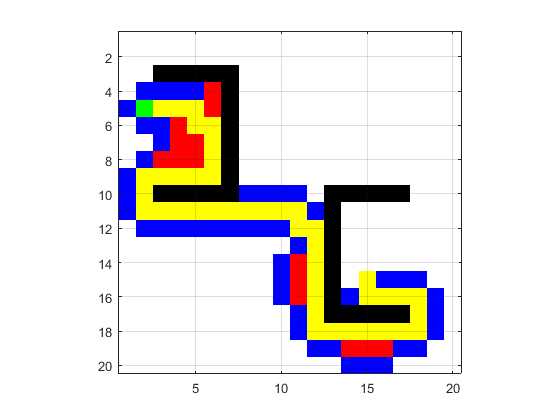
1 %创建具有障碍物的栅格地图 2 %矩阵中1代表黑色栅格 3 map = zeros(20); 4 map(3,3:7)=2; 5 map(3:10,7)=2; 6 map(10,3:7)=2; 7 map(17,13:17)=2; 8 map(10:17,13)=2; 9 map(10,13:17)=2; 10 map(5,2)=5; 11 map(15,15)=6; 12 % 白色,可行路径 13 % 黑色,障碍物 14 % 红色,visited 15 % 蓝色,on list 16 % green,start 17 % yellow,destination 18 % 对应于下个矩阵 19 map_color = [1 1 1; 20 0 0 0; 21 1 0 0; 22 0 0 1; 23 0 1 0; 24 1 1 0]; 25 %=========================== 26 colormap(map_color); % 创建颜色 27 image(map); % 赋予栅格颜色 28 colorbar; 29 set(gca,‘XTick‘,1:size(map,1),‘YTick‘,1:size(map,2)); % 设置坐标 30 axis image xy; % 沿每个坐标轴使用相同的数据单位,保持一致 31 grid on; 32 %======================== 33 nrows = 20; % 行数 34 ncols = 20; % 列数 35 start_node = sub2ind(size(map), 5, 2); % 起点索引,先对应列元素 36 dest_node = sub2ind(size(map), 15, 15); % 终点索引 37 %===================== 38 distanceFromStart = Inf(nrows,ncols); % 距离初始化 39 distanceFromStart(start_node) = 0; % 起点距离初始化 40 41 % disp(distance_FromStart); 42 43 % 计算h值,有八个拓展方向,选择欧式距离 44 [X, Y] = meshgrid (1:ncols, 1:nrows); 45 H = sqrt((Y - 15).^2 + (X - 15).^2); 46 47 f = Inf(nrows,ncols); 48 f(start_node) = H(start_node); 49 %disp(f(start_node)); 50 51 parent = zeros(nrows,ncols); 52 % Main Loop 53 while true 54 % Draw current map 55 map(start_node) = 5; 56 map(dest_node) = 6; 57 image(map); 58 grid on; 59 axis image; 60 drawnow; 61 %==================== 62 % Find the node with the minimum distance 63 [~, current] = min(f(:)); % f(:)列向量排列成一个列向量,找到最小值,~忽略输出参数,current位置是索引 64 [min_dist, ~] = min(distanceFromStart(:)); 65 %=================== 66 if ((current == dest_node) || isinf(min_dist)) 67 break; 68 69 end 70 71 map(current) = 3; 72 %============ 73 f(current) =Inf; 74 [i, j] = ind2sub(size(distanceFromStart), current); 75 neighbor = [i-1,j; 76 i+1,j; 77 i,j+1; 78 i,j-1] ; 79 outRangetest = (neighbor(:,1)<1) + (neighbor(:,1)>nrows) +(neighbor(:,2)<1) + (neighbor(:,2)>ncols ) ; 80 locate = find(outRangetest>0); 81 neighbor(locate,:)=[] ; 82 neighborIndex = sub2ind(size(map),neighbor(:,1),neighbor(:,2)) ; 83 for i=1:length(neighborIndex) 84 if (map(neighborIndex(i))~=2) && (map(neighborIndex(i))~=3 && map(neighborIndex(i))~= 5) 85 map(neighborIndex(i)) = 4; 86 if distanceFromStart(neighborIndex(i))> min_dist + 1 87 distanceFromStart(neighborIndex(i)) = min_dist+1; 88 parent(neighborIndex(i)) = current; 89 f(neighborIndex(i)) =H(neighborIndex(i)); 90 end 91 end 92 end 93 end 94 95 96 %% 97 if (isinf(distanceFromStart(dest_node))) 98 route = []; 99 else 100 %提取路线坐标 101 route = [dest_node]; 102 while (parent(route(1)) ~= 0) 103 route = [parent(route(1)), route]; 104 end 105 % 动态显示出路线 106 for k = 2:length(route) - 1 107 map(route(k)) = 7; 108 pause(0.1); 109 image( map); 110 grid on; 111 axis image; 112 end 113 end 114 115
有问题!!!