利用摄影测量进行地形建模的介绍
Posted 倾城一少
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了利用摄影测量进行地形建模的介绍相关的知识,希望对你有一定的参考价值。
一、前言
从一个地方到另一个地方的地球表面由连续和突然的海拔变化组成,个人和社会都必须应对这些变化。 水从高山和丘陵向下流,从溪流流入河流,形成三角洲,最终汇入大海。 三维 (3D) 地面信息的获取和表示一直是与行星表面相关的研究和工作的一个重要方面。 地形知识是行星探索和研究的主要因素。
在 20 世纪 50 年代初,摄影测量被广泛用于收集公路设计数据。 Roberts (1957) 概念化了一种新工具,通过使用具有摄影测量的数字计算机来获取公路工程规划和设计的数据。 Miller & Laflamme (1958) 提出并阐述了数字地形模型 (DTM) 的概念,将其定义为由具有已知 X、Y 和 Z 坐标的大量选定点对地面连续表面的统计表示。
自 Miller & Laflamme (1958) 提出 DTM 一词以来,在 55 年的发展期内,出现了其他一些流行的术语,即数字高程模型 (DEM's) 和数字表面模型 (DSM)。
然而,这些术语 DTM、DEM 和 DSM 的使用一直令人困惑,并且通常被认为是同义词。 Maune et al., (2001) 将这三个术语描述如下:
表1 DEM、DSM 和 DTM 的定义

二、利用摄影测量进行DEM制作
地球表面地形的数字表示一直是地理和测量领域的一个重要焦点(Singh 等人,2015 年)。 随着地理空间行业的发展和技术的进步,DEM 在许多其他应用领域也变得重要。 广大用户对高精度、高分辨率 DEM 提出了新的需求。 因此,生成高分辨率 DEM 数据是一个很大的需求。 在生成 DEM/DTM 的各种方法中,摄影测量正在成为一种更受欢迎、更高效且更便宜的解决方案。
1867 年,普鲁士建筑师“Albrecht Meydenbauer”首次使用摄影测量这一表达方式,他制作了一些最早的地形图和立面图。 自成立以来,摄影测量的主要目标一直是制作地形图,最好是大比例尺。 随着“分析立体绘图仪”的出现,立体航空摄影可用于提取等高线形式的高程数据。 由于过程自动化伴随着数字航空影像的发展,DEM 生成通常是计算机辅助的。 从数字航空或卫星图像生成 DEM 如今是一个全自动批处理过程,生成的高程模型通常用于支持正射影像生成。
摄影测量技术应用于两个或多个光学图像以导出摄影测量 DEM。 测量遥感立体数据集的第一和第二图像上的共轭点之间的图像视差以计算像素的高程。 自动图像匹配过程通过图像匹配算法自动测量两张或多张重叠照片中的共轭点,以提供准确的初始视差。 由于高精度匹配算法和高分辨率线性推扫式传感器的出现,图像块通常以大的重叠记录,这使得人们可以生成高精度的 DEM(图 1)。
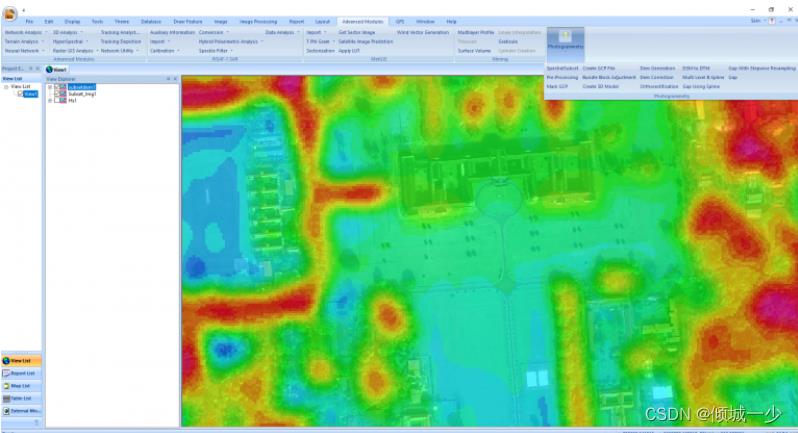
图1 DEM
使用 IGiS 摄影测量模块从 Worldview-3 立体数据(印度北阿坎德邦德拉敦市)生成的 DEM。
地形测绘中的摄影测量服务已经很成熟,但近年来,该技术已广泛应用于 GIS、建筑、工业、工程、医学、地质学和许多其他领域,以生成精确的 3D 数据。 市场上有许多用于摄影测量处理的商业化自助 (COTS) 软件,但它们较高的成本限制了来自印度等发展中国家的广泛用户群在其应用程序中采用摄影测量来生成高分辨率 DEM/DEM,这导致 在不太准确的地表过程相关建模和模拟中。 为了解决这个问题,印度 Scanpoint Geomatics Limited (SGL) 为其 IGiS 软件开发了一种具有成本效益且用户友好的摄影测量模块。 IGiS 摄影测量模块可以使用有理函数模型 (RFM) 处理任何具有有理多项式系数 (RPC) 文件的立体数据。 然而,该模块不需要任何 GCP 或匹配点进行摄影测量处理,添加一些分布良好的 GCP,提高了输出的平面和垂直精度。 该模块还提供了将垂直基准与椭球体和大地水准面相互转换的功能。 该模块具有从 DEM 到 DTM 的自动生成以及用于生成逼真的正射影像的正射校正工具(图 2)。
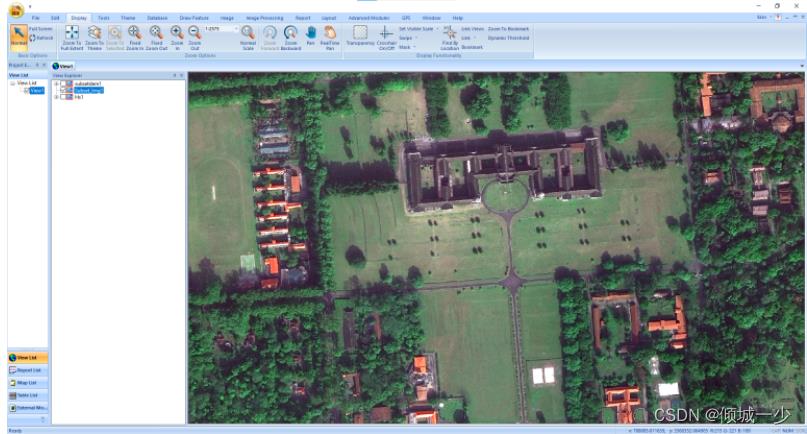
图2 正射影像
使用 Worldview-3 立体数据生成的高分辨率正射影像(印度北阿坎德邦台拉登市),并在 IGiS 摄影测量模块中生成 DEM。
近景摄影测量
步骤:
(1)求相机的内外方位元素:三维检校场,二维检校场(单反相机变焦镜头设置为定焦模式[数码相机没有变焦一说]-->拍摄像片-->根据特征点匹配定位(二维平面检校))
(2)建立坐标系:相对坐标系
(3)拍摄两张立体相对图像
(4)提取相对坐标:摄影测量空三
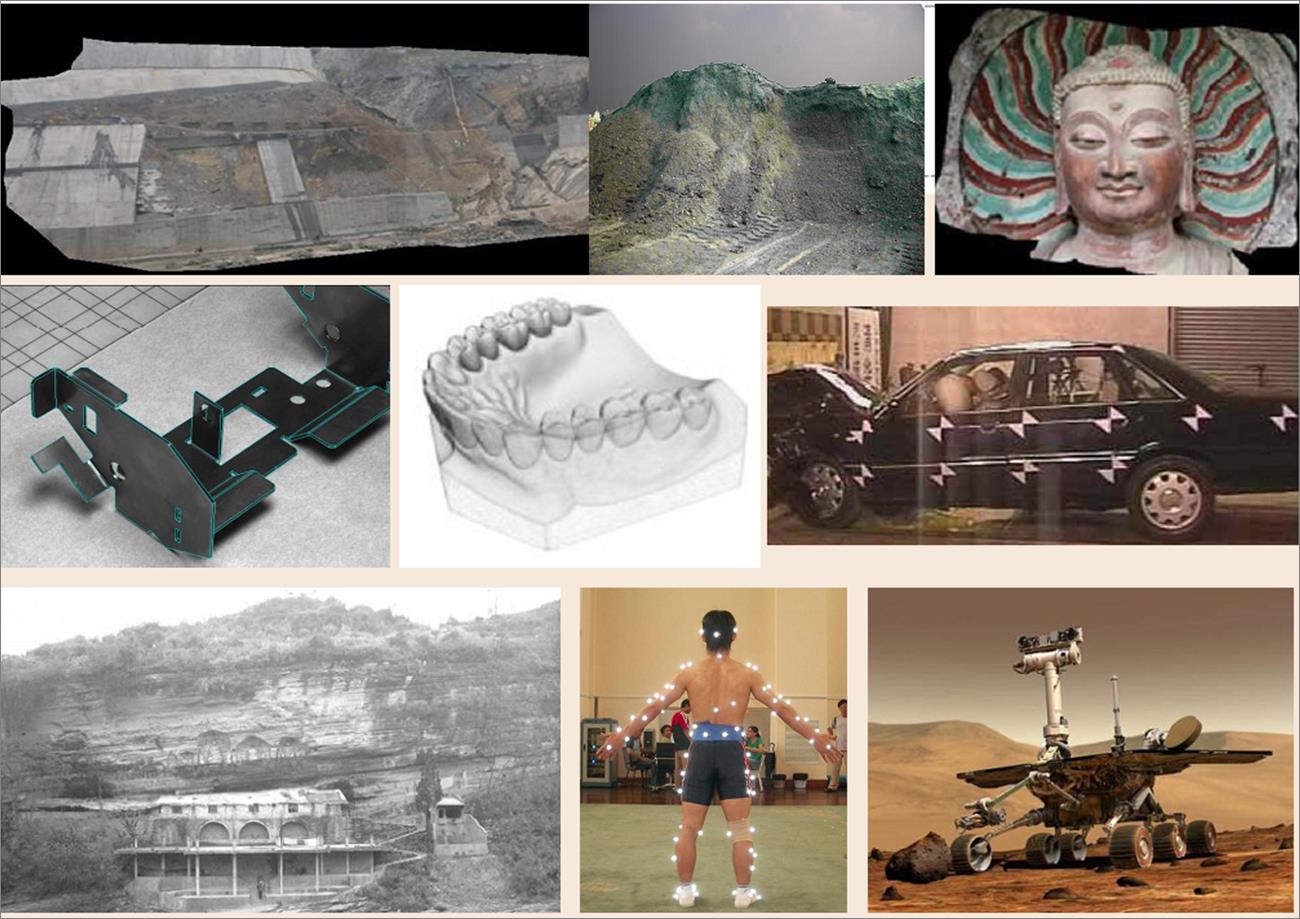
近景摄影测量(Close-range Photogrammetry)是摄影测量与遥感(Photogrammetry & Remote Sensing)学科的一个分支,它通过摄影手段以确定目标的外形和运动状态。主要包括地形、古文物古建筑、工业、生物医学等几个部分。
跟航空摄影测量基本原理相同。
不同点:第一点,测量目的不同。航空摄影测量以测制地形、地貌为主,注重其绝对位置;近景摄影测量以测定目标物的形状、大小和运动状态为目的。第二点,目标物不同。航空摄影测量目标物以地形、地貌为主;近景摄影测量目标物各式各样、千差万别,大到寺庙、飞机、海轮,中到汽车、脚印,小到青蛙、手腕骨、弹壳撞击孔甚至花粉。第三点,目标景深与摄影距离之比不同。航空摄影中要求地形最大高差与相对航高之比不得大于1/6;近景中较大,景深变化造成的影像变形。第四点,摄影方式不同。航空摄影为近似竖直摄影方式;近景摄影除正直摄影方式外,还有交向摄影方式、多基线旋转摄影方式等等。第五点,获取设备不同。航空摄影以航摄仪为主;近景摄影除各种量测摄影机外,还有各类非量测摄影机,如X光机、普通相机、CCD相机等。第六点,控制方式不同。航空摄影测量的控制方式以控制点为主,且多为明显的地面点;近景摄影测量除控制点方式外,还有相对控制方式,且常常使用人工标志。第七点,近景适用于动态目标。第八点,特殊理论与处理方法。相对控制及特殊标志点、直接线性变换DLT、相机检校、大倾角(旋偏)、影像定向。

现有的三维测量:
1. 基于测距测角的工程测量:适用于稀疏目标点高精度测量,不适用于目标点密集测量、运动姿态测量、水下目标和微观目标测量等。
2. 三维坐标量测仪:设备精密,原理简单;但设备昂贵、仅能测量小于它的静态物体、成本高。
3. 基于光干涉原理:原理简单,适用于动态对象;但仅适用于表面起伏不明显、色调较一致的平缓目标。
4. 全息技术:全息技术是一种同时记录光波的振幅(光强)和相位信息并使光波重现的技术。
5. 光截面\\结构光摄影测量
6. 基于磁力场的量测技术:利用电磁转换技术,在被测物体周围生成磁力场,用一手工操作的触杆逐点量测非金属目标的三维空间坐标。
7. 三维激光扫描技术
摄影测量的优缺点:
1. 优势
瞬间获取被测目标的大量几何和物理信息,适合于测量点数众多的目标;非接触测量手段,可在恶劣条件下作业;适合于动态目标测量;成本相对较低,精度较高;适用于各行各业。
2. 缺点
技术含量高,需专门技术人员;并不一定适用于所有测量对象:无法获取质量合格的影像、待测点少。
精度评定及影响因素
1. 精度评定
估算精度:按理论的估算公式计算得到。
内精度:模型本身的计算精度,与摄影测量网形有关。
外精度:检查点验证精度,精度低于内精度,更加可靠。
2. 影响因素
影像获取设备:检校精度、相机成像性能(分辨率等);
摄影方式:摄影比例尺、摄站数量和分布、基高比、影像视数等;
控制质量:控制点精度、数量和分布;相对控制强度等;
物体自身条件:照明条件、纹理特征等;
后续处理软硬件:图像处理及摄影测量处理方法、量测仪器性能等;
基础知识回顾
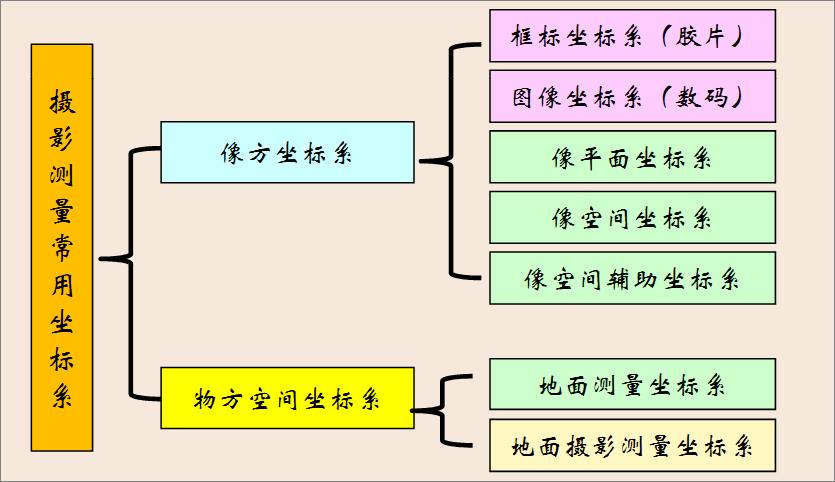
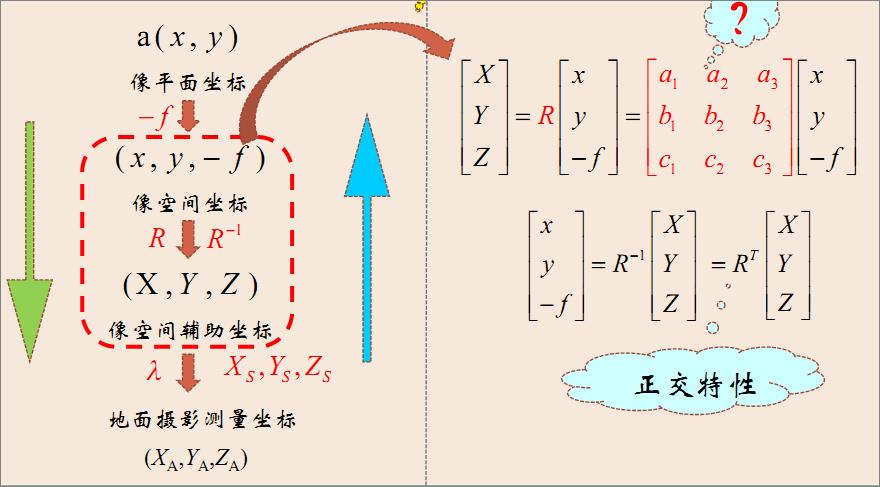
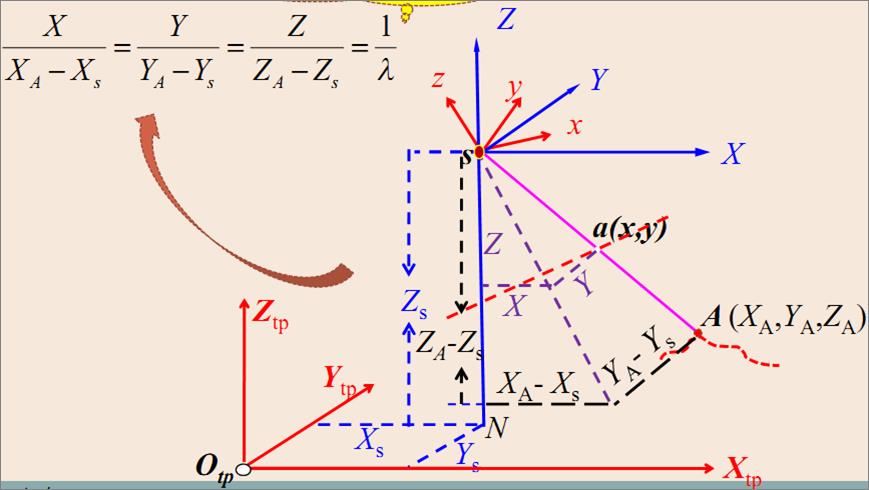
1. 摄影测量常用坐标系

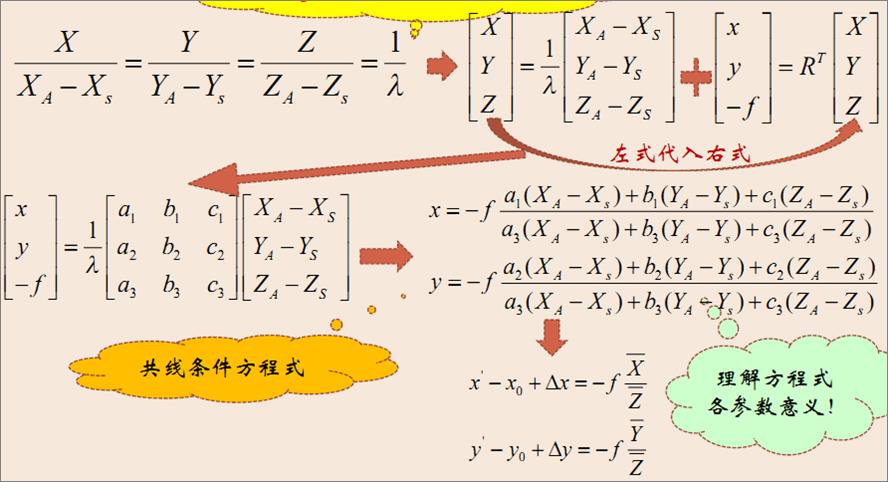
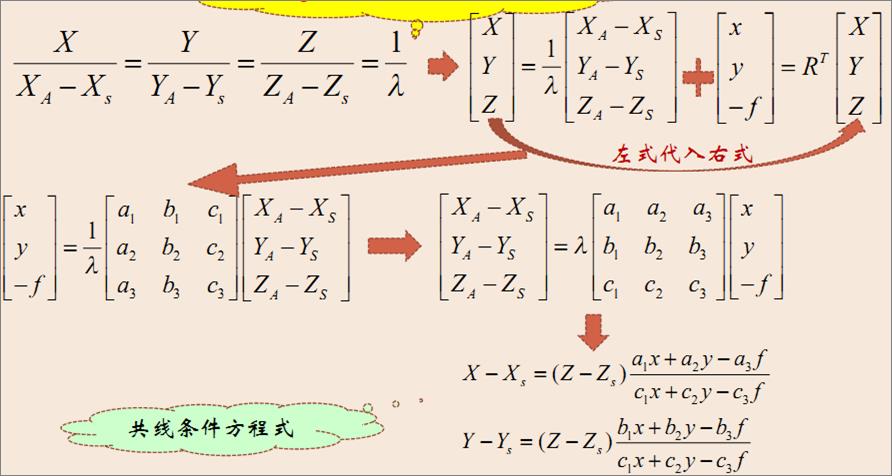
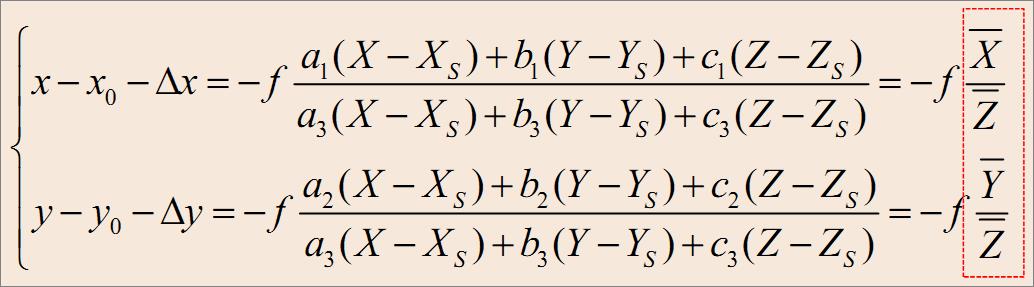
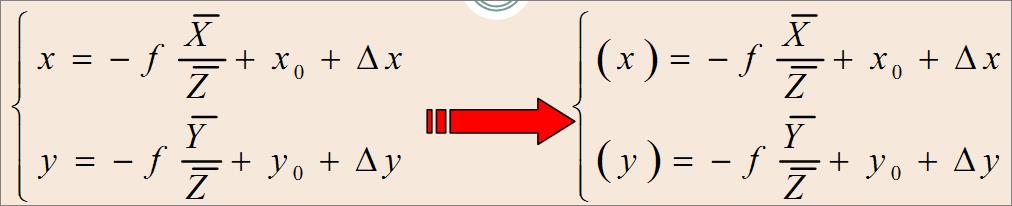
2. 共线条件方程
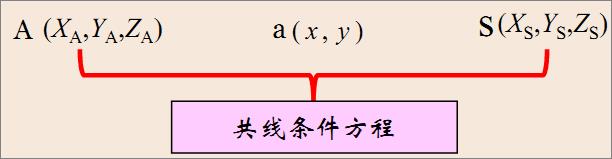
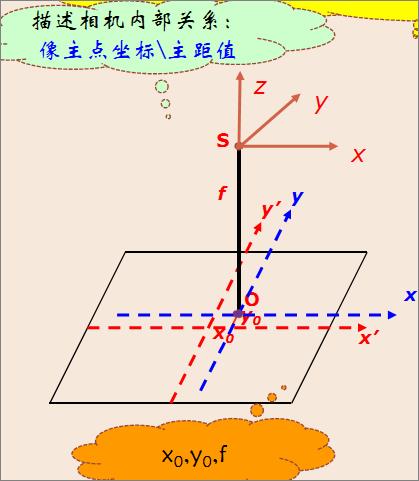
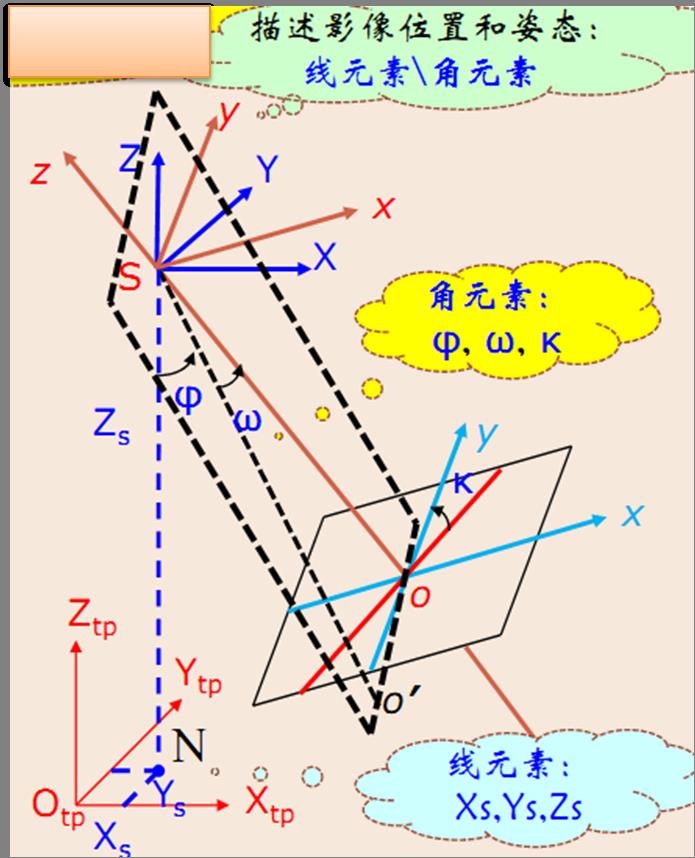
(1)影像内、外方位元素(重要组成部分)
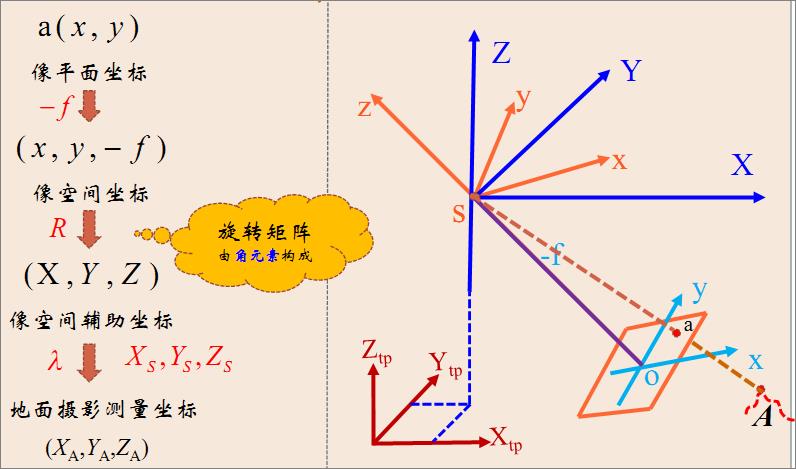
(2)点的坐标变换(方程推导主线)
(3)方程式推导(数学表达式)
>>影像内、外方位元素
>>点的坐标变换
>>方程式的推导
回顾:摄影测量中的数字投影基础;单像空间后方交会;空间前方交会严密解;光束法平差的基本数学模型;利用DEM制作数字正射影像图;求像底点坐标;利用DEM进行单张像片测图;影像模拟。
近景摄影测量作业流程:
(1)制定整体计划及实施方案:流程、设备选择、精度评估
(2)影像获取:照明、摄影方式、控制、影像拍摄
(3)摄影测量处理:影像处理、像片解析、初级产品生成
(4)应用:建模、挖方计算、变形分析、运动分析
非量测摄影机(胶片)
非专为量测目的而设计,内方位元素未知,光学畸变差大,无底片改正格网,无外部定向装置等等;
包括普通135、120型照相机、一步照相机、普通立体相机、全景摄影机、电影摄影机、电影经纬仪、高速摄影机、水下摄影机、X射线机、鱼眼物镜摄影机等等;
特点:自动曝光、自动对焦、对焦距离更近、镜头配备更丰富、可与GPS集成、水下摄影、感光材料更丰富;

摄像设备:近景摄影测量的摄像设备是各类固态摄像机,可以直接获取被测目标的数字影像。
固态摄像机的核心部分是光敏元件,主要包括:
1. CCD
2. CID
3. PSD
4. CMOS
光敏元件与物镜系统结合构成固态摄像机。
摄像设备的特点:
1. 全固化,体积小,重量轻;
2. 像元几何位置精度高,且不会变动(不需要框标标定内方位元素,不需要格网改正底片变形);
3. 具有快速的影像获取速度,普通CCD摄像机可达到25-30幅/每秒;
4. 可与计算机相连,进行实时处理;
5. 可选取不同传感器,探测不同波长的发光物体;
6. 像幅小:一般:1/2~1/3英(12.7mm~8.47mm对角线长度);中等大小:1.25英寸(31.75mm);较大幅面:3.34英寸(84.84mm);->全画幅(24mm×36mm)。
7. 像元大小固定—CCD单元大小;
8. 存在电学误差;
CCD摄影设备的分类:
按结构:线阵CCD相机;面阵CCD相机。
按性能:标准视频幅面摄像机;高分辨率电视摄像机;静止视频画面照相机。
其中,线阵CCD相机是指CCD感光单元有序排列成一线的传感器。为摄得景物影像,一般用机械的方法,使被摄景物与线阵CCD图像传感器间产生相对移动。
面阵CCD相机属于框幅式相机。
标准视频幅面摄像机:对角线长度一般1/3~1/2英寸(8.5mm~12.7mm),相应的芯片有效面积4.9mm×3.7mm~6.4mm×4.8mm(按4:3)。
高分辨率电视摄像机:一般用于科研或特殊用途,分辨率达到几百万像素以上,甚至达到几千万像素;
静止视频画面照相机:数码相机,分辨率多种,功能多寡不一。
摄像方式
1.正直摄影方式
摄影时两摄影机主光轴相互平行且垂直于摄影基线的摄影方式。
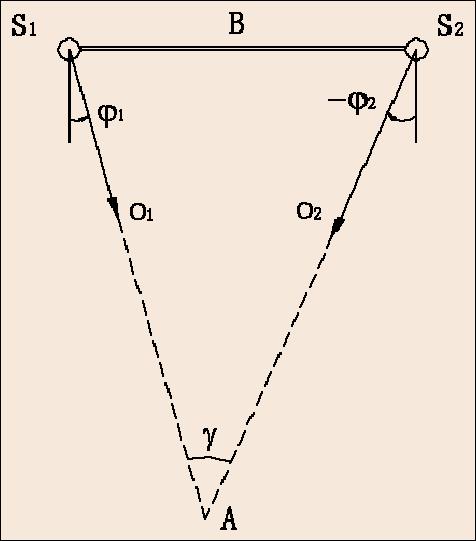
2.交向摄影方式
摄影时两摄影机主光轴大体位于同一平面内,且不平行、不同时垂直于摄影基线的摄影方式。
常采取100%重叠方式。
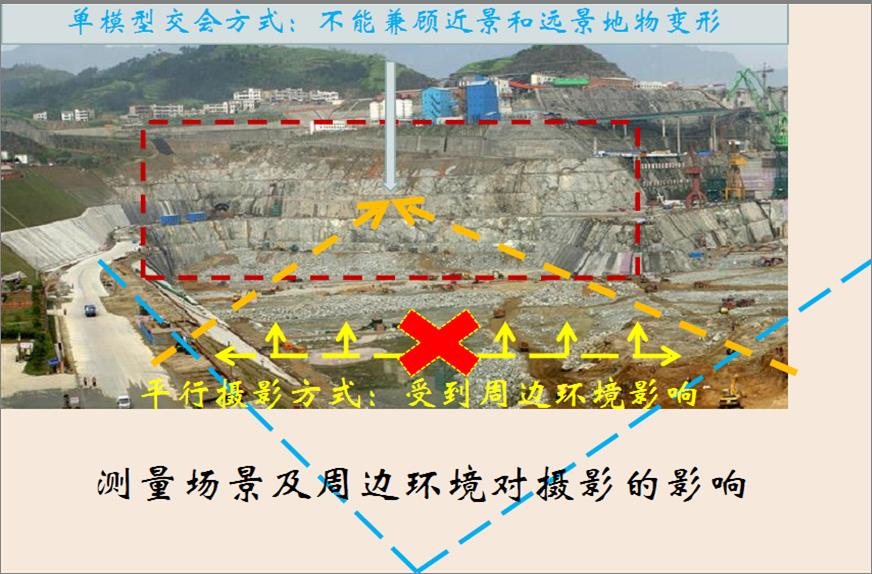
单模型交会方式:不能兼顾近景和远景地物变形、交会精度
>>模型基高比较小情况:近景被摄物体具有合适交会角,影像变形也不大;但是对于远景被摄物体,交会角太小,测量精度有限;
>>模型基高比较大情况:远景被摄物体具有合适交会角,影像变形也不大;但是对于近景被摄物体,交会角可能太大,影像变形太大,不利于自动化匹配;
>>交会角、影像变形、自动化匹配和测量精度几个关键因素相互制约,是地面近景摄影测量需要解决的关键问题;
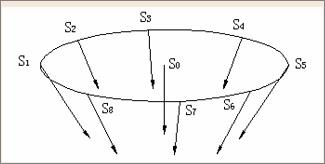
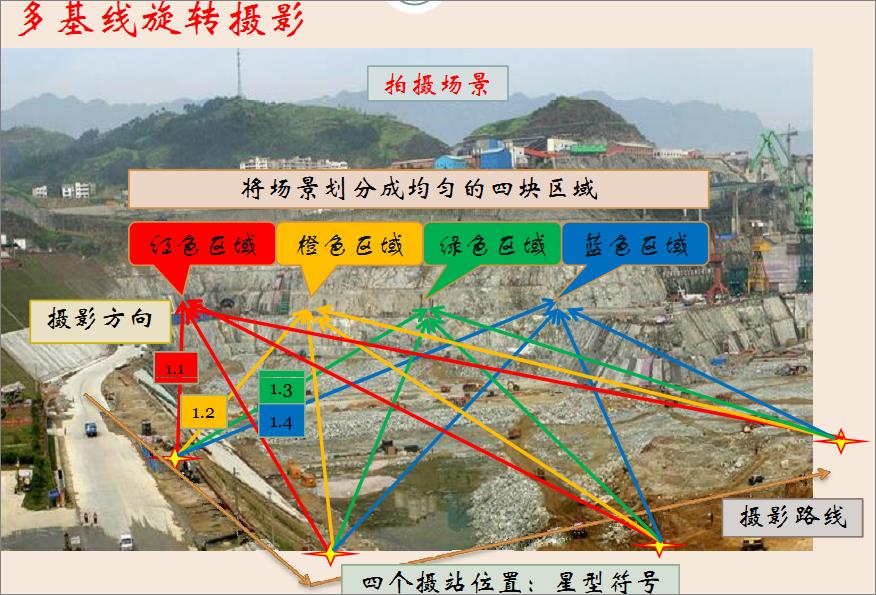
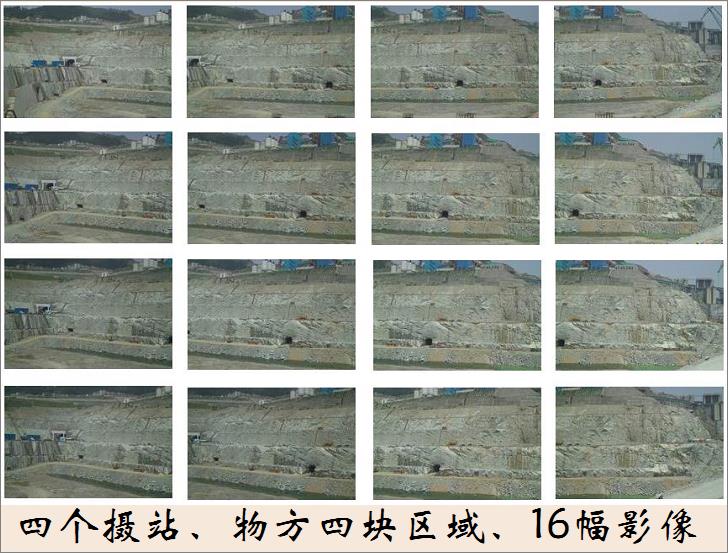
可以采用多重交向摄影方式
多基线旋转摄影方式
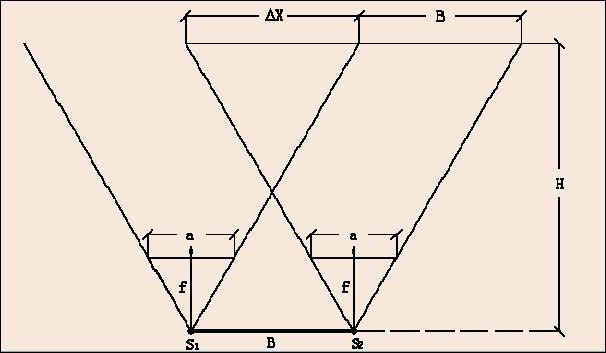
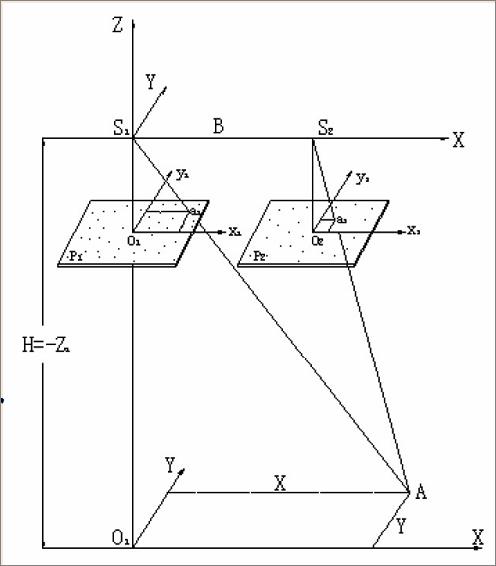
正直摄影方式的精度估算式
以左摄影中心为原点,两摄影中心的连线(摄影基线)作为X轴;设物方有一点A(X,Y,Z),在两张像片上的对应像点为a1(x1,y1,),a2(x2,y2);设航高H、主距f、基线B、左右视差p,左右视差中误差mp、像点x方向中误差mx、y方向中误差my;
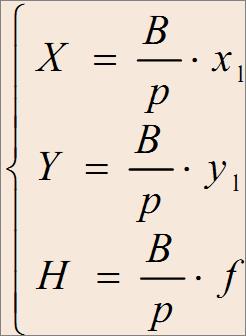
1. 以(x,y,p)为观测值的估算式
在不考虑摄影基线m 和主距误差m,而仅以(x,y,p)为误差源的情况下:
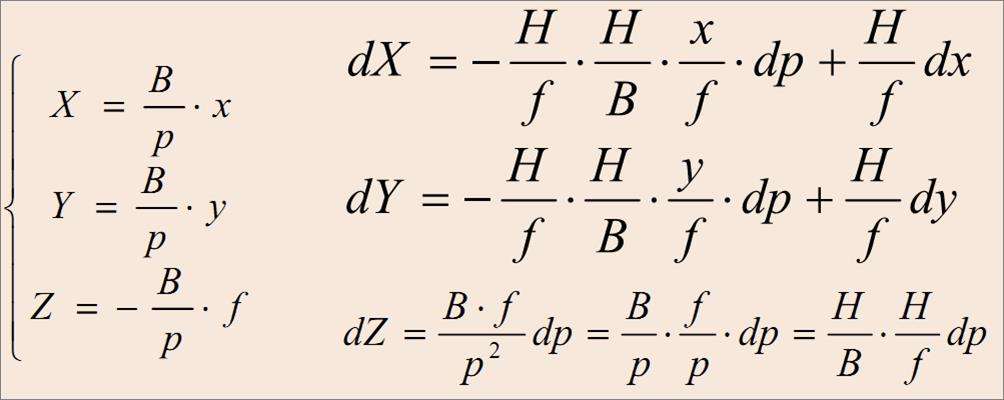
根据误差传播律可得:
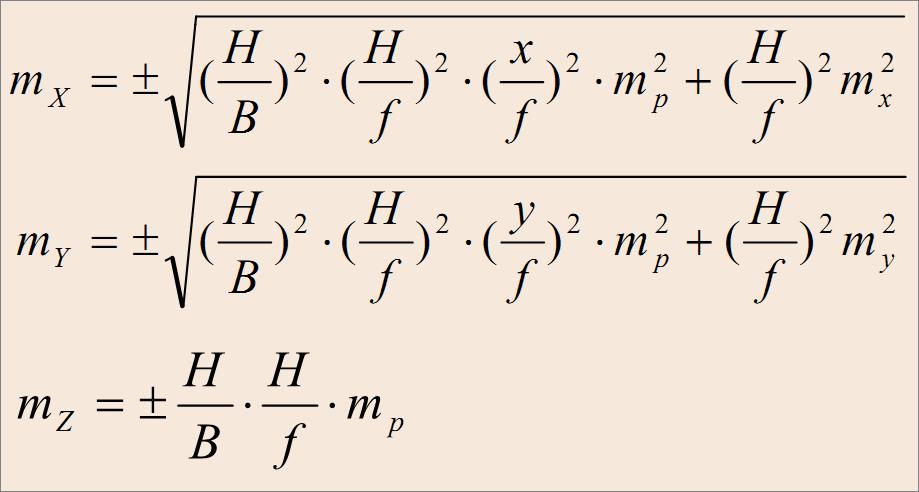
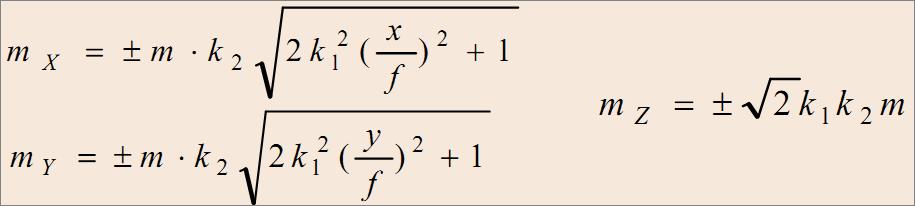
其中,k1=H/B称为构形系数,与交会图形有关;k2=H/f为摄影比例尺分母;
则上述中误差可简化为:

以(x1,y1, x2,y2)为观测值的估算式
>>因为左右视差p=x1-x2,则dp=dx1-dx2;
>>根据误差传播规律![]()
>>像点量测误差在x、y方向相同:mx=my=m;mp=√(2).m
代入立体观测估算式,有:
在实施之前需要根据估算式估算精度,具体要求如下:
>>应尽可能缩小比例尺分母系数k2,即尽可能缩小摄影距离或者选择较大的摄影主距;
>>尽可能缩小构形系数k1,即加大基高比;
>>为了提高物方点的测量精度,应提高像点位置的量测精度和去除影响像点位置的各类误差;
>>一般情况下,深度方向的误差M 最大,即用下式来评价摄影测量精度;
![]()
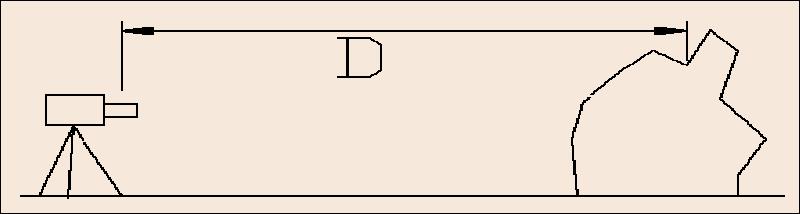
景深与曝光时间的确定
1. 有关概念
(1)调焦距D:摄影中心与调焦最清晰点间的距离。通俗的说即为物距。
近景摄影测量的控制:借助控制点或相对控制,把近景摄影测量网纳入给定的物方空间坐标系。
基于共线条件方程式的近景像片解析处理方法
>>模拟法近景摄影测量
>>解析法近景摄影测量(基于共线条件方程式、前方交会、后方交会、直接线性变换解法、基于共面条件方程式)
>>数字近景摄影测量
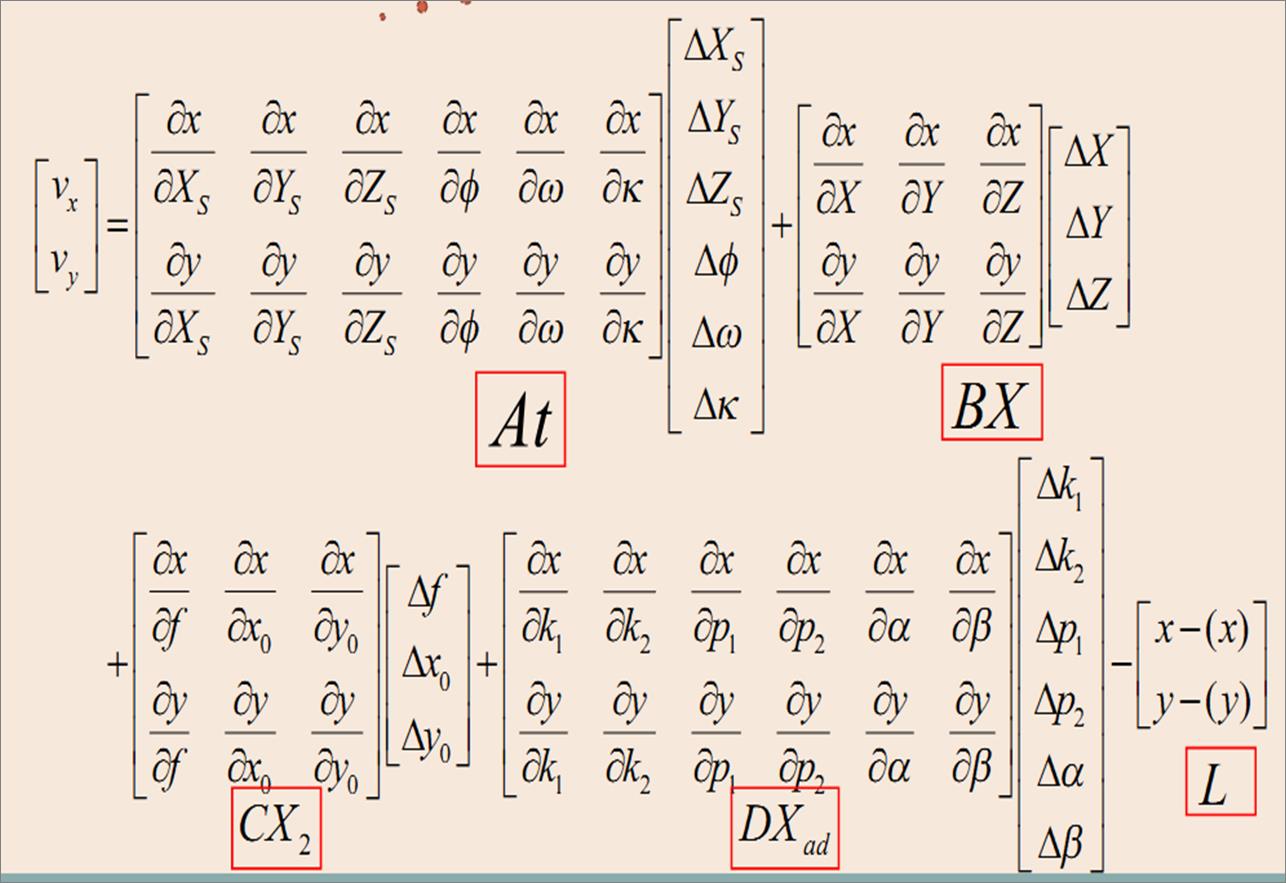
一、基于共线条件方程式的像点坐标误差方程的一般式



以上是关于利用摄影测量进行地形建模的介绍的主要内容,如果未能解决你的问题,请参考以下文章