STM32F103 使用TIM3产生四路PWM
Posted jiwangbujiu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F103 使用TIM3产生四路PWM相关的知识,希望对你有一定的参考价值。
STM32F103 使用TIM3产生四路PWM
程序如下:
/******************************************************************************* * 程序说明 : 思路PWM波生成函数 * 函数功能 : 使用TIM3的PWM功能生成思路PWM, * 输 入 : 无 * 输 出 : 四路PWM,通过GPIO引脚复用,对TIM3的四个输出通道引脚重映射为PC6、PC7、PC8、PC9 *******************************************************************************/ #include"stm32f10x.h" void RCC_Cfg(void); void GPIO_Cfg(void); void TIM_Cfg(void); void NVIC_Cfg(void); void delay_ms(u32 i); void PWM_Cfg(float dutyfactor1,float dutyfactor2,float dutyfactor3,float dutyfactor4); int main() { u8 flag = 1; float ooo=0.5; RCC_Cfg(); NVIC_Cfg(); GPIO_Cfg(); TIM_Cfg(); //开启定时器2 TIM_Cmd(TIM3,ENABLE); //呼吸灯 while(1){ PWM_Cfg(ooo,10,50+0.5*ooo,200-2*ooo); if(flag == 1) { ooo=ooo+0.002; } if(flag == 0) { ooo=ooo-0.002; } if(ooo>100){ flag = 0; } if(ooo<0.5) { flag = 1; } } } void GPIO_Cfg(void) { GPIO_InitTypeDef GPIO_InitStructure; //RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE); //全部映射,将TIM3_CH2映射到PB5 //根据STM32中文参考手册2010中第第119页可知: //当没有重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PA6,PA7,PB0,PB1 //当部分重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PB4,PB5,PB0,PB1 //当完全重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PC6,PC7,PC8,PC9 //也即是说,完全重映射之后,四个通道的PWM输出引脚分别为PC6,PC7,PC8,PC9,我们用到了通道1和通道2,所以对应引脚为PC6,PC7,PC8,PC9,我们用到了通道1和通道2,所以对应引脚为 GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE); //部分重映射的参数 //GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //设置PC6、PC7、PC8、PC9为复用输出,输出4路PWM GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; GPIO_Init(GPIOC,&GPIO_InitStructure); } void TIM_Cfg(void) { //定义结构体 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //重新将Timer设置为缺省值 TIM_DeInit(TIM3); //采用内部时钟给TIM2提供时钟源 TIM_InternalClockConfig(TIM3); //预分频系数为0,即不进行预分频,此时TIMER的频率为72MHzre.TIM_Prescaler =0; TIM_TimeBaseStructure.TIM_Prescaler = 0; //设置计数溢出大小,每计20000个数就产生一个更新事件 TIM_TimeBaseStructure.TIM_Period = 7200 - 1; //设置时钟分割 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置计数器模式为向上计数模式 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //将配置应用到TIM2中 TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure); //清除溢出中断标志 //TIM_ClearFlag(TIM2, TIM_FLAG_Update); //禁止ARR预装载缓冲器 //TIM_ARRPreloadConfig(TIM2, DISABLE); //开启TIM2的中断 //TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); } /******************************************************************************* * 函 数 名 : PWM波产生配置函数 * 函数功能 : PWM_Cfg * 输 入 : dutyfactor 占空比数值,大小从0.014到100 * 输 出 : 无 *******************************************************************************/ void PWM_Cfg(float dutyfactor1,float dutyfactor2,float dutyfactor3,float dutyfactor4) { TIM_OCInitTypeDef TIM_OCInitStructure; //设置缺省值 TIM_OCStructInit(&TIM_OCInitStructure); //TIM3的CH1输出 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是比较模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能,使能PWM输出到端口 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是高还是低 //设置占空比,占空比=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100% TIM_OCInitStructure.TIM_Pulse = dutyfactor1 * 7200 / 100; TIM_OC1Init(TIM3, &TIM_OCInitStructure); //TIM3的CH2输出 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是比较模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能,使能PWM输出到端口 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是高还是低 //设置占空比,占空比=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100% TIM_OCInitStructure.TIM_Pulse = dutyfactor2 * 7200 / 100; TIM_OC2Init(TIM3, &TIM_OCInitStructure); //TIM3的CH3输出 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是比较模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能,使能PWM输出到端口 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是高还是低 //设置占空比,占空比=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100% TIM_OCInitStructure.TIM_Pulse = dutyfactor3 * 7200 / 100; TIM_OC3Init(TIM3, &TIM_OCInitStructure); //TIM3的CH4输出 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是比较模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能,使能PWM输出到端口 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是高还是低 //设置占空比,占空比=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100% TIM_OCInitStructure.TIM_Pulse = dutyfactor4 * 7200 / 100; TIM_OC4Init(TIM3, &TIM_OCInitStructure); //使能输出状态 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置TIM3的PWM输出为使能 TIM_CtrlPWMOutputs(TIM3,ENABLE); } void NVIC_Cfg(void) { //定义结构体 NVIC_InitTypeDef NVIC_InitStructure; //选择中断分组1 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); //选择TIM2的中断通道 NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //抢占式中断优先级设置为0 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //响应式中断优先级设置为0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //使能中断 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } void RCC_Cfg(void) { //定义错误状态变量 ErrorStatus HSEStartUpStatus; //将RCC寄存器重新设置为默认值 RCC_DeInit(); //打开外部高速时钟晶振 RCC_HSEConfig(RCC_HSE_ON); //等待外部高速时钟晶振工作 HSEStartUpStatus = RCC_WaitForHSEStartUp(); if(HSEStartUpStatus == SUCCESS) { //设置AHB时钟(HCLK)为系统时钟 RCC_HCLKConfig(RCC_SYSCLK_Div1); //设置高速AHB时钟(APB2)为HCLK时钟 RCC_PCLK2Config(RCC_HCLK_Div1); //设置低速AHB时钟(APB1)为HCLK的2分频 RCC_PCLK1Config(RCC_HCLK_Div2); //设置FLASH代码延时 FLASH_SetLatency(FLASH_Latency_2); //使能预取指缓存 FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //设置PLL时钟,为HSE的9倍频 8MHz * 9 = 72MHz RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); //使能PLL RCC_PLLCmd(ENABLE); //等待PLL准备就绪 while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); //设置PLL为系统时钟源 RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //判断PLL是否是系统时钟 while(RCC_GetSYSCLKSource() != 0x08); } //允许TIM2的时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //允许GPIO的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO,ENABLE); } void TIM2_IRQHandler(void) { u16 aa=10; if(TIM_GetFlagStatus(TIM2,TIM_IT_Update)!=RESET) { //清除TIM2的中断待处理位 TIM_ClearITPendingBit(TIM2 , TIM_FLAG_Update); TIM_Cmd(TIM2,DISABLE); //通过循环让灯闪烁 while (aa){ GPIO_SetBits(GPIOC,GPIO_Pin_3); delay_ms(10); GPIO_ResetBits(GPIOC,GPIO_Pin_3); delay_ms(10); aa--; } //使灯的状态为灭 GPIO_SetBits(GPIOC,GPIO_Pin_3); TIM_Cmd(TIM2,ENABLE); } } void delay_ms(u32 i) { u32 temp; SysTick->LOAD=9000*i; //设置重装数值, 72MHZ时 SysTick->CTRL=0X01; //使能,减到零是无动作,采用外部时钟源 SysTick->VAL=0; //清零计数器 do { temp=SysTick->CTRL; //读取当前倒计数值 } while((temp&0x01)&&(!(temp&(1<<16)))); //等待时间到达 SysTick->CTRL=0; //关闭计数器 SysTick->VAL=0; //清空计数器 }
在产生PWM时,如果输出引脚已经被使用,就要对引脚进行重映射,阅读《STM32中文参考手册2010》第119页可知:
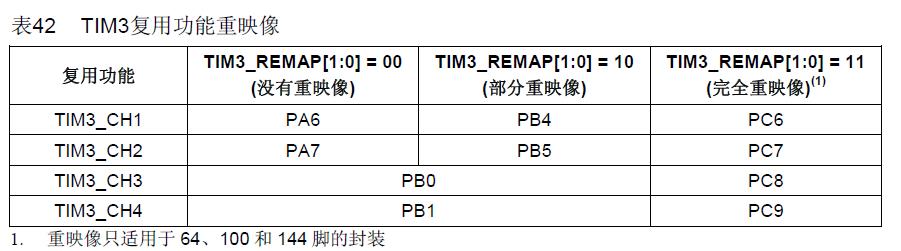
对TIM3而言:
1、当没有重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PA6,PA7,PB0,PB1
2、当部分重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PB4,PB5,PB0,PB1
3、当完全重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PC6,PC7,PC8,PC9
为了整齐,我们选择完全重映射,使用的函数是:
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
如果想使用部分映射,参数用GPIO_PartialRemap_TIM3:
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
以上是关于STM32F103 使用TIM3产生四路PWM的主要内容,如果未能解决你的问题,请参考以下文章