OpenMMLab 实战营打卡 - 第 六 课 语义分割
Posted 苦瓜汤补钙
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenMMLab 实战营打卡 - 第 六 课 语义分割相关的知识,希望对你有一定的参考价值。
(六)什么是语义分割?把像素进行分类。OpenMMLab AI实战营 第6课
文章目录
(1)全卷积网络 Fully Convolutional Network 2015
4.条件随机场 Conditional Random Field, CRF
5.空间金字塔池化 Atrous Spatial Pyramid Pooling ASPP
前言
OpenMMLab AI实战营第六课!语义分割是目标检测和图像分类的进阶工作,它在像素级别给图像内容做标注,把图片中不同的物体分割开。本课会带大家去学习语义分割工具箱 MMSegmentation ,课程链接:6 语义分割算法基础_哔哩哔哩_bilibili
一、什么是语义分割?
语义分割就是把一个图像上所有像素都把它归类进行分类,从宏观上来看就是抠图的效果。所以表面上来看,它是图像分割,但本质上是像素密度的图像分类。
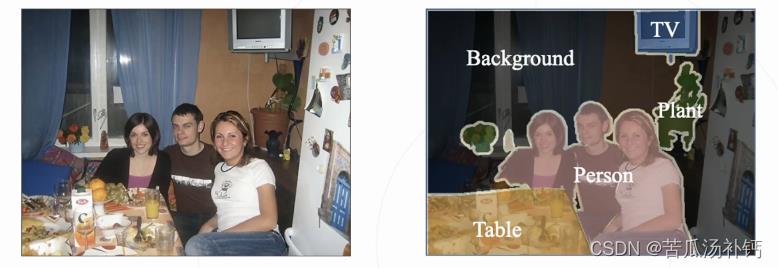
- 任务:将图像按照物体的类别分割成不同的区域
- 等价于:对每个像素进行分类
语义分割的应用
语义分割应用广泛,特别是在医疗影像和自动驾驶领域。对于无人驾驶汽车需要以像素的力度感知周围的环境,对于医疗影像而言需要以像素的力度去定位病变区域。
自动驾驶车辆,会将行人,其他车辆,行车道,人行道、交通标志、房屋、草地与树木等等按照类别在图像中分割出来,从而辅助车辆对道路的情况进行识别与认知。

医疗影像分析,通过图像分割技术,辅助进行 医疗诊断。如右图,识别脑部 肿瘤异物的位置。

在很多的互联网应用中具有人像抠图功能,人像抠图其实就是语义分割。如果是在线会议就是实时的语义分割,实时替换视频的背景,在智慧互娱和智能会议场景中,可以通过这种方法增加交互的多样性。人像和背景就是两个类别。

在智能遥感的应用,分辨地表物体的类别,通过右侧分割之后的图像可以看到,红色的部分属于湖泊水流。通过智能遥感能够监测不同季节地表水域的变化,从而辅助农业生产,以及旱灾洪灾的预测等等。

语义分割 vs 实例分割 vs 全景分割

语义分割只管类别,如果有两个物体重合了,语义分割的结果仍是一大片,它不管这是一个物体还是两个物体。
实例分割是在语义分割的基础上,要去区分每一个物体,每一只🐏尽管它们类别相同,但是要区分开。如果两只🐏遮挡了彼此,实例分割仍会给出两个物体(两只🐏)的抠图结果。
全景分割就是仅考虑类别,前景需要区分实体。我们所说的无人驾驶实际上是全景分割。
二、语义分割的基本思路
1.按颜色分割
最早期的语义分割就是按照颜色分割,一个块就是一个物体。按照不同的分层,我们可以获得层次的这种颜色分割图。只按照颜色分割效果很差,先验知识不完全准确。我们需要额外的手段确定物体类别,所以这是一种最朴素最初级的方法。

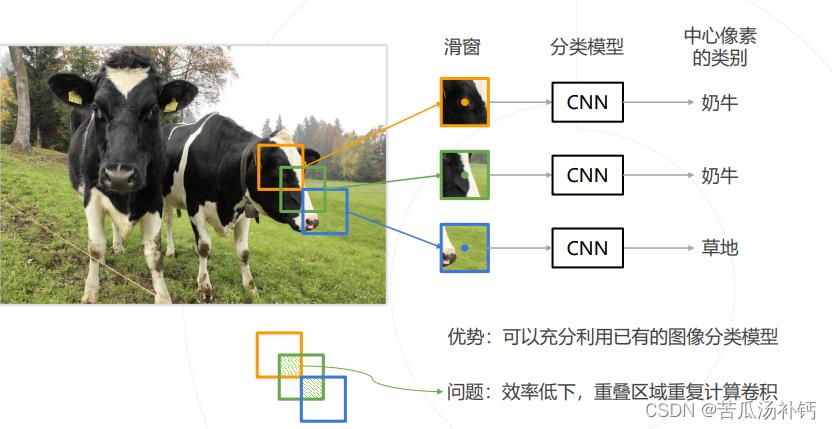
2.逐像素分类
后来有了卷积神经网络,开始按照像素分类。我们把某个像素周围的这个小窗口当成是一张图像,我们把这张图像输入到分类模型里面,给出一个类别作为这个滑窗的这个窗口中间像素的类别结果。只有我们就是实现了像素分类,这种方式称之为滑动窗口。我们用不同尺寸不同大小不同长宽,然后在图像上滑动窗口,每滑动一次就输入到卷积神经网络里面去进行一次类别预测,于是将每一个像素都划一遍就获得了每一个像素的分类结果。滑动窗口无法复用,效率低下。
3.改进:复用卷积计算
把全图输入到卷积神经网络里面,在全图得到的feature map上再运行滑窗,这样至少能让所有的滑窗都共享这个feature map,很好的降低了计算。

4.再改进:全连接层的卷积化
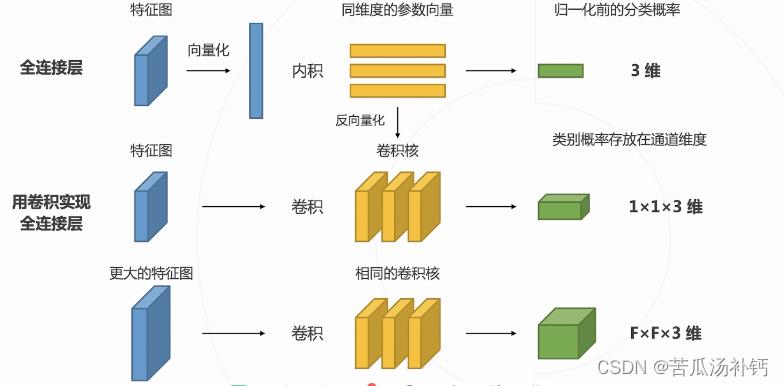
(1)全卷积网络 Fully Convolutional Network 2015
可以兼容任意尺寸的图像输入,最终可以得到某一个类别的特征图,代表这个类别的语义分割结果,我们就把分类网络转成了分割网络。

(2)预测图的升采样
问题: 图像分类模型使用降采样层(步长卷积或池化)获得高层次特征,导致全卷积网络输出尺寸小于原图,而分割要求同尺寸输出。
解决方法: 对预测的分割图升采样,恢复原图分辨率,升采样方案:
- 双线性插值
- 转置卷积:可学习的升采样层
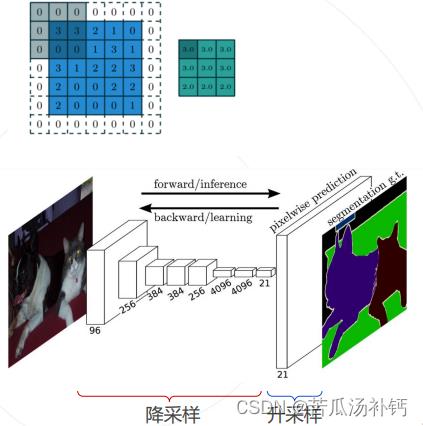
全卷积网络的预测与训练

(3)基于多层级特征的上采样
问题:基于顶层特征预测,再升采样 32 倍得到的预测图较为粗糙。
分析:高层特征经过多次降采样,细节丢失严重。
解决思路:结合低层次和高层次特征图。
解决方案 FCN: 基于低层次和高层次特征图分别产生类别预测,升采样到原图大小,再平均得到最终结果。

解决方案 UNet: 逐级融合高低层次特征。

三、上下文信息
1.上下文的重要性
有歧义的区域:如何肯定图像里的物体到底是什么?

图像周围的内容(也称上下文)可以帮助我们做出更准确的判断。

2.获取上下文信息

方案:增加感受野更大的网络分支, 将上下文信息导入局部预测中。
3.PSPNet 2016

- 对特征图进行不同尺度的池化,得到不同尺度的上下文特征
- 上下文特征经过通道压缩和空间上采样之后拼接回原特征图 → 同时包含局部和上下文特征
- 基于融合的特征产生预测图
四、空洞卷积与 DeepLab 系列算法
1.DeepLab 系列
DeepLab 是语义分割的又一系列工作,其主要贡献为:
- 使用空洞卷积解决网络中的下采样问题
- 使用条件随机场 CRF 作为后处理手段,精细化分割图
- 使用多尺度的空洞卷积(ASPP 模块)捕捉上下文信息
DeepLab v1 发表于 2014 年,后于 2016、2017、2018 年提出 v2、v3、v3+ 版本。
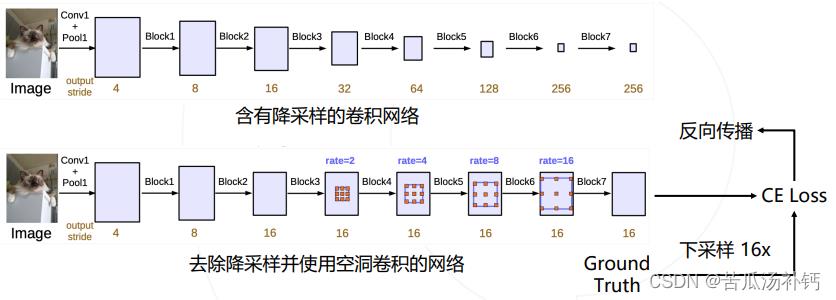
2.空洞卷积解决下采样问题
图像分类模型中的下采样层使输出尺寸变小。
如果将池化层和卷积中的步长去掉:
- 可以减少下采样的次数;
- 特征图就会变大,需要对应增大卷积核,以维持相同的感受野,但会增加大量参数
- 使用空洞卷积(Dilated Convolution/Atrous Convolution),在不增加参数的情况下增大感受野

空洞卷积和下采样

3.DeepLab 模型
DeepLab 在图像分类网络的基础上做了修改:
- 去除分类模型中的后半部分的下采样层
- 后续的卷积层改为膨胀卷积,并且逐步增加rate来维持原网络的感受野
4.条件随机场 Conditional Random Field, CRF
模型直接输出的分割图较为粗糙,尤其在物体边界处不能产生很好的分割结果。
DeepLab v1&v2 使用条件随机场 (CRF) 作为后处理手段,结合原图颜色信息和神经网络预测的类别得到精细化分割结果。
CRF 是一种概率模型。DeepLab 使用 CRF 对分割结果进行建模,用能量函数用来表示分割结果优劣,通过最小化能量函数获得更好的分割结果。
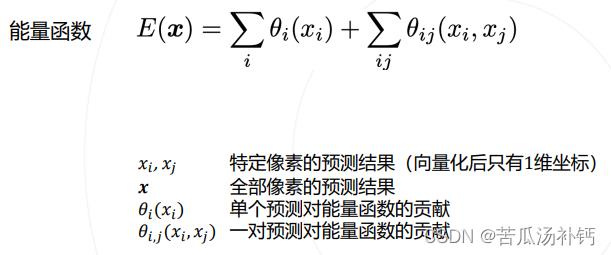
能量函数的意义

5.空间金字塔池化 Atrous Spatial Pyramid Pooling ASPP
PSPNet 使用不同尺度的池化来获取不同尺度的上下文信息。
DeepLab v2 & v3 使用不同尺度的空洞卷积达到类似的效果。

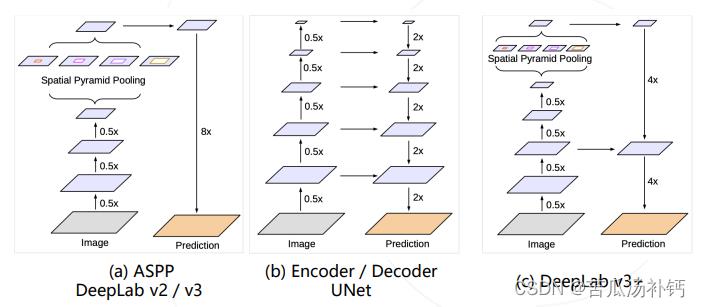
6.DeepLab v3+
- DeepLab v2 / v3 模型使用 ASPP 捕捉上下文特征
- Encoder / Decoder 结构(如 UNet) 在上采样过程中融入低层次的特征图,以获得更精细的分割图
- DeepLab v3+ 将两种思路融合,在原有模型结构上增加了一个简单的 decoder 结构
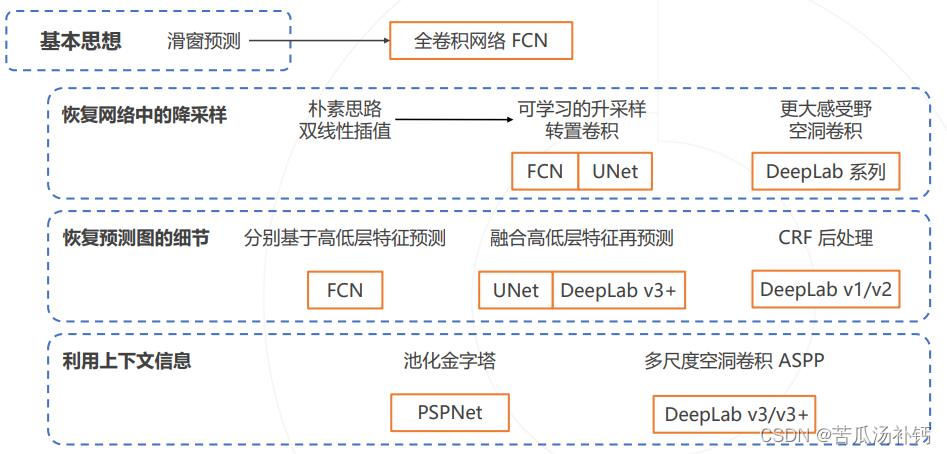
7.语义分割算法总结
五、语义分割模型的评估
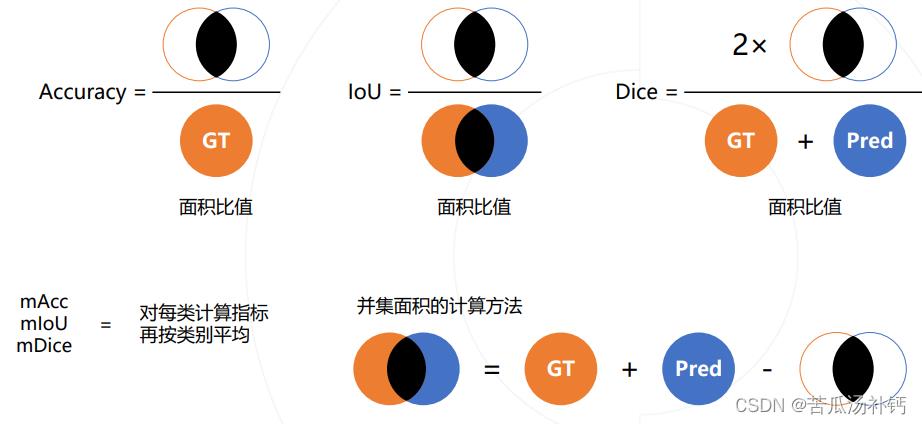
1.比较预测与真值

2.基于交并集的评估指标
六、语义分割工具包 MMSegmentation

代码库: https://github.com/open-mmlab/mmsegmentation
文档: https://mmsegmentation.readthedocs.io/en/latest/
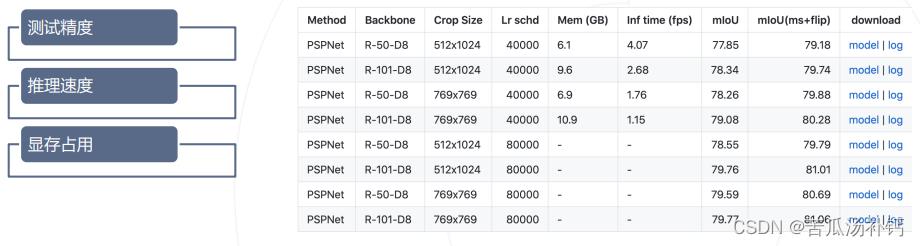
MMSegmentation算法丰富,20+ 算法、370+ 预训练模型,统一超参,全面的性能标定。
1.项目结构

2.分割模型的模块化设计
MMSegmentation 将分割模型统一拆解为如下模块,方便用户根据自己的需求进行组装和扩展。

(1)分割模型的配置文件
model = dict(
type='EncoderDecoder' OR 'CascadeEncoderDecoder',
pretrained='open-mmlab://resnet50_v1c',
backbone=dict(
type='ResNetV1c',
# ... more options),
neck = None,
decode_head=dict(
type='PSPHead',
# ... more options
loss_decode=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0)),
auxiliary_head=dict(
type='FCNHead',
# ... more options
loss_decode=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=0.4)),
train_cfg=dict(...),
test_cfg=dict(...))(2)主干网络的配置。主干网络输入图像,输出多层次的特征图。
backbone=dict(
type='ResNetV1c',
depth=50,
num_stages=4,
out_indices=(0, 1, 2, 3),
dilations=(1, 1, 2, 4),
strides=(1, 2, 1, 1),
norm_cfg= dict(type='SyncBN', requires_grad=True),
norm_eval=False,
style='pytorch',
contract_dilation=True)3.ResNet v1c
ResNet 50 层以上的模型在 BottleNeck 模块以及 stem 部分(即网络前几层)有一些变形:

(1)主解码头的配置。主解码头从特征图预测分割图。
decode_head=dict(
type='PSPHead',
in_channels=2048,
in_index=3,
channels=512,
pool_scales=(1, 2, 3, 6),
dropout_ratio=0.1,
num_classes=19,
norm_cfg= dict(type='SyncBN', requires_grad=True),
align_corners=False,
loss_decode=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0)),(2)辅助解码头的配置
auxiliary_head=dict(
type='FCNHead',
in_channels=1024,
in_index=2,
channels=256,
num_convs=1,
concat_input=False,
dropout_ratio=0.1,
num_classes=19,
norm_cfg=norm_cfg,
align_corners=False,
loss_decode=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=0.4)),
(3)数据集配置
dataset_type = 'CityscapesDataset'
data_root = 'data/cityscapes/'
data = dict(
samples_per_gpu=2,
workers_per_gpu=2,
train=dict(
type=dataset_type,
data_root=data_root,
img_dir='leftImg8bit/train',
ann_dir='gtFine/train',
pipeline=train_pipeline),
val=dict(...),
test=dict(...))(4)数据处理流水线

(5)常用训练策略

总结
以上就是今天的内容,本文仅仅简单介绍了图像分割及基本算法,而图像分割算法不断更新且种类方法等待我们不断学习与探索。
以上是关于OpenMMLab 实战营打卡 - 第 六 课 语义分割的主要内容,如果未能解决你的问题,请参考以下文章