总线设备驱动模型
Posted coding__madman
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了总线设备驱动模型相关的知识,希望对你有一定的参考价值。
总线驱动设备模型:
1. 总线设备驱动模型概述
随着技术的不断进步,系统的拓扑结构也越来越复杂,对热插拔,跨平台移植性的要求也越来越高,2.4内核已经难以满足这些需求,为适应这宗形势的需求,从linux2.6内核开始提供了全新的设备模型
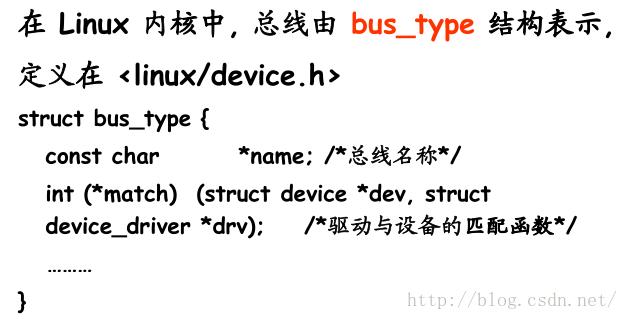
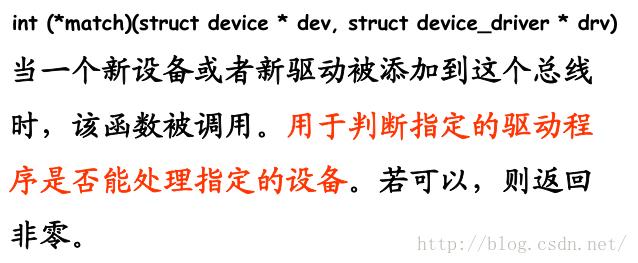
2. 总线
2.1 描述结构
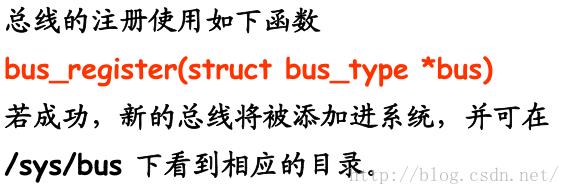
2.2 注册
2.3 注销
void bus_unregister(struct bus_type *bus)
代码例程:
bus.c
#include<linux/module.h>
#include<linux/init.h>
#include<linux/kernel.h>
#include<linux/device.h>
MODULE_LICENSE("GPL");
int my_match(struct device *dev, struct device_driver *drv)
{
return 0;
}
struct bus_type my_bus_type =
{
.name = "my_bus",
.match = my_match,
};
int my_bus_init(void)
{
int ret;
ret = bus_register(&my_bus_type);
return ret;
}
void my_bus_exit(void)
{
bus_unregister(&my_bus_type);
}
module_init(my_bus_init);
module_exit(my_bus_exit);
这是上面的总线驱动模块编译运行的效果图!
下面向上面的my_bus总线上挂载一个驱动!
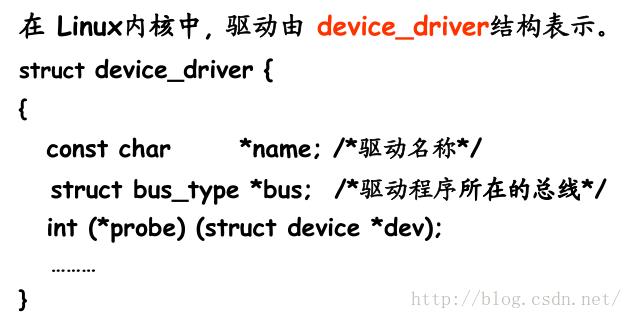
3. 驱动
3.1 描述结构
3.2 注册
int drvier_register(struct device *dev)
3.3 注销
void drever_unregister(struct device_driver *drv)
4. 设备
4.1 设备的描述
4.2 设备的注册
int device_register(struct device *dev)
4.3 设备的注销
void device_unregister(struct device *dev)
driver.c
#include<linux/module.h>
#include<linux/init.h>
#include<linux/device.h>
#include<linux/kernel.h>
MODULE_LICENSE("GPL");
extern struct bus_type my_bus_type;
int my_probe(struct device *dev)
{
printk(KERN_WARNING"driver found the device!!!\\n");
return 0;
}
struct device_driver my_driver =
{
.name = "my_dev",
.bus = &my_bus_type,
.probe = my_probe, //当找到这个设备时将调用这个函数
};
int my_device_init(void)
{
int ret;
ret = driver_register(&my_driver);//注册一个驱动
return 0;
}
void my_device_exit(void)
{
driver_unregister(&my_driver);
}
module_init(my_device_init);
module_exit(my_device_exit);
obj-m := bus.o device.o
KDIR := /home/kernel/linux-ok6410
all:
make -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-linux- ARCH=arm
clean:
rm -f *.ko *.o *.mod.o *.mod.c *.symvers *.bak *.order
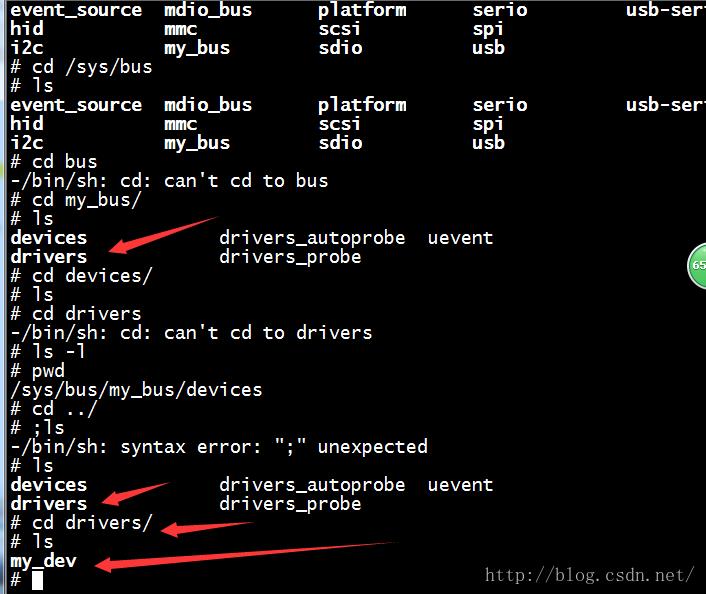
下面再在总线上挂载一个设备!
device.c
#include <linux/device.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
MODULE_LICENSE("GPL");
extern struct bus_type my_bus_type;
struct device my_dev =
{
.init_name = "my_dev",//和驱动名字一样
.bus = &my_bus_type,
};
int my_device_init(void)
{
int ret;
ret = device_register(&my_dev);
return ret;
}
void my_device_exit(void)
{
device_unregister(&my_dev);
}
module_init(my_device_init);
module_exit(my_device_exit);driver.c
#include<linux/module.h>
#include<linux/init.h>
#include<linux/device.h>
#include<linux/kernel.h>
MODULE_LICENSE("GPL");
extern struct bus_type my_bus_type;
int my_probe(struct device *dev)
{
printk(KERN_WARNING"driver found the device!!!\\n");
return 0;
}
struct device_driver my_driver =
{
.name = "my_dev",
.bus = &my_bus_type,
.probe = my_probe, //当找到这个设备时将调用这个函数
};
int my_device_init(void)
{
int ret;
ret = driver_register(&my_driver);//注册一个驱动
return 0;
}
void my_device_exit(void)
{
driver_unregister(&my_driver);
}
module_init(my_device_init);
module_exit(my_device_exit);
#include<linux/module.h>
#include<linux/init.h>
#include<linux/kernel.h>
#include<linux/device.h>
MODULE_LICENSE("GPL");
int my_match(struct device *dev, struct device_driver *drv)
{
return !strncmp(dev->kobj.name,drv->name,strlen(drv->name));
}
struct bus_type my_bus_type =
{
.name = "my_bus",
.match = my_match,
};
EXPORT_SYMBOL(my_bus_type);//输出符号 另一device.c要用到
int my_bus_init(void)
{
int ret;
ret = bus_register(&my_bus_type);
return ret;
}
void my_bus_exit(void)
{
bus_unregister(&my_bus_type);
}
module_init(my_bus_init);
module_exit(my_bus_exit);Makefile
obj-m := bus.o driver.o device.o
KDIR := /home/kernel/linux-ok6410
all:
make -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-linux- ARCH=arm
clean:
rm -f *.ko *.o *.mod.o *.mod.c *.symvers *.bak *.order
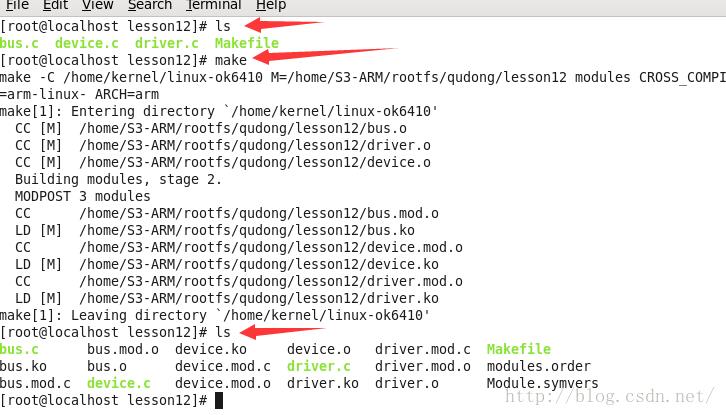
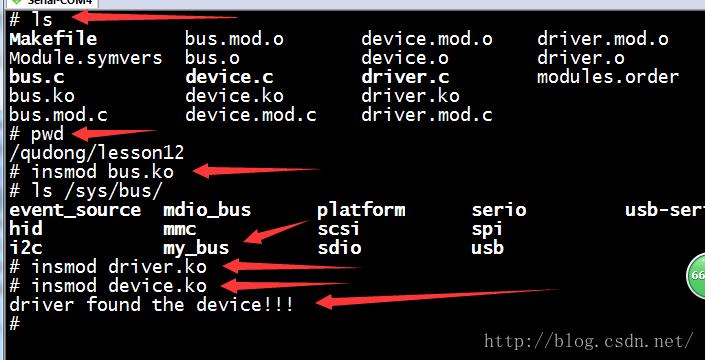
运行效果图:
平台总线驱动设计:
1. 平台总线概述
平台总线(Platform bus)是linux2.6内核加入的一种虚拟总线,其优势在于采用了总线的模型对设备与驱动进行了管理,这样提高了程序的可移植性。
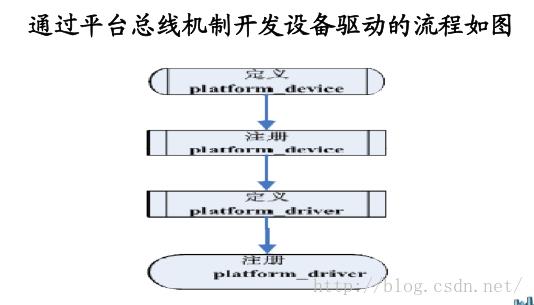
2. 平台设备

注册平台设备,使用函数:
int platform_device_register(struct platform_device *pdev)

3. 平台驱动
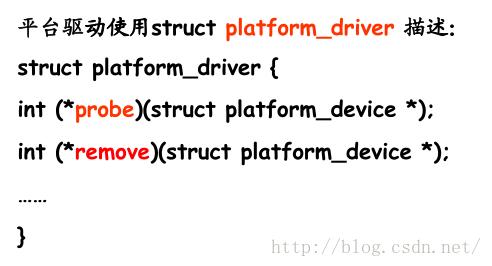
平台驱动注册使用函数:
int platform_driver_register(struct platform_driver *)
结合上面的基础知识,将案件驱动修改为平台驱动模式!
1. 平台设备注册
2. 平台按键驱动设计
key_dev.c
#include<linux/init.h>
#include<linux/module.h>
#include<linux/platform_device.h>
#include<linux/interrupt.h>
MODULE_LICENSE("GPL");
#define GPNCON 0x7F008830
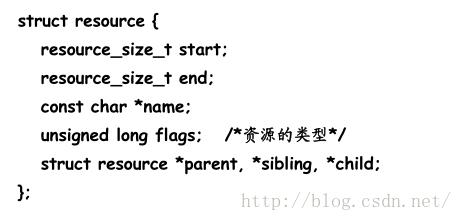
static struct resource key_resource[] = { //定义按键资源
[0] = {
.start = GPNCON,
.end = GPNCON + 8,
.flags = IORESOURCE_MEM,//内存地址资源
},
[1] = {
.start = S3C_EINT(0),//按键中断资源
.end = S3C_EINT(5),
.flags = IORESOURCE_IRQ,//内存地址资源
},
};
struct platform_device key_device =
{
.name = "my_key",
.id = 0,
.num_resources = ARRAY_SIZE(key_resource),
.resource = key_resource,
};
int keydri_init(void)
{
platform_device_register(&key_device);
return 0;
}
void keydri_exit(void)
{
platform_device_unregister(&key_device);
}
module_init(keydri_init);
module_exit(keydri_exit);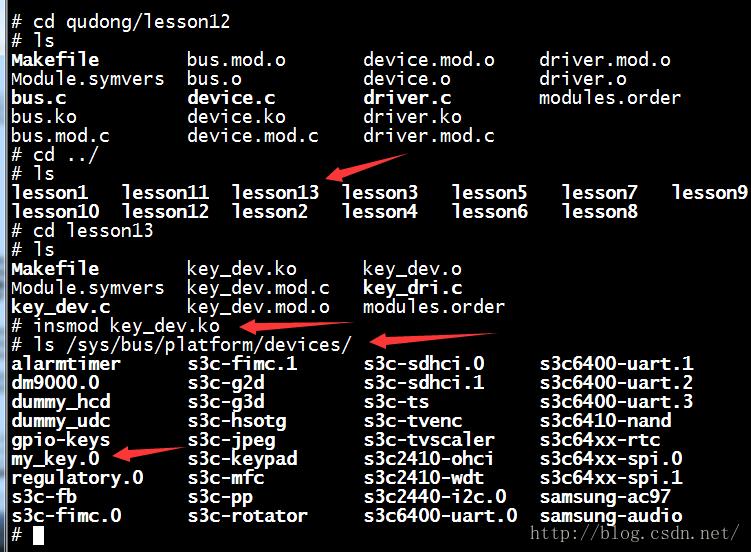
key_dri.c
#include <linux/module.h>
#include <linux/init.h>
#include <linux/miscdevice.h> /* for struct miscdevice*/
#include <linux/interrupt.h>
#include <linux/fs.h> /* for iormap */
#include <linux/io.h>
#include <linux/slab.h> /* for kmalloc */
#include<linux/uaccess.h> /* for copy_to_usr */
#include <linux/platform_device.h>
//#define GPNCON 0x7F008830
//#define GPNDAT 0x7F008834
MODULE_LICENSE("GPL");
unsigned int *key_base;
struct work_struct *work1;//定义一项工作
struct timer_list key_timer; //定义一个定时器key_timer
unsigned int key_num;
struct resource *res_mem;
struct resource *res_irq;
int size;
void work1_func(struct work_struct *work)
{
//启动定时器 jiffies是全局变量,用来表示当前系统时间 1S=1000个滴答数
mod_timer(&key_timer,jiffies + HZ/10); //设置100ms超时 1HZ=1S
}
void key_timer_func(unsigned long data)
{
unsigned int key_val;
key_val = readw(key_base + 1)&0x01; //只读取最后一位
if(key_val == 0)
{
printk(KERN_WARNING"OK6410 key1 down!\\n");
key_num = 0;
}
key_val = readw(key_base + 1)&0x20; //只读取最后一位
if(key_val == 0)
{
printk(KERN_WARNING"OK6410 key6 down!\\n");
key_num = 6;
}
}
irqreturn_t key_int(int irq, void *dev_id)
{
//1. 检测是否发生了按键中断 这里可以暂时不做,因为这里没有使用共享中断
//2. 清除已经发生的按键中断 这个是指硬件内部处理,按键CPU内部不需要做处理
//3. 提交下半部
schedule_work(work1);
//return 0;
return IRQ_HANDLED;
}
void key_hw_init(void) //按键硬件初始化部分
{
//unsigned int *gpio_config;
unsigned short data;
//gpio_config = ioremap(GPNCON, 4);//将物理地址转化为虚拟地址
data = readw(key_base);
data &= ~0b110000000011; //先清零
data |= 0b100000000010; //后两位设置成0b10
writew(data, key_base);
//gpio_data = ioremap(GPNDAT, 4);//将物理地址转化为虚拟地址
printk(KERN_WARNING"init ...!\\n");
}
int key_open(struct inode *node, struct file *filp)
{
printk(KERN_WARNING"open ...!\\n");
return 0;
}
ssize_t key_read(struct file *filp, char __user *buf, size_t size, loff_t *pos)
{
//将key_value值返回给用户空间
printk(KERN_WARNING"in kernel :key num is %d\\n",key_num);
copy_to_user(buf, &key_num, 4); //buf为用户空间传过来的地址
return 4;
}
struct file_operations key_fops =
{
.open = key_open,
.read = key_read,
};
struct miscdevice key_miscdev = //定义一个misdevice结构
{
.minor = 200,
.name = "6410key",
.fops = &key_fops,//这里key_fops是一个struct file_operations结构
};
static int __devinit key_probe(struct platform_device *pdev)
{
misc_register(&key_miscdev);//注册一个混杂设备驱动设备
res_irq = platform_get_resource(pdev, IORESOURCE_IRQ, 0); //取出中断资源
request_irq(res_irq->start,key_int,IRQF_TRIGGER_FALLING,"my_key",(void *)1);
request_irq(res_irq->end,key_int,IRQF_TRIGGER_FALLING,"my_key",(void *)6);
res_mem = platform_get_resource(pdev, IORESOURCE_MEM, 0);//取出地址资源
size = res_mem->end - res_mem->start + 1;
key_base = ioremap(res_mem->start,size);
key_hw_init();
work1 = kmalloc(sizeof(struct work_struct),GFP_KERNEL);
INIT_WORK(work1 , work1_func );
//初始化定时器
init_timer(&key_timer);
key_timer.function = key_timer_func; //将定义的函数赋值给函数指针
//注册定时器
add_timer(&key_timer);
return 0;
}
static int key_remove(struct platform_device *device)
{
free_irq(S3C_EINT(0), 0);//注销中断 这里irqnumber参数暂时用一个变量来表示(中断号)
free_irq(S3C_EINT(5), 0);//注销中断 这里irqnumber参数暂时用一个变量来表示(中断号)
misc_deregister(&key_miscdev);//注销一个混杂设备驱动
return 0;
}
struct platform_driver key_driver =
{
.driver = {
.name = "my_key",
.owner = THIS_MODULE,
},
.probe = key_probe,
.remove = key_remove,
};
static int key_init(void)
{
return platform_driver_register(&key_driver);
}
static void key_exit(void)
{
platform_driver_register(&key_driver);//卸载平台驱动
printk(KERN_WARNING"key up!");
}
module_init(key_init);
module_exit(key_exit);
MODULE_LICENSE("GPL");
MODULE_DESCRIPTION("key driver");
obj-m := key_dev.o key_dri.o
KDIR := /home/kernel/linux-ok6410
all:
make -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-linux- ARCH=arm
clean:
rm -f *.ko *.o *.mod.o *.mod.c *.symvers *.bak *.order
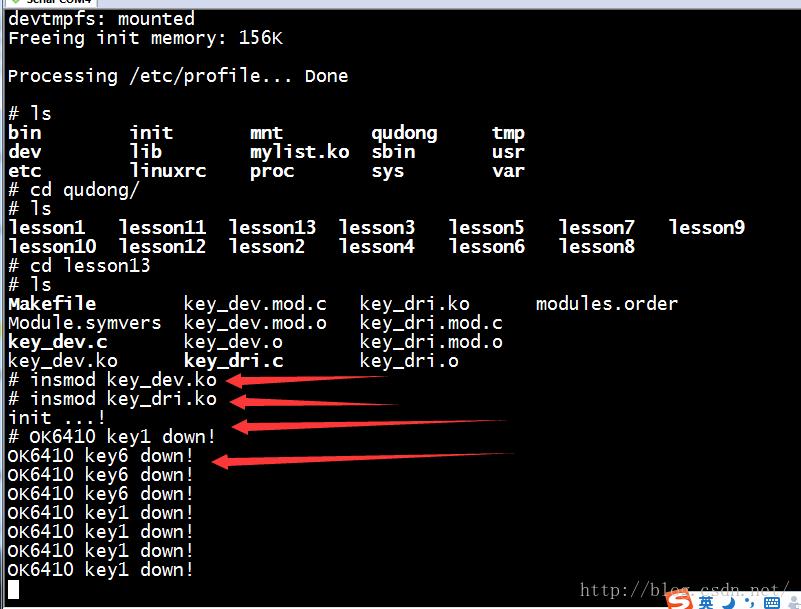
按下按键1或者按下按键6 可以看到驱动程序打印出如下信息! 这里或者创建设备文件,然后用前面博客里面的应用程序来测试也是一样的!
以上是关于总线设备驱动模型的主要内容,如果未能解决你的问题,请参考以下文章