Opencv中的WMesh
Posted 凤凰_1
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Opencv中的WMesh相关的知识,希望对你有一定的参考价值。
费了半天劲,终于把这个WMesh类搞懂了,可惜效果不佳,比Matlab中的mesh差多了。
使用WMesh前,需要有一个Mesh对象,Mesh是三维数据点的基本几何信息、颜色信息、索引信息等集成的对象。Mesh对象无法直接在Viz3d中显示,需要转换为WMesh对象,然后才可以显示。
首先了解Mesh类:
我们先看看Mesh的定义,在Mesh中有四个Mat型的成员变量,分别是cloud、colors和normals。
望名知意,cloud表示点云,它实际上是点云中每个点的坐标组成的二维矩阵,它的通道数为3,所以cloud的数据类型为:CV_32FC3,cloud的三个通道[0]、[1]、[2]分别对应坐标的x、y、z。对cloud还有一个特殊要求,那就是一行、N列,也就是一个一位矢量。需要预先把每个点坐标依次赋值给cloud的一些列元素,比如点P(x,y,z),赋值给cloud的第0行、j列元素:cloud.ptr<Vec3f>(0)[j][0]=x; cloud.ptr<Vec3f>(0)[j][1]=y; cloud.ptr<Vec3f>(0)[j][2]=z。
在Mesh中的第二个成员colors也是一个一维矩阵,1行、N列,与cloud的尺度一致。colors通常是3通道或四通道,但绝不以是2通道。三通道时,分别对应红、绿、蓝三原色。colors的每个元素与cloud中的元素一一对应,分别给cloud中对应元素赋予颜色。还有一点需要注意,colors的每个通道上的数据类型必须是CV_8U,因此colors的数据类型通常为CV_8UC3。
第三个公有成员是normals,它与colors类似,具体内容还没有研究。
第四个共有成员是polygons,它也是一个一维行矢量,但是列数要比cloud多一列,在polygons的第一个
还有一个公有静态成员函数load,大家自己研究吧!
class CV_EXPORTS Mesh { public: Mat cloud, colors, normals; //! Raw integer list of the form: (n,id1,id2,...,idn, n,id1,id2,...,idn, ...) //! where n is the number of points in the poligon, and id is a zero-offset index into an associated cloud. Mat polygons; //! Loads mesh from a given ply file static Mesh load(const String& file); };
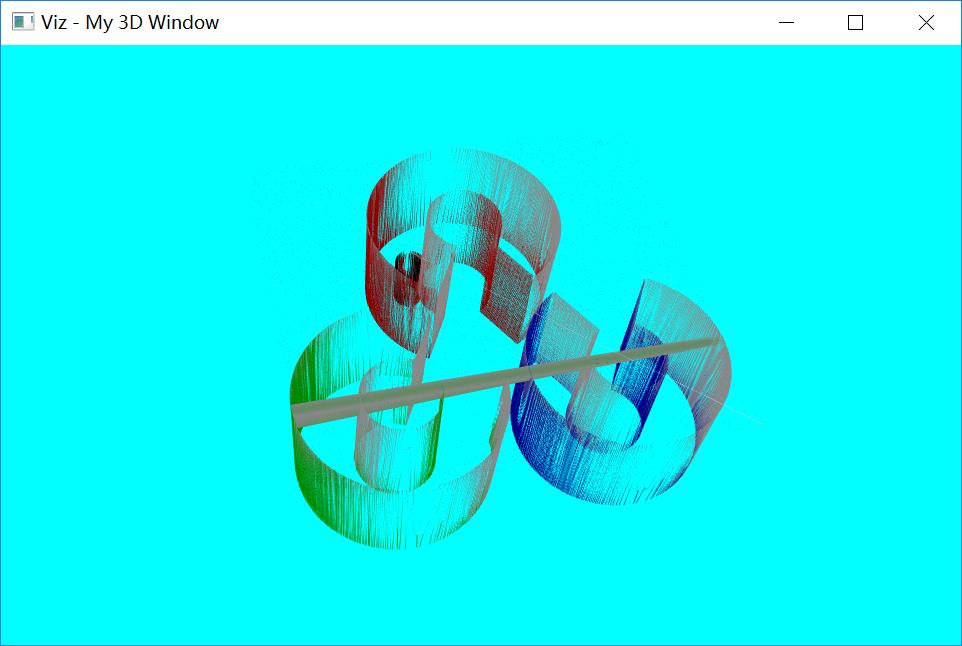
接下来,我们以一个实例来说明Mesh的用法。在本示例中,我读取了一幅图像,将图像的灰度值作为z值,这样就可以以三维的形式观察二维图像数据:
#include <opencv2/viz/vizcore.hpp> #include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace std; //#include "myfunction.h" int main() { Mat img=imread("D:/CodeWork/MyImage/opencv_logo.png"); Mat gray; img.convertTo(gray,CV_32FC1); int rows=img.rows,cols=img.cols; //为了赋值方便,这里我用了与img同行、同列的矩阵 Mat cloud(rows,cols,CV_32FC3); int cx=cols/2,cy=rows/2; //为cloud矩阵赋值 for(int i=0;i<rows;i++) { float y=i-cy; for(int j=0;j<cols;j++) { float x=j-cx; cloud.ptr<Vec3f>(i)[j][0]=x; cloud.ptr<Vec3f>(i)[j][1]=-y; cloud.ptr<Vec3f>(i)[j][2]=(img.ptr<Vec3b>(i)[j][0] +img.ptr<Vec3b>(i)[j][1] +img.ptr<Vec3b>(i)[j][2])/3; } } ///创建polygons矩阵,并为其赋值,它的第0个元素是三维点的个数 /// 剩下的元素值分别为1、2、3......、N。此次的N表示总的三维点数 Mat polygon(1,cols*rows+1,CV_32SC1,Scalar::all(0)); polygon.ptr<int>(0)[0]=rows*cols; for(int i=1;i<=polygon.cols;i++) polygon.ptr<int>(0)[i]=i; ///下面是把二维的cloud转化为一维的cloud Mat cloud1d=cloud.reshape(0,cloud.rows*cloud.cols); cloud1d=cloud1d.t(); ///创建并赋值Mesh对象 viz::Mesh mesh; mesh.cloud=cloud1d; mesh.polygons=polygon; ///创建颜色矩阵 Mat color; color=img.reshape(0,rows*cols); color=color.t(); mesh.colors=color; ///mesh本身无法在三维窗口中显示,需要经过WMesh处理,得到WMesh对象wmesh viz::WMesh wmesh(mesh); ///显示wmesh imshow("original image",img); viz::Viz3d my3DWin("My 3D Window"); my3DWin.setBackgroundColor(viz::Color::cyan()); my3DWin.showWidget("wmesh",wmesh); my3DWin.spin(); return 0; }
以上是关于Opencv中的WMesh的主要内容,如果未能解决你的问题,请参考以下文章