第三期 轨迹生成——3.运动规划算法的属性
Posted 一起来看流星雨
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第三期 轨迹生成——3.运动规划算法的属性相关的知识,希望对你有一定的参考价值。
在讨论计划算法时,有两个重要的属性我们想谈谈。第一个被称为完整性。
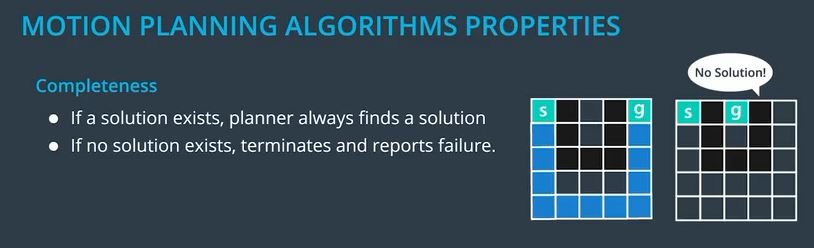
这意味着如果通过乘法问题存在解决方案,规划者会发现它。
如果解决方案不存在,计划者将终止并报告没有解决方案。
所以,请考虑以下两种情况。
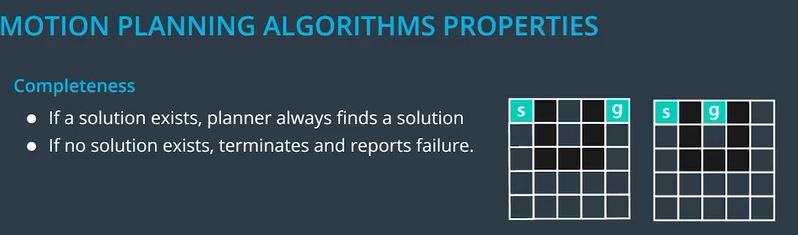
在第一种中,完整的算法可能正确地将其识别为解决方案。

而第二种,该算法会终止并告诉我们没有解决方案。
现在,可能有些事情困扰着你,关于第一个例子中确定的解决方案。
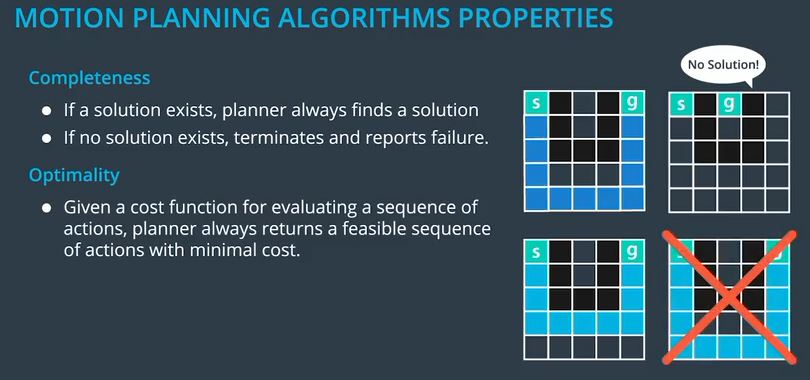
这给我们带来了第二个属性,最优性。
规划算法总是最优的,返回最小化一些成本函数的序列。因此,例如,如果我们将总行程距离用作成本函数,
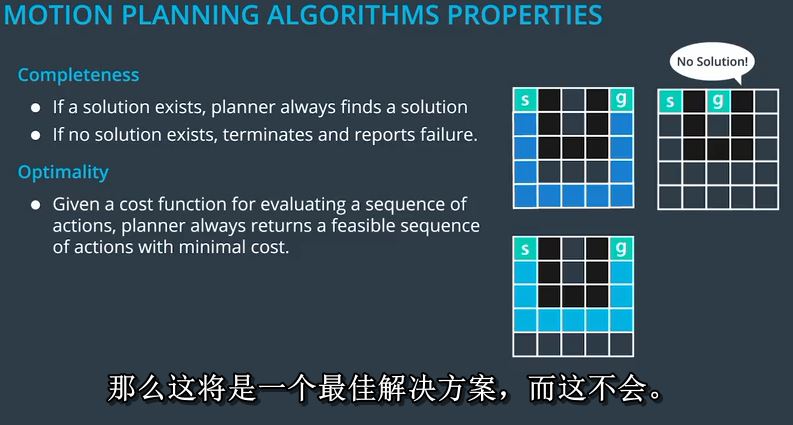
那么这将是一个最佳解决方案,而这不会是这样。
以上是关于第三期 轨迹生成——3.运动规划算法的属性的主要内容,如果未能解决你的问题,请参考以下文章