ORB SLAM2运行中出现(ORB-SLAM2: Current Frame:14370): GLib-GIO-CRITICAL...的n问题
Posted wongyi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ORB SLAM2运行中出现(ORB-SLAM2: Current Frame:14370): GLib-GIO-CRITICAL...的n问题相关的知识,希望对你有一定的参考价值。
在Ubuntu16.04上安装ORBSLAM2,参考文档:http://www.cnblogs.com/wongyi/p/8596084.html
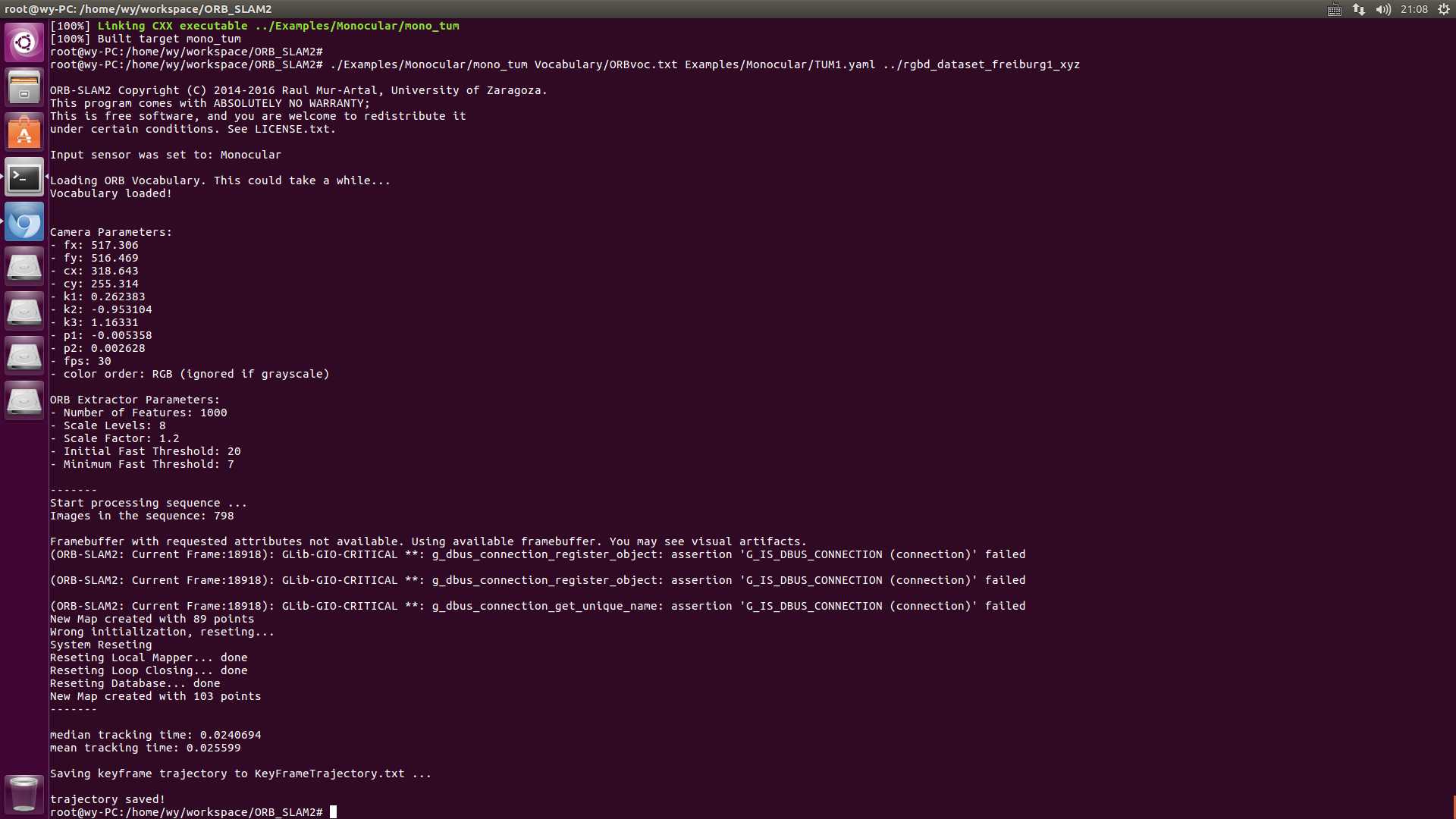
执行代码:
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml ../rgbd_dataset_freiburg1_xyz
然后它就正常执行了,但是不明白为什么中间输出的信息中含有大量的以下代码:(我是已经安装了OpenGL并且按照https://blog.csdn.net/zhangliang_571/article/details/25241911这篇文章介绍的方法测试成功了的。)
Framebuffer with requested attributes not available. Using available framebuffer. You may see visual artifacts. (ORB-SLAM2: Current Frame:14370): GLib-GIO-CRITICAL **: g_dbus_connection_register_object: assertion ‘G_IS_DBUS_CONNECTION (connection)‘ failed (ORB-SLAM2: Current Frame:14370): GLib-GIO-CRITICAL **: g_dbus_connection_register_object: assertion ‘G_IS_DBUS_CONNECTION (connection)‘ failed (ORB-SLAM2: Current Frame:14370): GLib-GIO-CRITICAL **: g_dbus_connection_get_unique_name: assertion ‘G_IS_DBUS_CONNECTION (connection)‘ failed
我想知道这是为什么呢?请教大家,先谢谢大家。
以上是关于ORB SLAM2运行中出现(ORB-SLAM2: Current Frame:14370): GLib-GIO-CRITICAL...的n问题的主要内容,如果未能解决你的问题,请参考以下文章