Pixhawk之姿态控制篇_源码算法分析(超级有料)
Posted _Summer__
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Pixhawk之姿态控制篇_源码算法分析(超级有料)相关的知识,希望对你有一定的参考价值。
一、开篇
姿态控制篇终于来了、来了、来了~~~
心情爽不爽?愉悦不愉悦?开心不开心?
喜欢的话就请我吃顿饭吧,哈哈。
其实这篇blog一周前就应该写的,可惜被上一篇blog霸占了。但是也不算晚,整理了很多算法基础知识,使得本篇blog更充实。一人之力总是有限的,难免有不足之处,大家见谅,有写的不好的地方劳烦指正。看到标题了吧,属于连载篇,所以后续还会有相关问题的补充的。
三、实验平台
Software Version:PX4Firmware
Hardware Version:pixhawk
IDE:eclipse Juno (Windows)
四、基础知识
1、写在前面
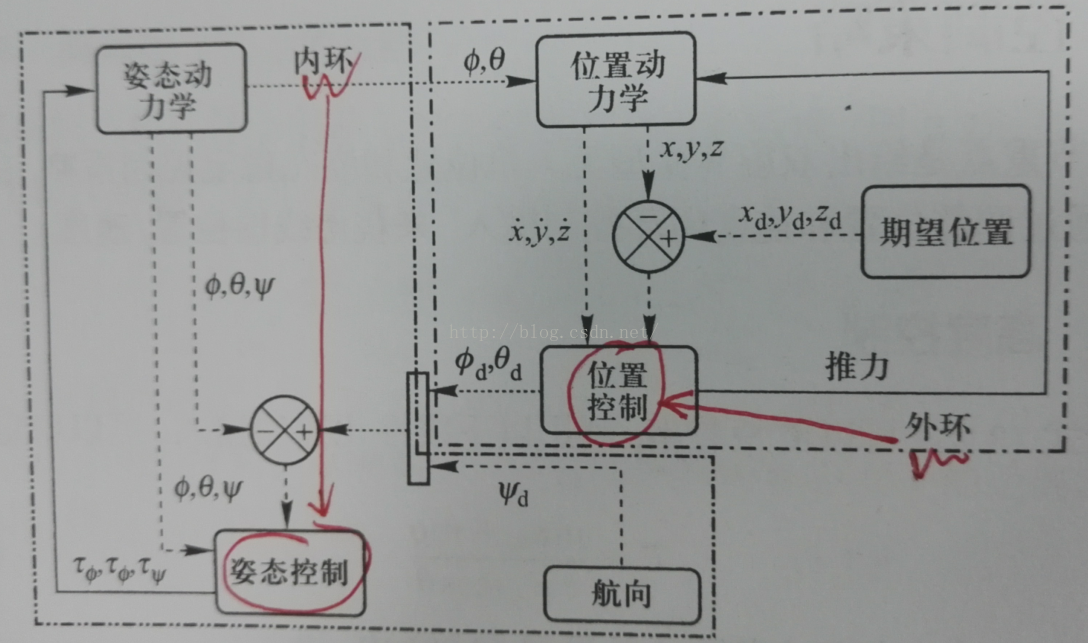
无人机控制部分主要分为两个部分,姿态控制部分和位置控制部分;位置控制可用远程遥控控制,而姿态控制一般由无人机系统自动完成。姿态控制是非常重要的,因为无人机的位置变化都是由姿态变化引起的。
下图阐释了PX4源码中的两个环路控制,分为姿态控制和位置控制。
补充:关于Pixhawk原生固件中姿态(估计/控制)和位置(估计/控制)源码的应用问题
PX4Fireware原生固件中的modules中姿态估计有多种:Attitude_estimator_ekf、Attitude_estimator_q、ekf_att_pos_estimator。
位置估计有:ekf_att_pos_estimator、local_position_estimator、position_estimator_inav
姿态控制有:fw_att_control、mc_att_control、mc_att_control_multiplatform、vtol_att_control
位置控制有:fw_pos_control_l1、fw_pos_control_l1、mc_pos_control_multiplatform
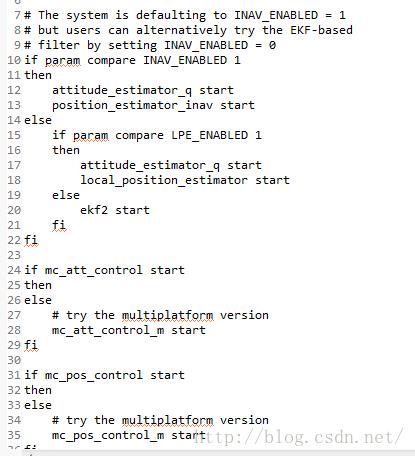
四旋翼用到以上哪些估计和控制算法呢?这部分在启动代码rc.mc_app里面有详细的说明。
以上是关于Pixhawk之姿态控制篇_源码算法分析(超级有料)的主要内容,如果未能解决你的问题,请参考以下文章