OpenMMLab 实战营打卡-第6课
Posted 拔丝红薯有点儿咸
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenMMLab 实战营打卡-第6课相关的知识,希望对你有一定的参考价值。

本节内容: 语义分割理论课
语义分割的算法概述和技术演进、常见的一些技巧和算法
什么是语义分割?
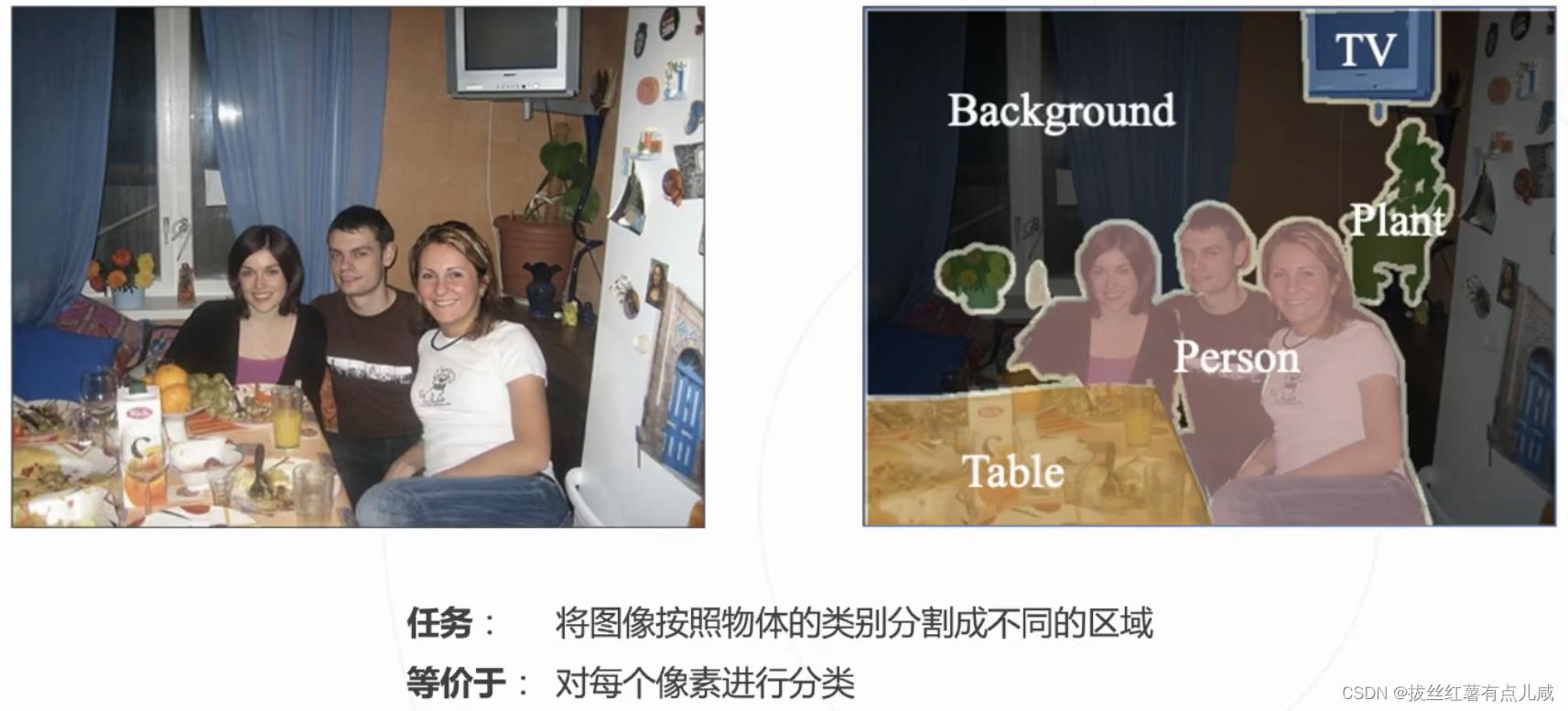
表面上是图像语义分割,实际上是把像素粒度进行图像分类(细粒度,逐像素),特别应用在人像背景抠图、自动驾驶、医疗影像分析和智能遥感领域里。
语义分割只考虑像素的类别,不去区分每个物体。
实例分割在语义分割基础上区分每一个物体,分割同类别不同物体。
全景分割的背景只考虑类别,前景区分每一个物体。

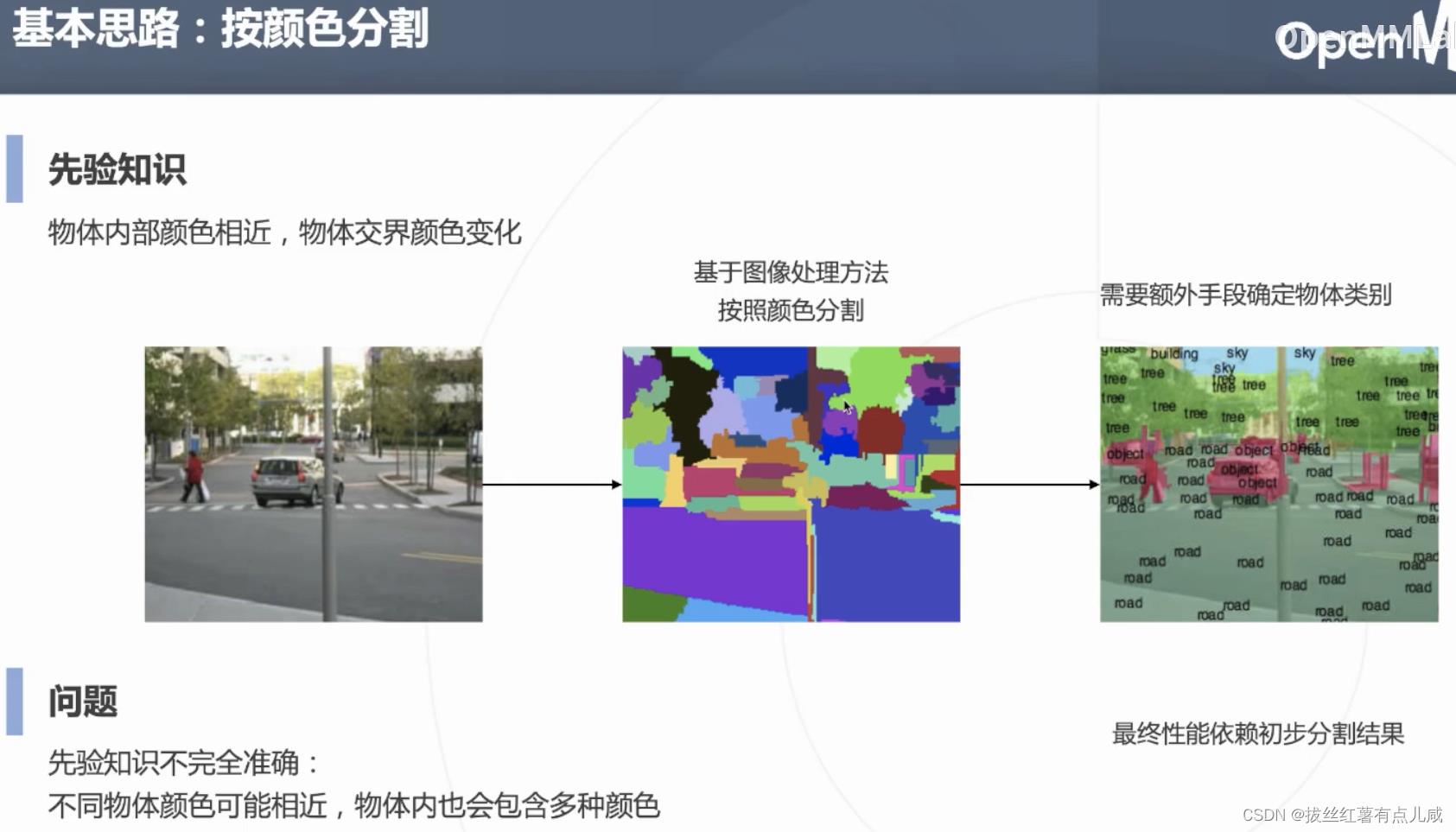
最早期的思想是按照颜色进行分割
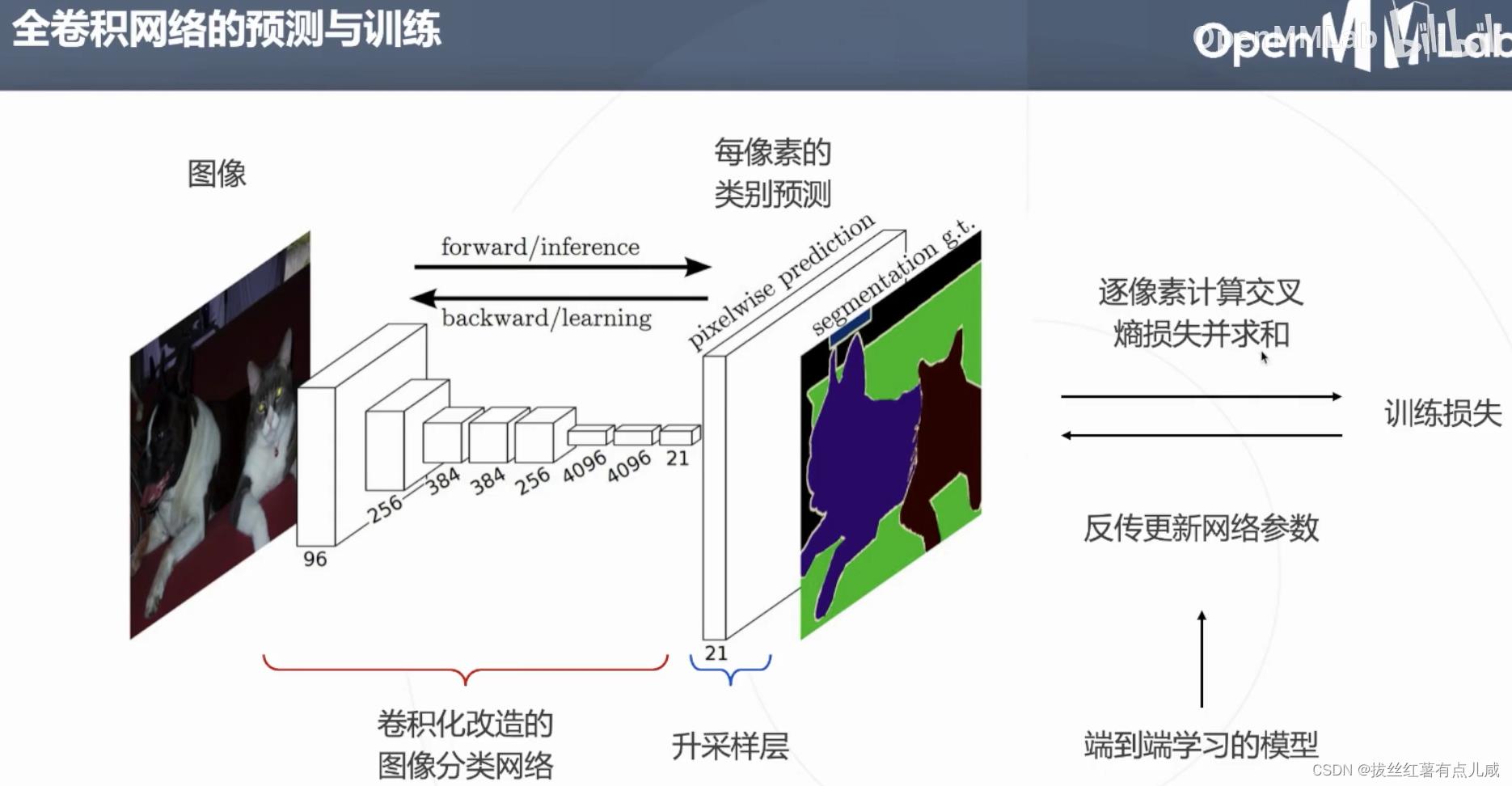
后来随着卷积网络的发展,逐像素进行分类

改进——
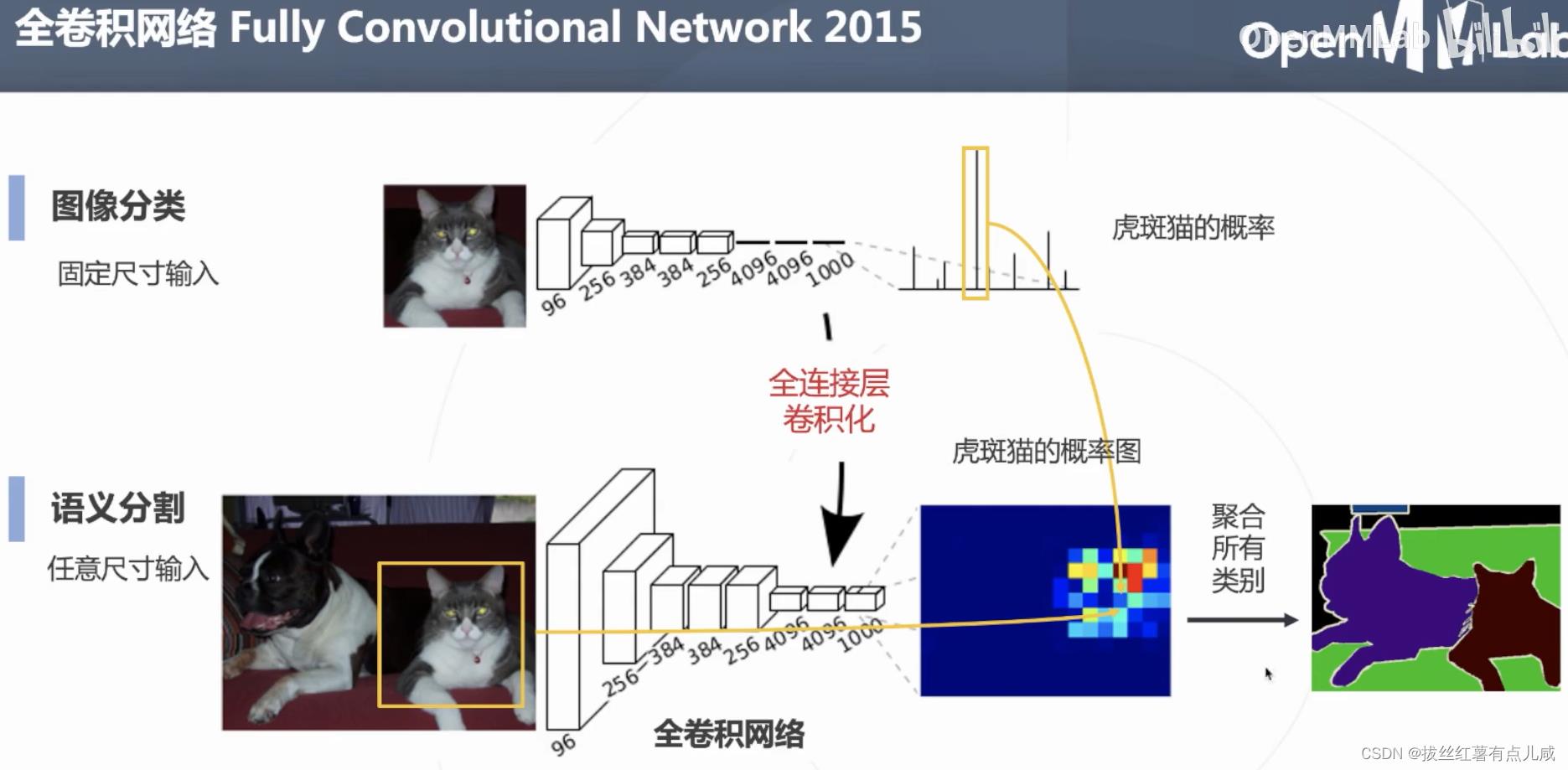
把全图输入到卷积神经网络里面,再在基础上滑窗
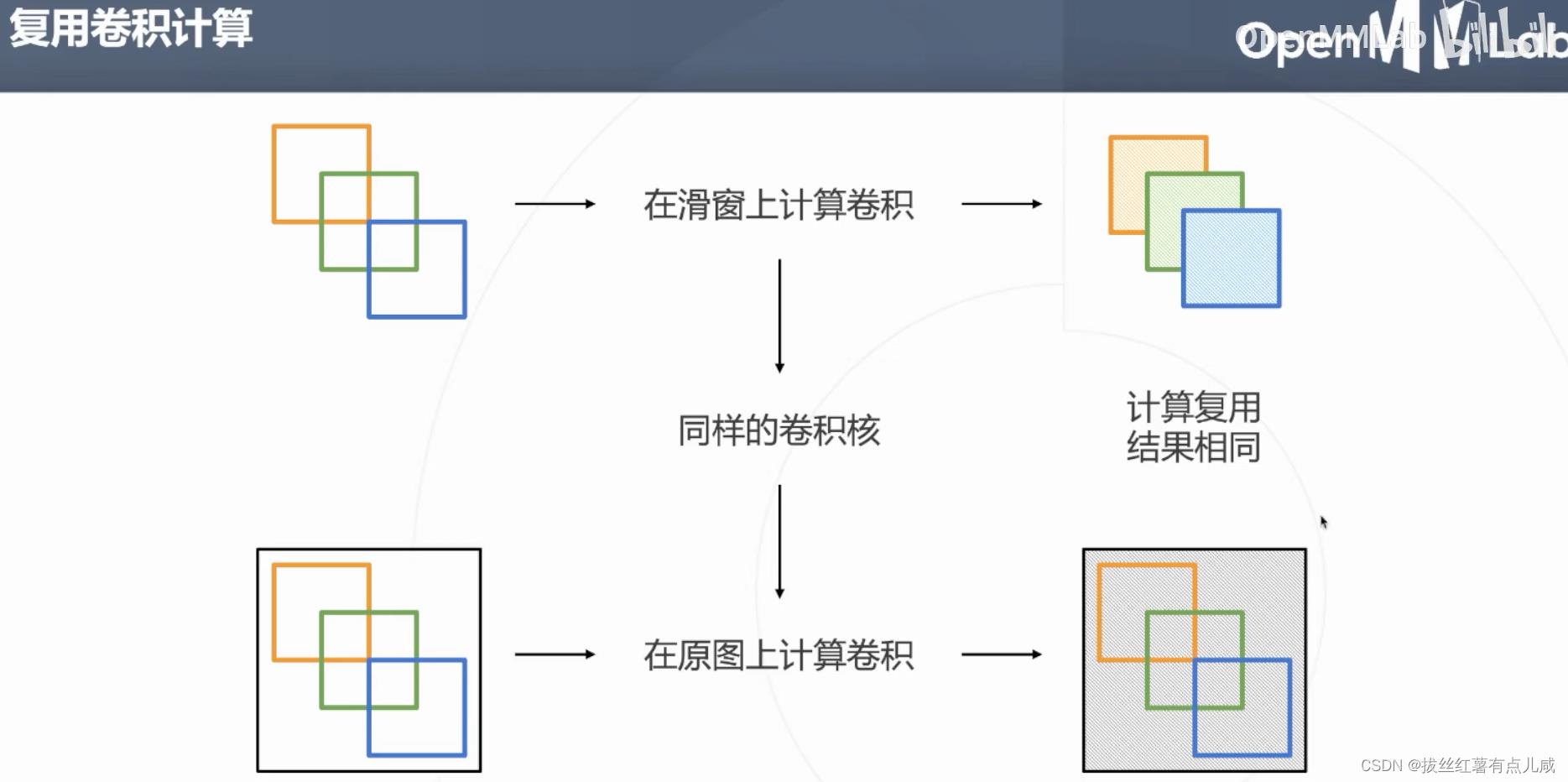
这样所有的滑窗都共享
问题是全连接层要求固定输入大小,如何兼容任意大小的输入
解决方法是全连接层的卷积化
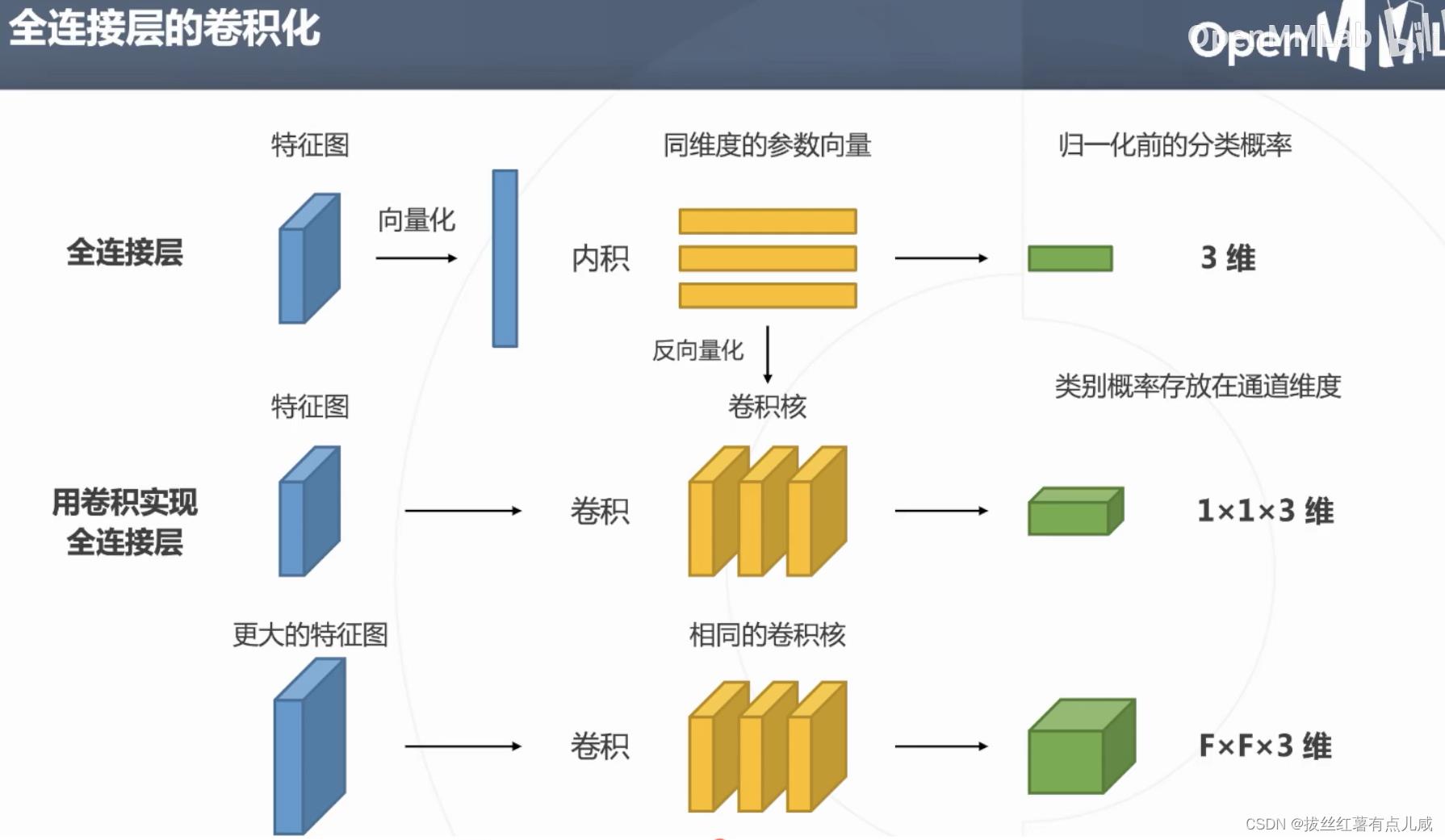
变成全卷积网络,兼容任意尺寸的输入

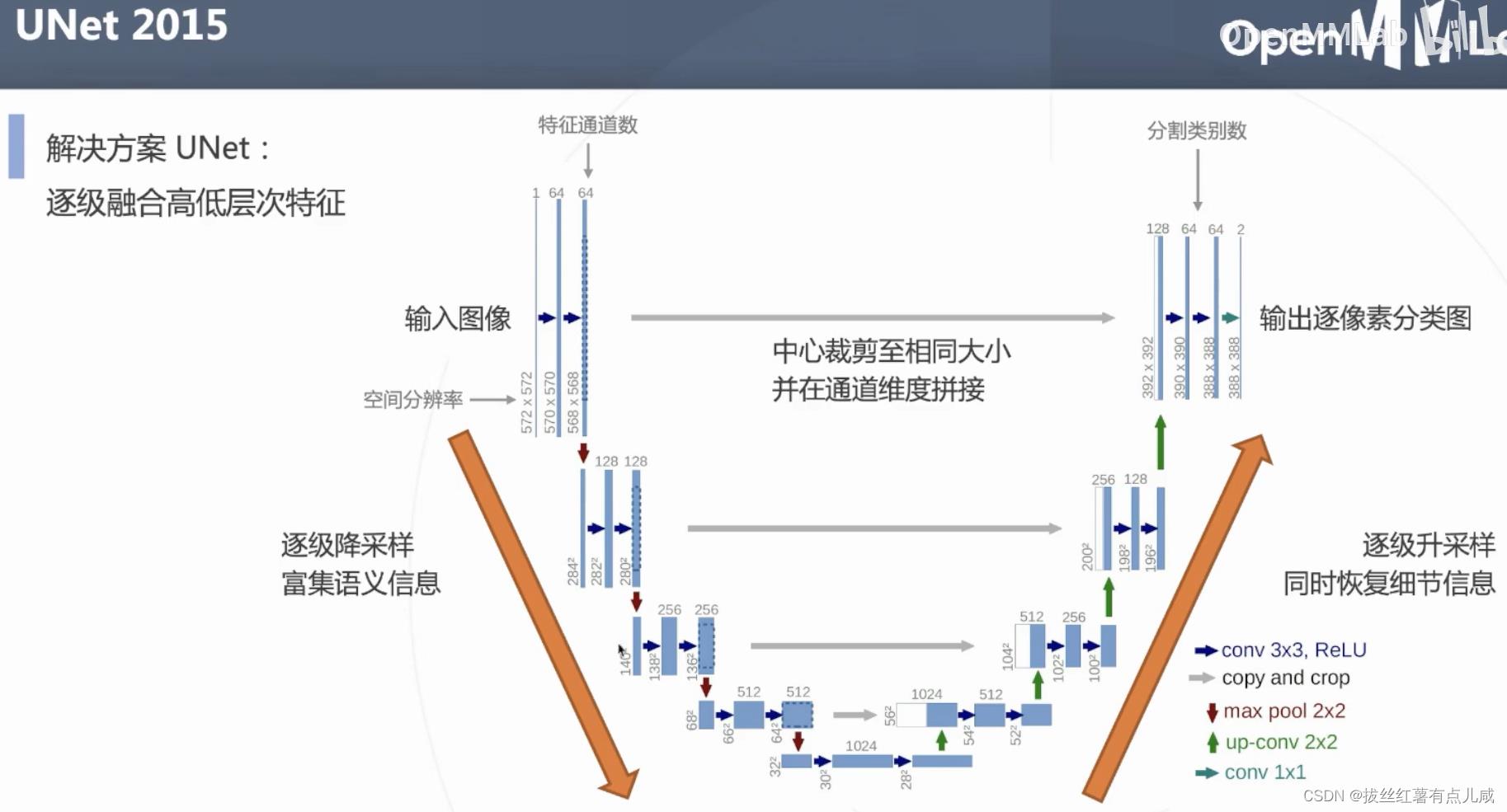
上下文信息
上下文指的是图像周围的内容,可以帮我们做出更准确的判断
如何获取上下文信息,要求感受野足够的大,能看到周围的大范围信息。传统网络感受野受主干网络结构限制。
PSPNet 2016
多尺度池化

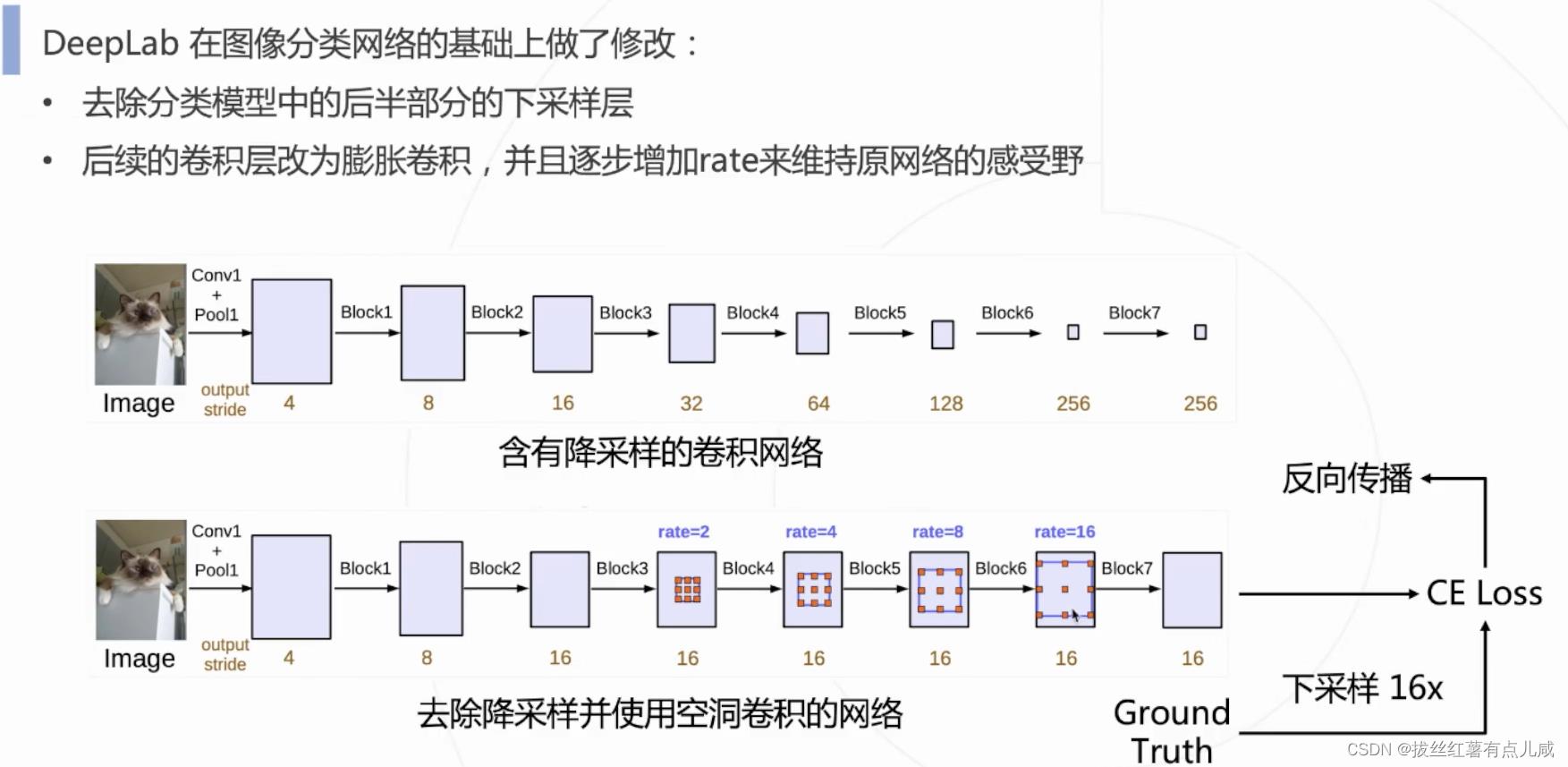
DeepLab系列

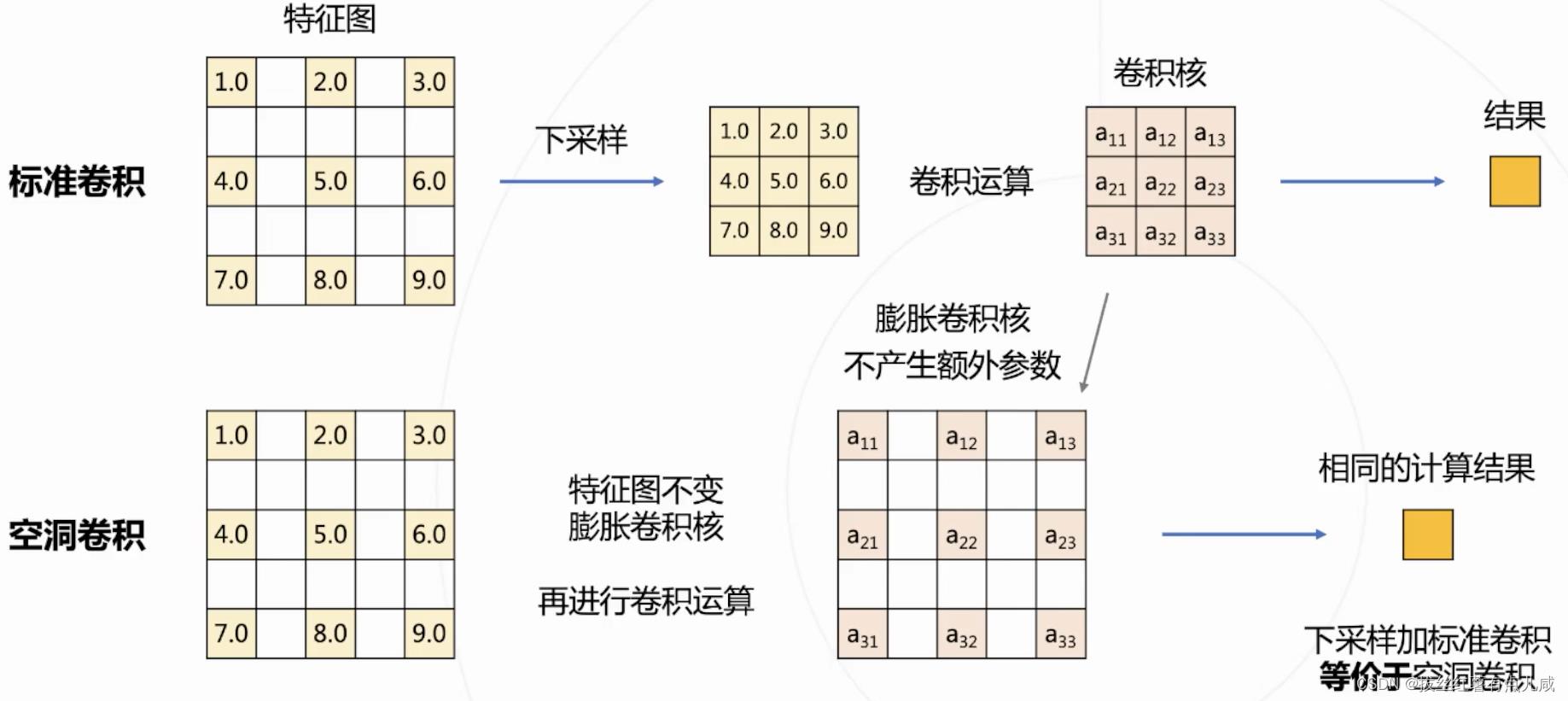
空洞卷积解决下采样问题
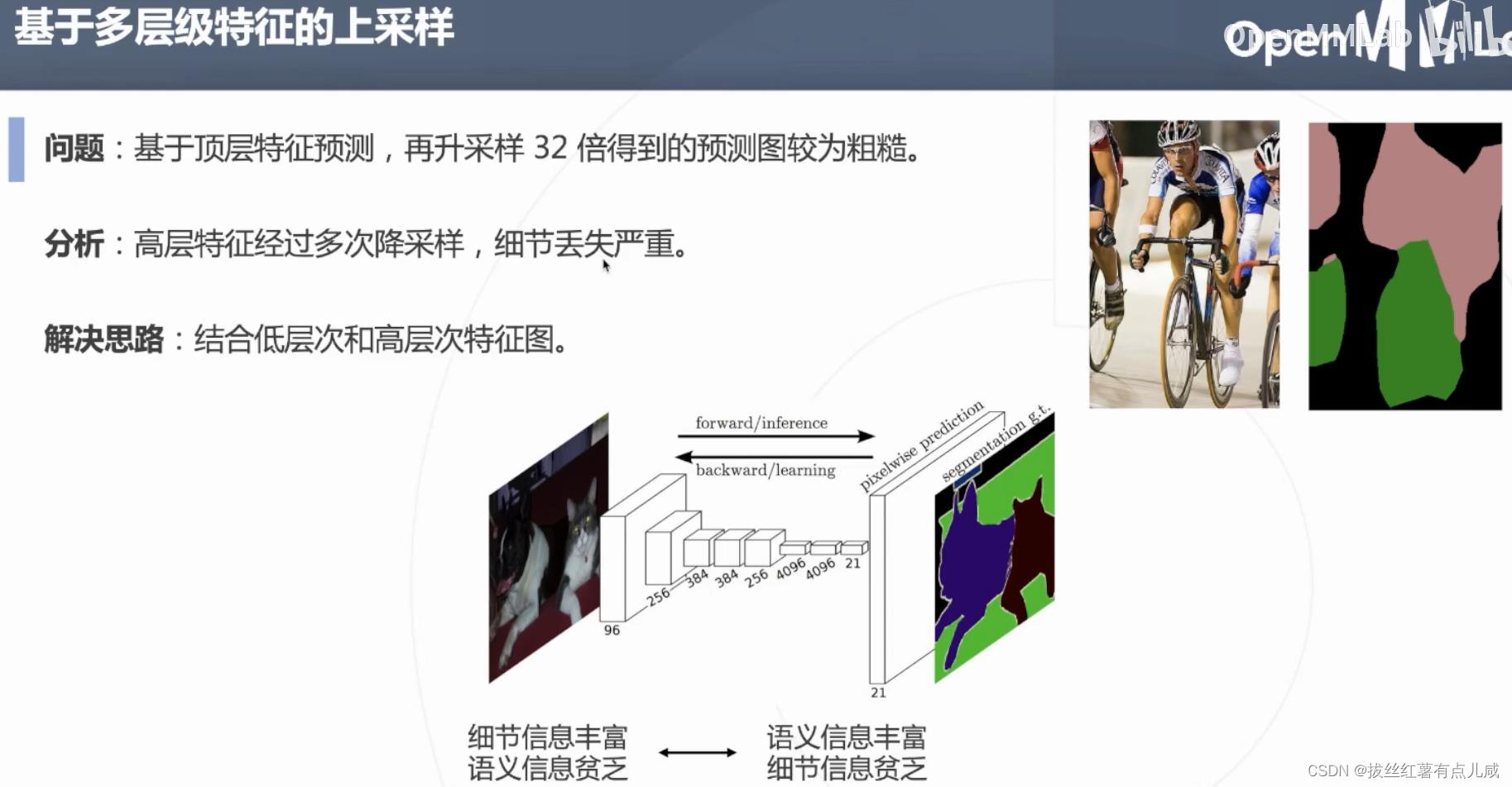
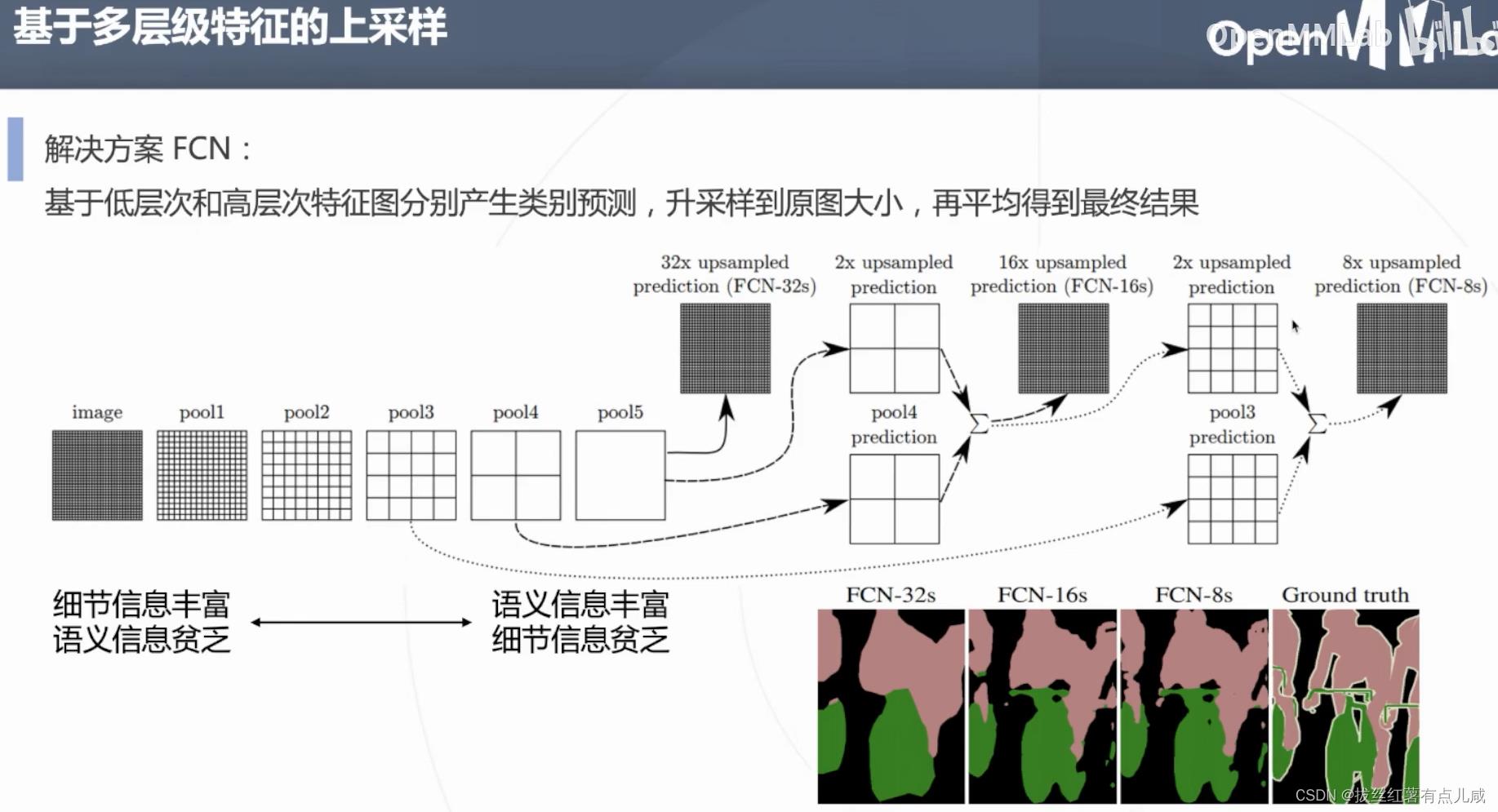
目标是在卷积过程中保留特征图的长宽,不要下采样,因为下采样会丢失空间信息,图像分割不想丢失空间信息


条件随机场CRF (后处理方法)
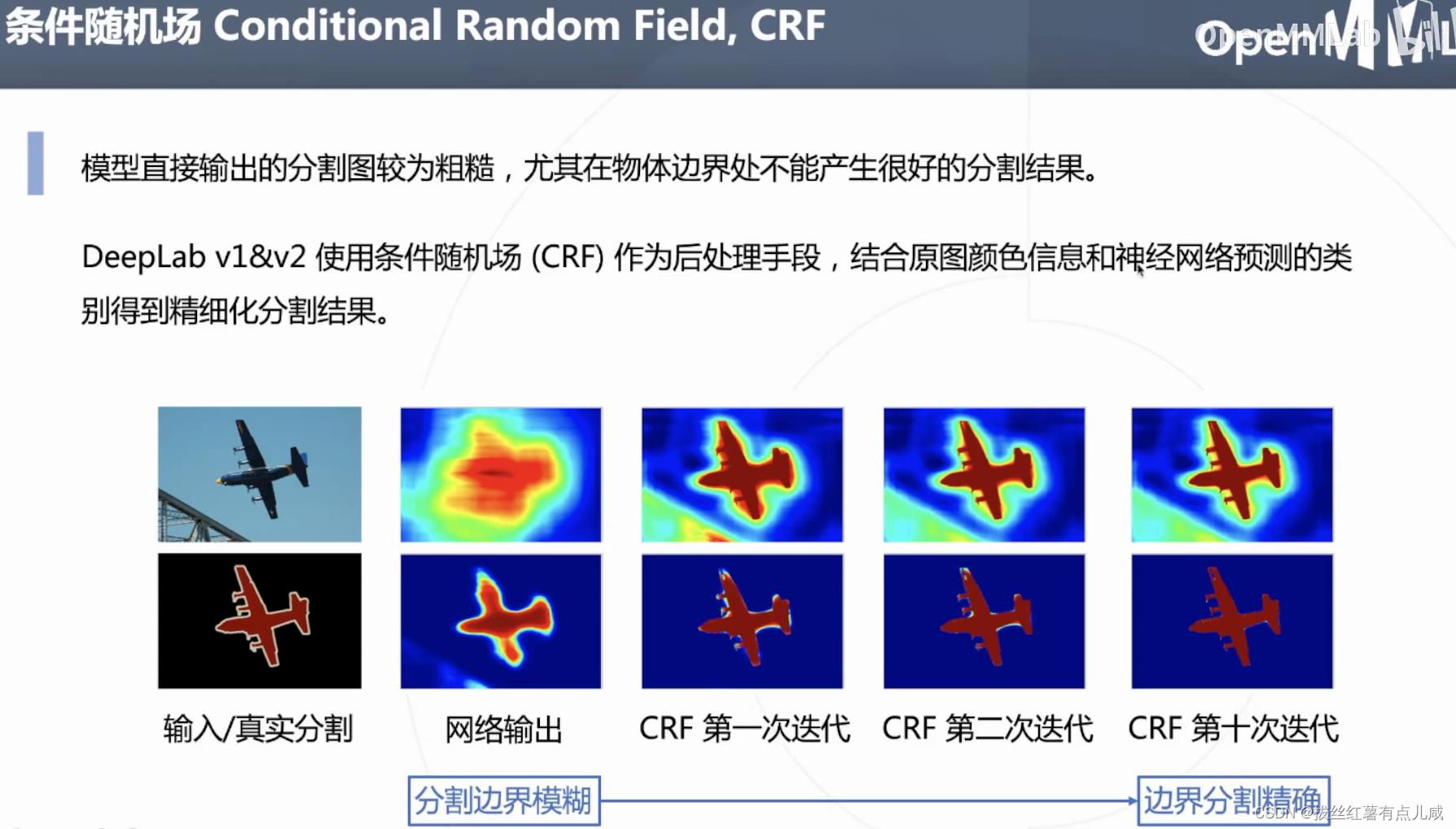
CRF是一种概率模型。
鼓励仅在原图颜色边界处产生类别变化。
内部鼓励产生平滑的结果。
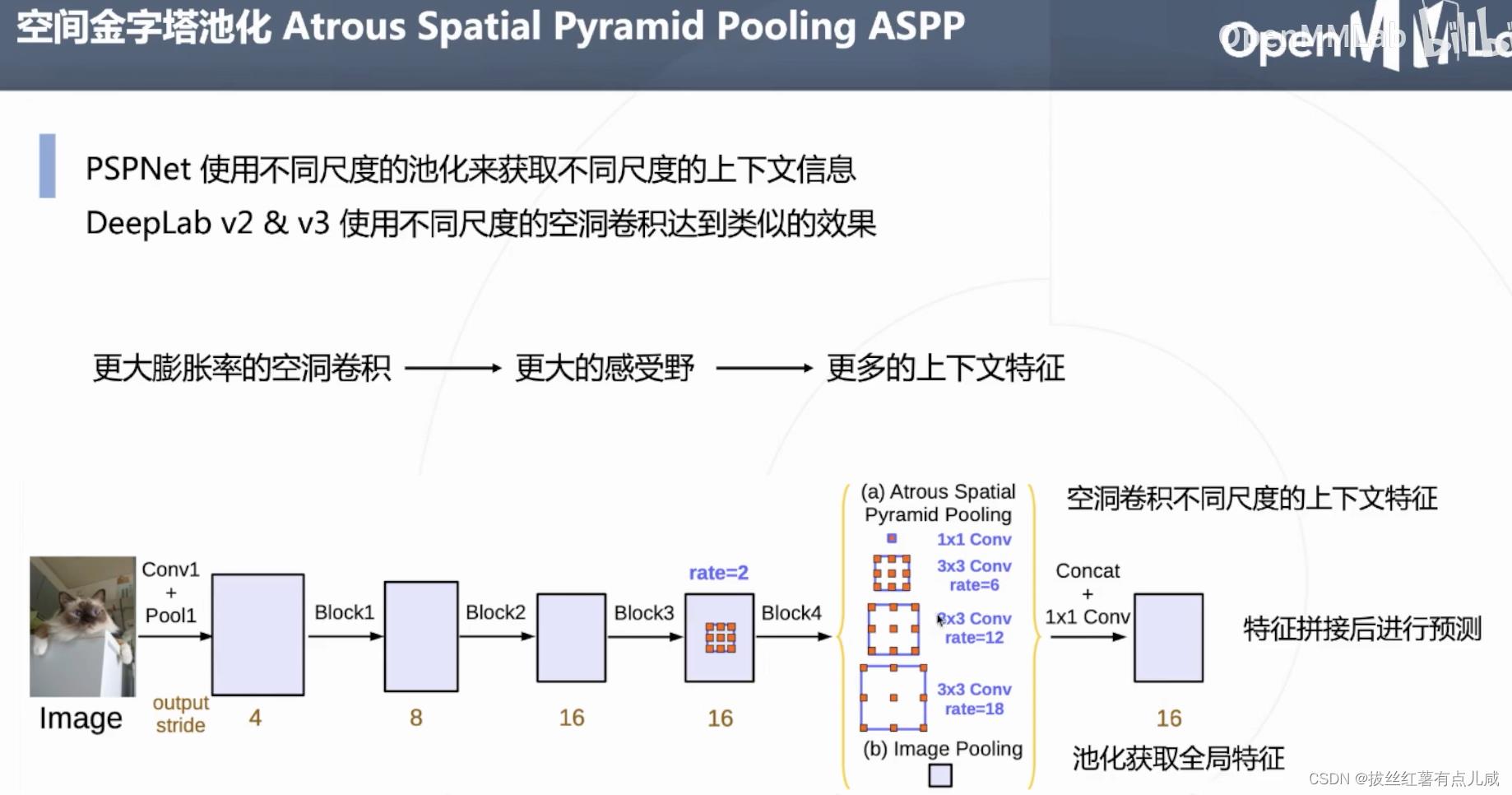
空间金字塔池化ASPP
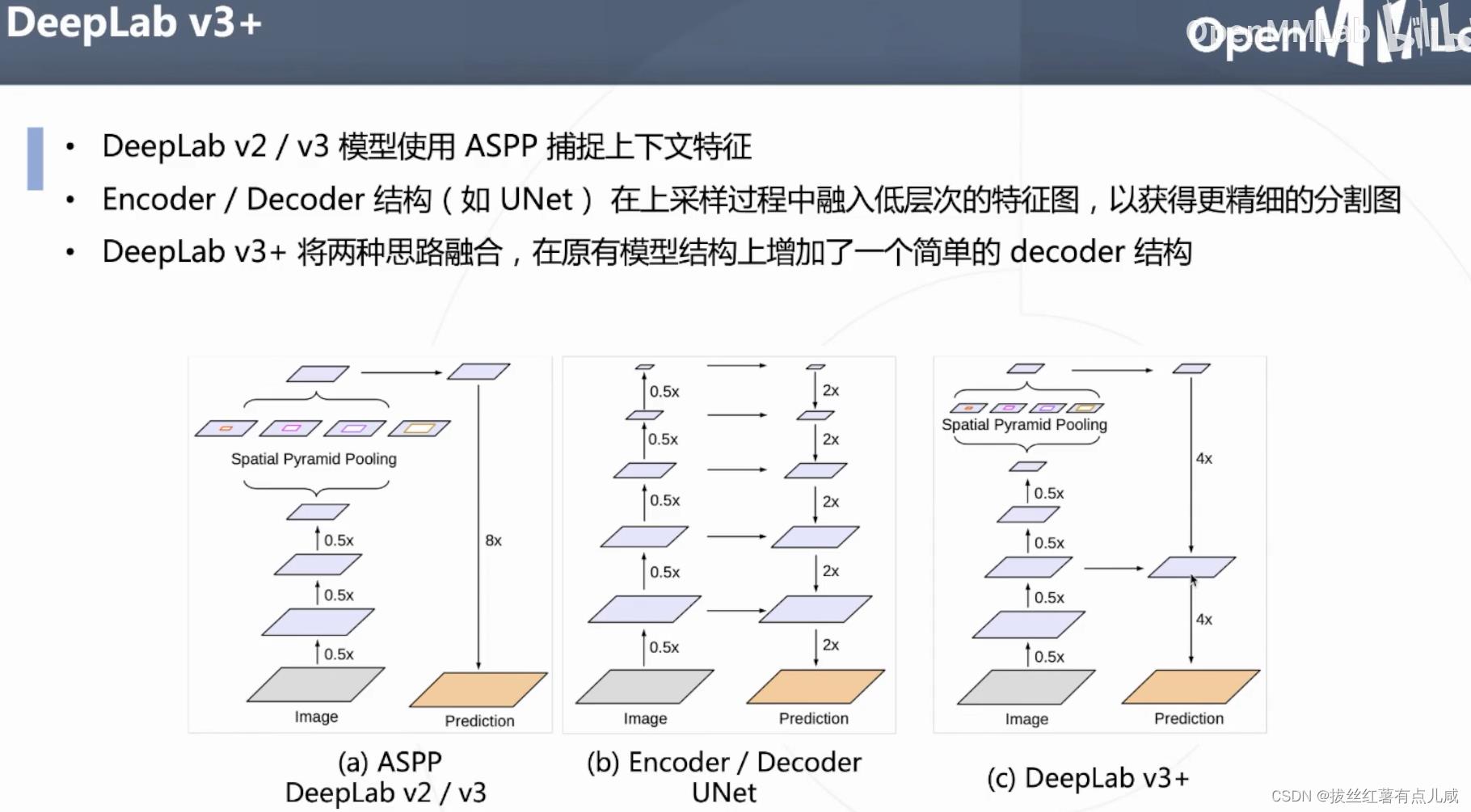
DeepLab v3+

语义分割算法总结

基于交并集的评估指标

比较预测和真值

以上是关于OpenMMLab 实战营打卡-第6课的主要内容,如果未能解决你的问题,请参考以下文章