主板图解
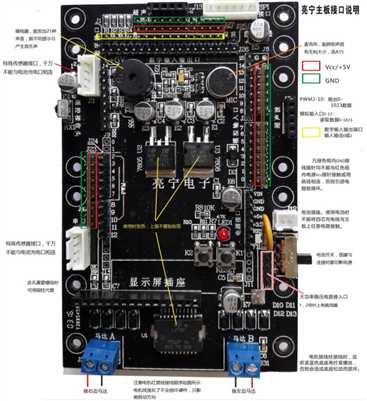
亮宁主板,接口相当丰富,对现行通用的各种传感器都可以实现直接对接,已具有较大的二次开发的实用价值。
GND,电源负极与信号公共端。
Vcc ,各种传感器或执行设备的电源。本机统一为+5V。
模拟输入口,读取0~1023之间数值。适应模拟传感器输入。
PWM为数字转模拟输出0~1023之间的数。
数字口:GPIO端口,即做二进制数输入,又做数字口输出。
常用的外接设备

图片设备依次是:火焰传感器 八位数字开关板 双色LED板 模拟输入板
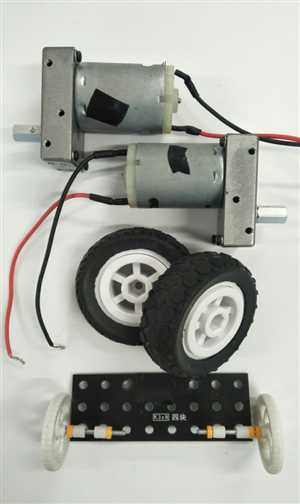
图片设备依次是:马达 轮胎 辅助轮胎

图片设备依次是:LCD液晶显示屏 超声波传感器 遥控器

图片设备依次是:360°伺服电机、 182°伺服电机、 小马达、 风扇


各类工具和充电器电池
熟悉开发环境
离开程序的机器人就只是一个模型。“工欲善其事,必先利其器,在学习亮宁机器人的编程之前,先让我们了熟悉一下编程环境。首先我们安装好Arduino,双击打开,下图就是我们的编程环境。

制作过程
安装主板驱动:打开“主板驱动”文件夹,点击“SETUP”,点击“安装”,便可安装好亮宁机器人的主板驱动。安装好主板驱动后,可以在“设备管理器”(右击“计算机”->“设备”->“设备管理->“端口”)。查看到主板的COM口编号。

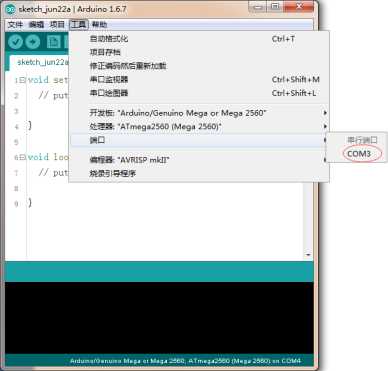
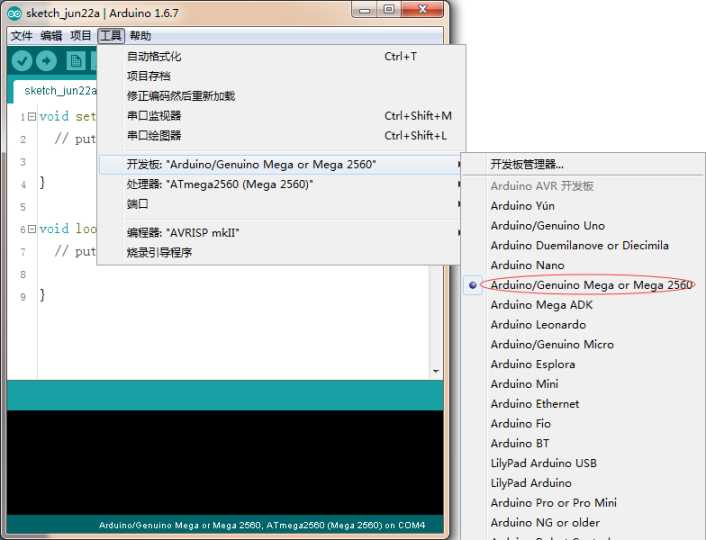
然后在Arduino工具菜单下的开发板中,我们选择Arduino/Genuino Mega or Mega 2560,现在我们的准备工作就大功告成了!
下面我们上个程序试试,首先在把Arduino编辑区的内容全部删除,输入下面的代码。
代码:0-1 警报程序
#include <LNDZ.h> void init() { B_start(); } void repeat() { beep(300);//鸣叫300ms delay(200);//停止200ms }
上传程序然后拔掉数据线,主板连接电源,打开主板电源开关,按下K2开始按钮(左边的小按钮),如果小车发出间隙且连续的警报声,那么就证明你实验成功。
从下一节开始我们会进行系统的学习,大家做好准备了吗?