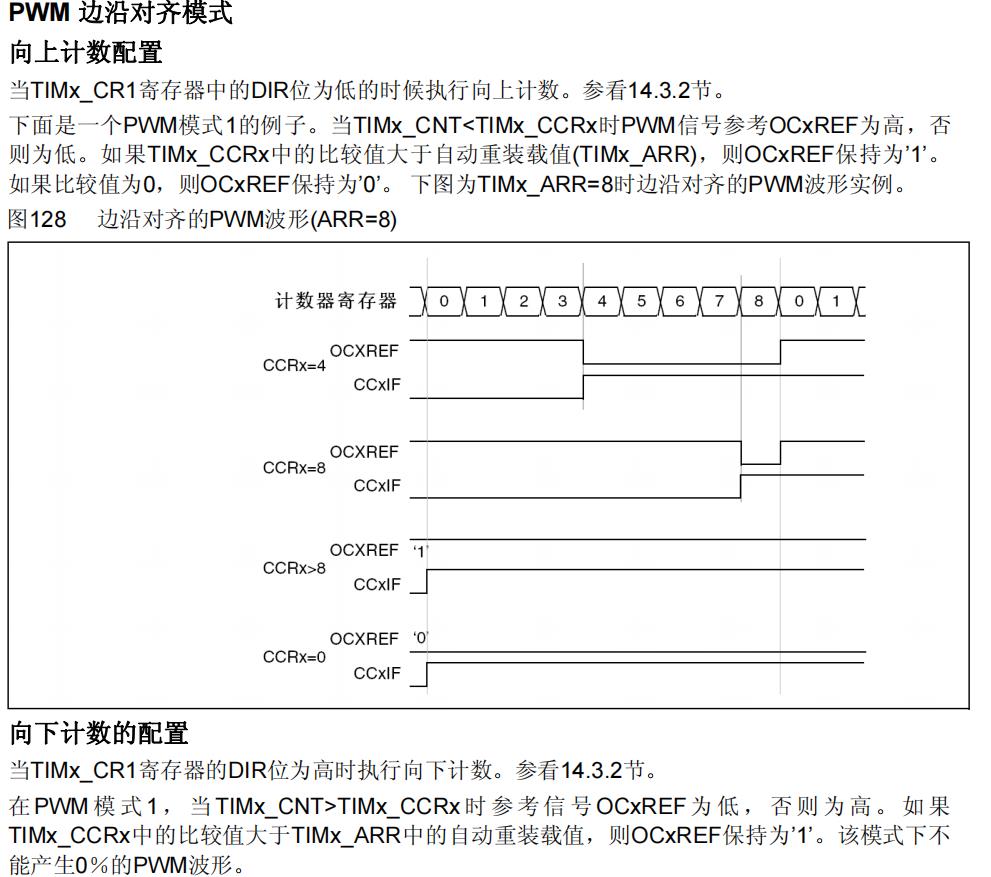
模式一 边沿对齐模式
向上计数时: 当TIMx_CNT<TIMx_CCRx时通道1为有效电平,否则为无效电平;
向下计数时: 一旦TIMx_CNT>TIMx_CCRx,CCR1通道1为无效电平,否则为有效电平。
有效电平是高电平还是低电平由PWM的内部运作机制图中CCER决定
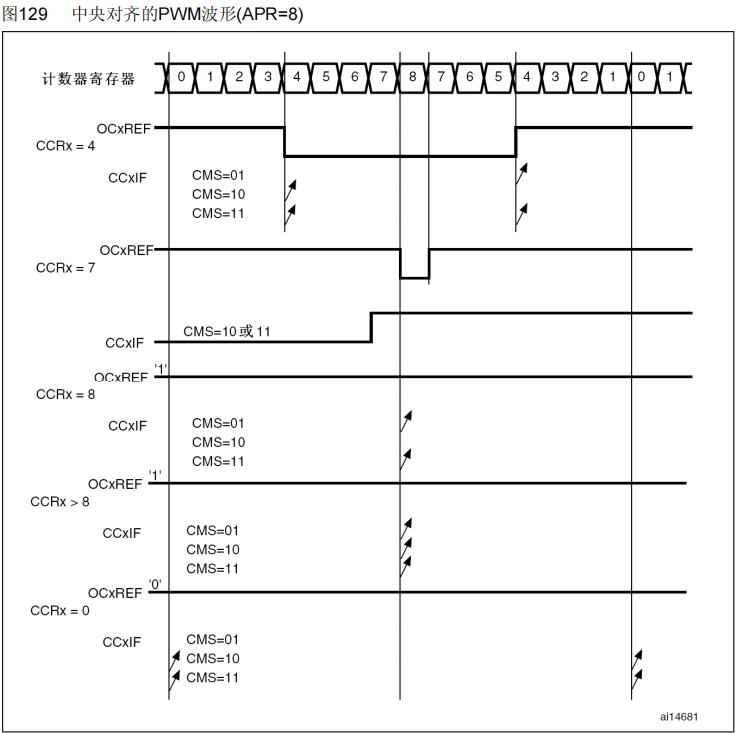
模式二 中央对齐模式
向上计数时: 当TIMx_CNT<TIMx_CCRx时通道1为无效电平,否则为无效电平;
向下计数时: 一旦TIMx_CNT>TIMx_CCRx,CCR1通道1为有效电平,否则为无效电平。
自动加载的预加载寄存器
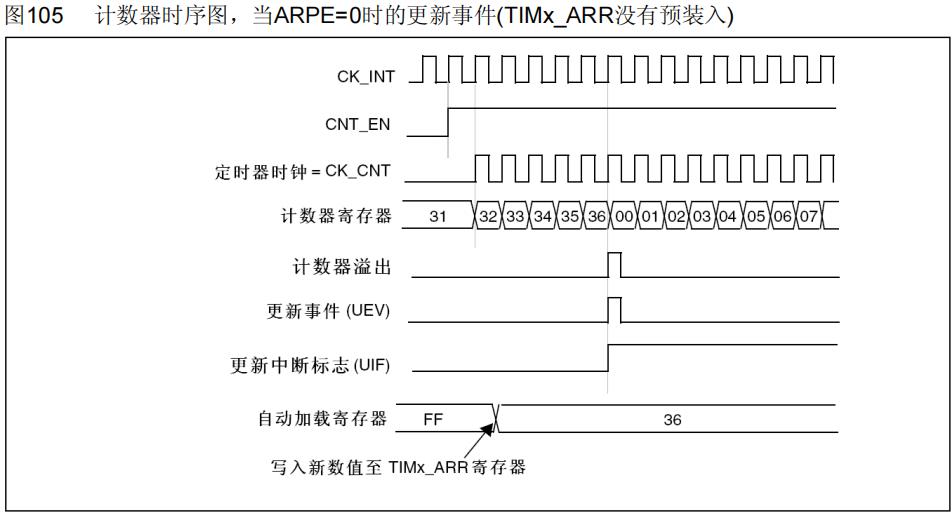
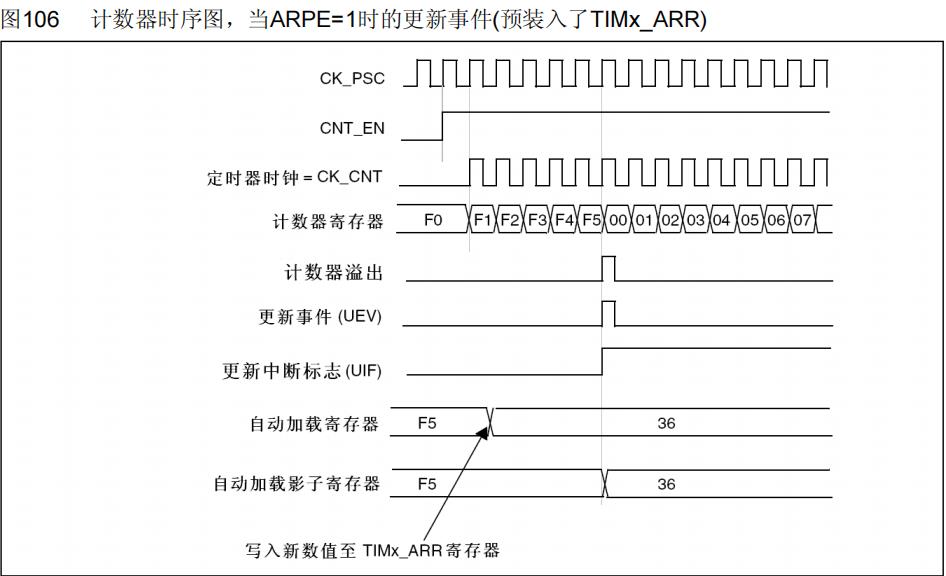
简单的说:
APER =1 ,ARR立即生效
APER =0,ARR下个周期生效
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
定时器输出PWM 结构体讲解
typedef struct
{
uint16_t TIM_OCMode; //配置PWM模式1还是模式2
uint16_t TIM_OutputState; //配置输出使能/ OR失能
uint16_t TIM_OutputNState;
uint16_t TIM_Pulse; //配置比较值,CCRx
uint16_t TIM_OCPolarity; //比较输出极性
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
一般只需要配置字体加粗的三个就行了。
定时器输出PWM 库函数讲解
void TIM_OCxInit //结构体初始化
(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_SetCompare1 //设置比较值函数
(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_OC1PreloadConfig //使能输入比较预装载
(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_Cmd == //开启定时器==
(TIM_TypeDef* TIMx, FunctionalState NewState)
void TIM_ARRPreloadConfig //使能自动重装载的预装载寄存器允许位
(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_OC1PolarityConfig //配置修改极性
(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
定时器输出PWM 库函数讲解
TIM3 PWM输出 驱动SG90电机 配置过程:
1.GPIO结构体
2.配置通用定时器结构体
3.配置定时去输出PWM结构体
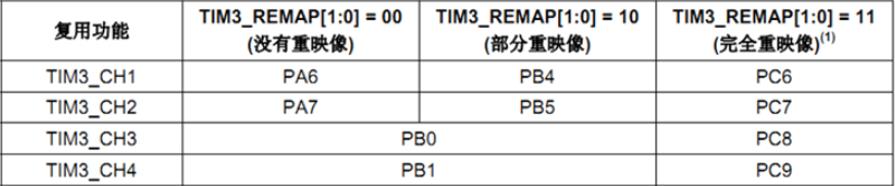
4.打开时钟 —> GPIO时钟,TIM定时器时钟,部分重映射时钟
5.配置PWM比较值
案例驱动SG90电机动起来
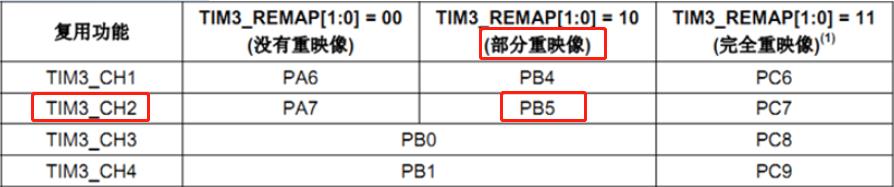
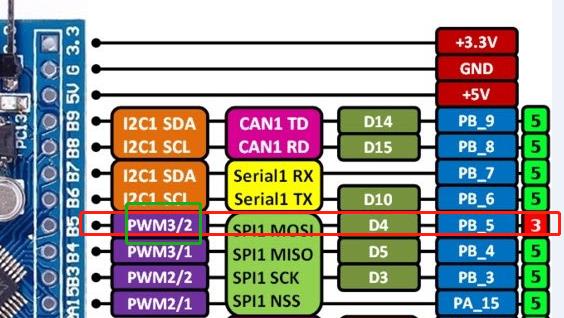
我使用的是PB_5引脚,并重映射为TIM3通道2
motor.h
#include "stm32f10x.h"
void motor_Init(void);
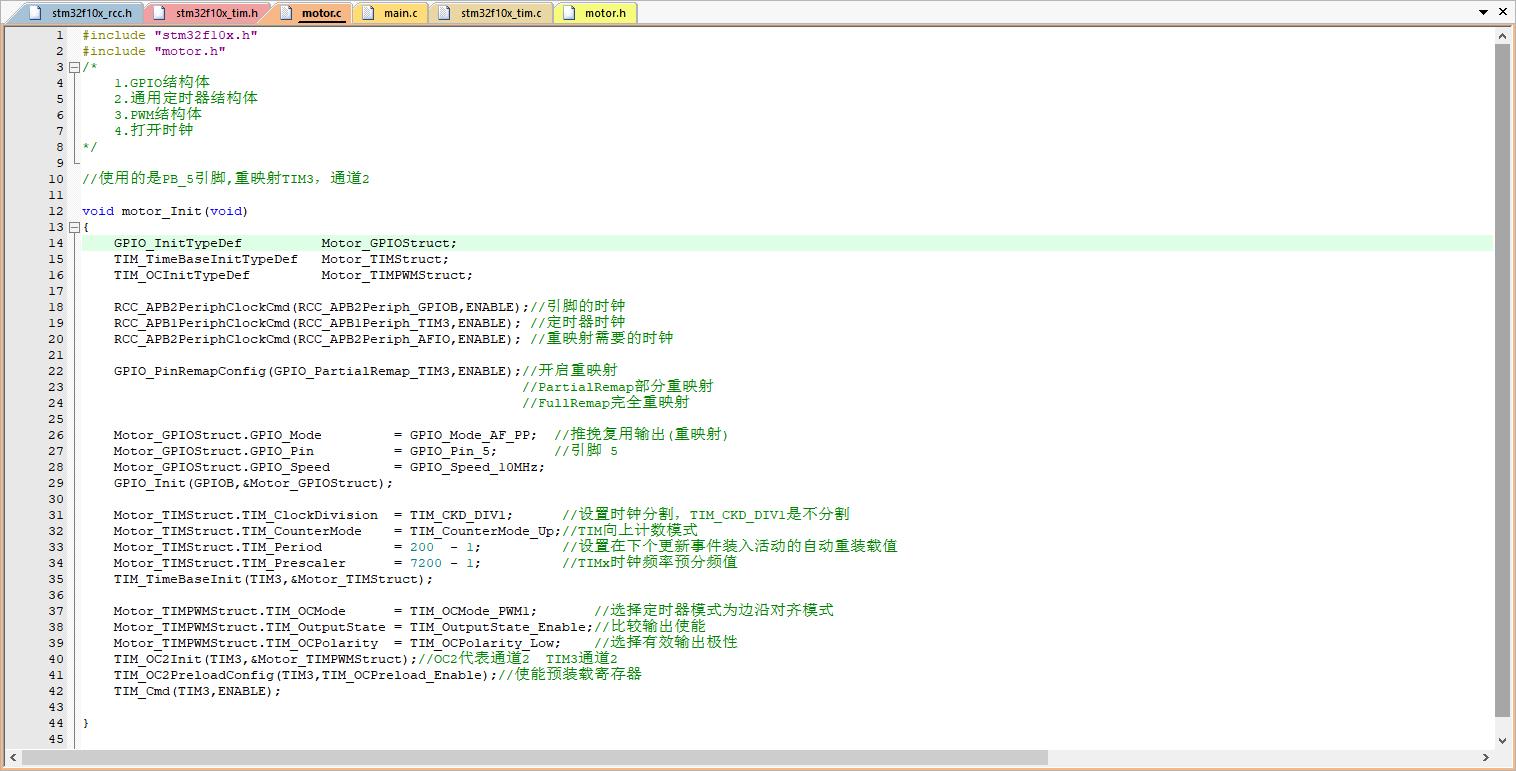
motot.c
#include "stm32f10x.h"
#include "motor.h"
/*
1.GPIO½á¹¹Ìå
2.ͨÓö¨Ê±Æ÷½á¹¹Ìå
3.PWM½á¹¹Ìå
4.´ò¿ªÊ±ÖÓ
*/
//ʹÓõÄÊÇPB_5Òý½Å,ÖØÓ³ÉäTIM3£¬Í¨µÀ2
void motor_Init(void)
{
GPIO_InitTypeDef Motor_GPIOStruct;
TIM_TimeBaseInitTypeDef Motor_TIMStruct;
TIM_OCInitTypeDef Motor_TIMPWMStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//Òý½ÅµÄʱÖÓ
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //¶¨Ê±Æ÷ʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //ÖØÓ³ÉäÐèÒªµÄʱÖÓ
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//¿ªÆôÖØÓ³Éä
//PartialRemap²¿·ÖÖØÓ³Éä
//FullRemapÍêÈ«ÖØÓ³Éä
Motor_GPIOStruct.GPIO_Mode = GPIO_Mode_AF_PP; //ÍÆÍ츴ÓÃÊä³ö(ÖØÓ³Éä)
Motor_GPIOStruct.GPIO_Pin = GPIO_Pin_5; //Òý½Å 5
Motor_GPIOStruct.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOB,&Motor_GPIOStruct);
Motor_TIMStruct.TIM_ClockDivision = TIM_CKD_DIV1; //ÉèÖÃʱÖӷָTIM_CKD_DIV1ÊDz»·Ö¸î
Motor_TIMStruct.TIM_CounterMode = TIM_CounterMode_Up;//TIMÏòÉϼÆÊýģʽ
Motor_TIMStruct.TIM_Period = 200 - 1; //ÉèÖÃÔÚϸö¸üÐÂʼþ×°Èë»î¶¯µÄ×Ô¶¯ÖØ×°ÔØÖµ
Motor_TIMStruct.TIM_Prescaler = 7200 - 1; //TIMxʱÖÓƵÂÊÔ¤·ÖƵֵ
TIM_TimeBaseInit(TIM3,&Motor_TIMStruct);
Motor_TIMPWMStruct.TIM_OCMode = TIM_OCMode_PWM1; //Ñ¡Ôñ¶¨Ê±Æ÷ģʽΪ±ßÑضÔÆëģʽ
Motor_TIMPWMStruct.TIM_OutputState = TIM_OutputState_Enable;//±È½ÏÊä³öʹÄÜ
Motor_TIMPWMStruct.TIM_OCPolarity = TIM_OCPolarity_Low; //Ñ¡ÔñÓÐЧÊä³ö¼«ÐÔ
TIM_OC2Init(TIM3,&Motor_TIMPWMStruct);//OC2´ú±íͨµÀ2 TIM3ͨµÀ2
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//ʹÄÜԤװÔؼĴæÆ÷
TIM_Cmd(TIM3,ENABLE);
}
main.c
#include "stm32f10x.h"
#include "led.h"
#include "relay.h"
#include "shake.h"
#include "exti.h"
#include "usart.h"
#include "stdio.h"
#include "tim.h"
#include "motor.h"
void delay(uint16_t time)
{
uint16_t i =0;
while(time--){
i=12000;
while(i--);
}
}
int main()
{
uint16_t pwmval = 155;
motor_Init();
while(1)
{
for(pwmval = 195 ; pwmval >= 175 ; pwmval -= 5)
{
TIM_SetCompare2(TIM3,pwmval);
delay(500);
}
}
}
以上是关于stm32 tim pwm的问题的主要内容,如果未能解决你的问题,请参考以下文章