AUTOSAR知识点Com:CANSM规范部分解读
Posted 剑从东方起
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了AUTOSAR知识点Com:CANSM规范部分解读相关的知识,希望对你有一定的参考价值。
1、概述
看规范过程中的记录点,这部分主要是与其他模块的交互,以及本身或者其他模块和本模块的交互点在哪里,部分规范翻译。
2、CanSM与其他模块的交互
规范里面的图形如下
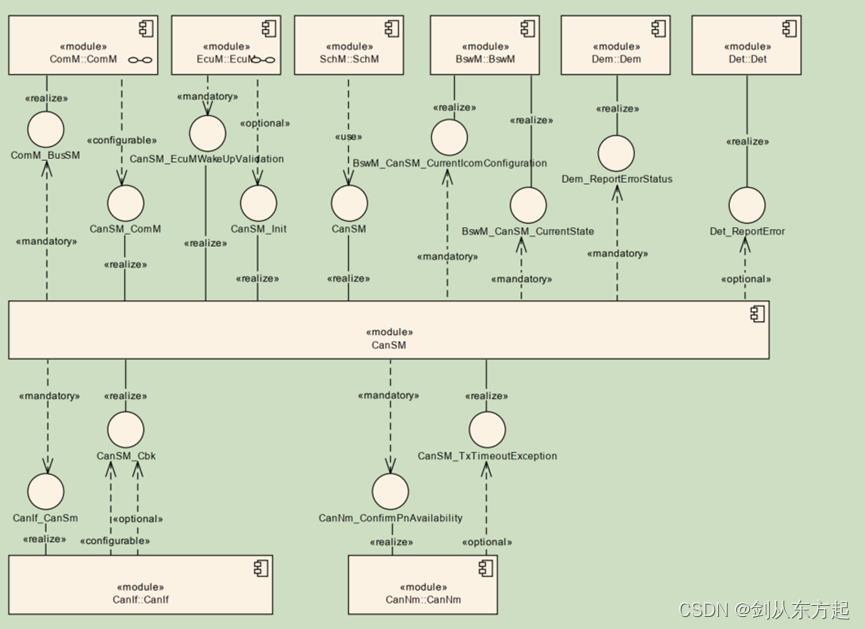
2.1、ECUM
EcuM模块初始化CanSM模块,与CanSM模块交互,进行CAN总线唤醒验证。下个章节会描述调用了什么函数。
2.2、SchM
BSW调度模块调用CanSM模块的主函数(此处理解一个含义SCHM,个人理解与OS的调度有些类似),这对CanSM模块的循环处理是必要的。
2.3、ComM
ComM模块使用CanSM模块的API来请求CAN网络的通信模式,这些网络标识具有唯一的句柄。唯一的句柄其实就是handle
CanSM模块可以将网络的当前通信模式通知到ComM模块。ComM告诉 CanSM要做什么。
2.4、CanIf
CanSM模块使用CanIf模块的API来控制CAN控制器的操作模式,也可以使用CDD模块CAN收发器的API。
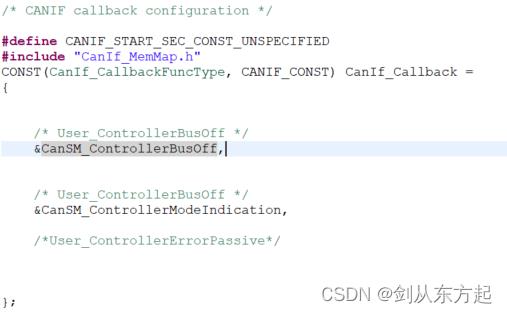
CanIf模块通知CanSM模块发生了什么事件,就是回调,其实真正关联的也就两个,如下图
2.5、 Dem
CanSM模块将特定的生产错误报告到DEM模块,这个地方有个点,就是Busoff问题,问题如下。
假设将busoff故障上报给DTC,那么我们设定一个条件5次快恢复才上报,此时应该怎么实现呢?
2.6、BswM
CanSM需要将总线特定的模式更改通知到BswM模块。
与通知ComM什么区别呢?一个是通信方面,一个是总体所处状态。
2.7、Nm
CanSM模块将部分网络是否可用通知给CanNm模块,并在部分联网的情况下处理已通知的CanNm超时异常。
2.8、Det
CanSM模块在错误检查开启的前提下,向Det模块发送开发和运行时的错误。
3、其他说明
描述一个头文件注意点:
CanSM.h应该包含头文件ComM.h 规范解释一些API需要使用ComM的定义。以此看来头文件在AUTOSAR里面包含是很严谨的。
其他功能说明
一个ECU可以有不同的通信网络。每个网络都必须用唯一的网络句柄(也就是handle)来标识。ComM模块向网络请求通信模式。通过它的配置,它知道哪个句柄被分配给什么样的网络。对于CAN,它使用CanSM模块。
CanSM模块负责CAN网络的控制流抽象(其实相对于硬件抽象层就是多了一层状态控制,抽象CanIf的接口):它根据来自ComM模块的模式请求改变配置的CAN网络的通信模式。
因此CanSM模块使用了Canlf模块的API。Canlf模块负责配置的CAN控制器和CAN收发器的控制流抽象(Canlf模块的数据流抽象与CanSM模块无关)。CAN控制器模式和CAN收发器模式的任何变化都将由Canlf模块通知给CanSM模块。根据CAN网络状态机的通知和状态(CanSM模块应为每个配置的CAN网络实现),CanSM模块通知ComM和BswM。
CanSM模块应该将当前的网络模式存储在内部。
CanSM的模式有
COMM_NO_COMMUNICATION,
COMM_SILENT_COMMUNICATION,
COMM_FULL_COMMUNICATION

CanSM模块应在每个成功的控制器模式更改或总线条件更改到canif_cs_stop时存储,以确保每个可以控制器的内部更改模式。
详解AUTOSAR:AUTOSRA软件架构(理论篇—2)
目录
AUTOSAR规范主要包括:软件架构、方法论和应用接口三部分内容。其中,软件架构是实现软硬件分离的关键,它使汽车嵌入式系统控制软件开发者摆脱了以往ECU软件开发与验证时对硬件系统的依赖。
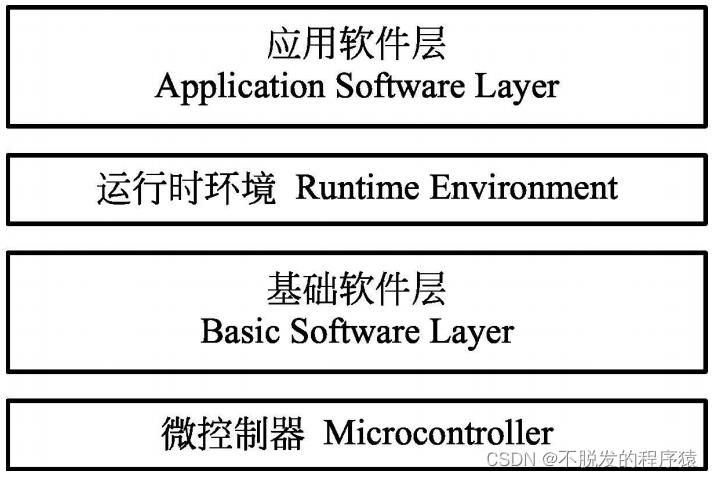
在AUTOSAR软件架构中,汽车嵌入式系统软件自上而下分别为:应用软件层(Application
Software Layer,ASW)、运行时环境(Runtime Environment,RTE)、基础软件层(Basic Software Layer,BSW)和微控制器(Microcontroller)。为保证上层与下层的无关性,通常情况下,每一层只能使用下一层所提供的接口,并向上一层提供相应的接口。如图下图所示:
1、应用软件层
应用软件层(Application Software Layer,ASW)包含若干个软件组件(Software Component,SWC)(软件组件在下一篇文章讲解),软件组件间通过端口(Port)进行交互。每个软件组件可以包含一个或者多个运行实体(Runnable Entity,RE),运行实体中封装了相关控制算法,其可由RTE事件(RTE Event)触发。
2、运行时环境
运行时环境(Runtime Environment,RTE)作为应用软件层与基础软件层交互的桥梁,为软硬件分离提供了可能。RTE可以实现软件组件间、基础软件间以及软件组件与基础软件之间的通信。RTE封装了基础软件层的通信和服务,为应用层软件组件提供了标准化的基础软件和通信接口,使得应用层可以通过RTE接口函数调用基础软件的服务。此外,RTE抽象了ECU之间的通信,即RTE通过使用标准化的接口将其统一为软件组件之间的通信。由于RTE的实现与具体ECU相关,所以必须为每个ECU分别实现。
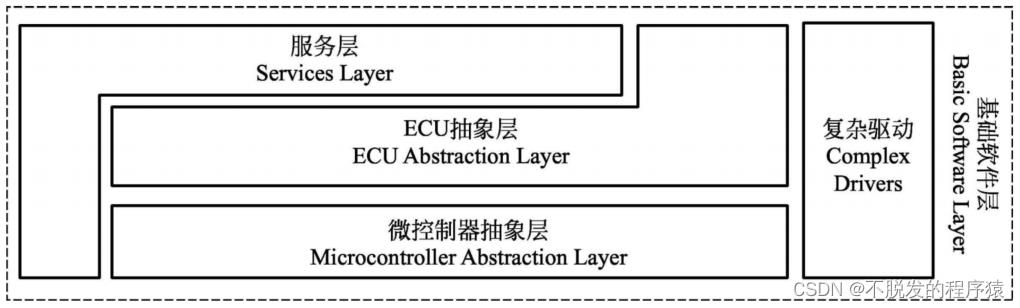
3、基础软件层
基础软件层(Basic Software Layer,BSW)可分为四层即:服务层(Services Layer)、ECU抽象层(ECU Abstraction Layer)、微控制器抽象层(Microcontroller Abstraction Layer,MCAL)和复杂驱动(Complex Drivers),如下图所示:
可以将基础软件层进一步细化,包括:系统服务( System Services)、存储器服务(Memory Services)、通信服务(Communication Services)等,它们主要用于提供基础软件服务,包括标准化的系统功能和功能接口。如下图所示:
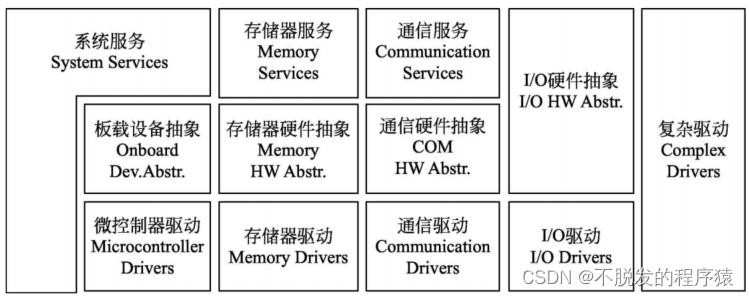
3.1、服务层
服务层(Services Layer)提供了汽车嵌入式系统软件常用的一些服务,其可分为系统服务(System Services)、存储器服务(MemoryServices)以及通信服务(Communication Services)三大部分。提供包括:网络通信管理、存储管理、ECU模式管理和实时操作系统(Real Time Operating System,RTOS)等服务。除了操作系统外,服务层的软件模块都是与ECU平台无关的。
3.2、ECU抽象层
ECU抽象层(ECU Abstraction Layer)包括板载设备抽象(Onboard Devices Abstraction) 、存储器硬件抽象(Memory Hardware Abstraction)、通信硬件抽象(Communication Hardware Abstraction)和I/O硬件抽象(Input/Output Hardware Abstraction)。
该层将ECU结构进行了抽象,负责提供统一的访问接口,实现对通信、存储器或者IO的访问,从而不需要考虑这些资源是由微控制器片内提供的,还是由微控制器片外设备提供的。该层与ECU平台相关,但与微控制器无关,这种无关性正是由微控制器抽象层来实现的。
3.3、微控制器抽象层
微控制器抽象层(Microcontroller Abstraction Layer,MCAL)是实现不同硬件接口统一化的特殊层。通过微控制器抽象层可将硬件封装起来,避免上层软件直接对微控制器的寄存器进行操作。微控制器抽象层包括微控制器驱动(Microcontroller Drivers)、存储器驱动(Memory Drivers)、通信驱动(Communication Drivers)以及I/O驱动(IO Drivers),如下图所示:

3.4、复杂驱动层
由于对复杂传感器和执行器进行操作的模块涉及严格的时序问题,难以抽象,所以在AUTOSAR规范中这部分没有被标准化,统称为复杂驱动( Complex Drivers)。
以上是关于AUTOSAR知识点Com:CANSM规范部分解读的主要内容,如果未能解决你的问题,请参考以下文章