2年前在学习图像算法的时候看到一个文档倾斜矫正的算法。
也就是说能将一些文档图像进行旋转矫正,
当然这个算法一般用于一些文档扫描软件做后处理
或者用于ocr 文字识别做前处理。
相关的关键词: 抗倾斜 反倾斜 Deskew 等等。
最简单算法实现思路,采用 霍夫变换(Hough Transform)进行直线检测,
当然也可以用霍夫变换检测圆。
在倾斜矫正算法中,自然就是检测直线。
通过对检测出来的直线进行角度判断,
一般取 认可度最高的几条直线进行计算,
最后求取均衡后的角度值。
进行图像角度的旋转即可。
大概算法步骤如下:
1.转换为灰度图
2.判断是否为文本图片,如果不是进行 进行 反相操作
3.检测直线,进行角度判断
4.通过角度进行图像旋转
这么一个基本思路,当然想要检测得更加精准,
可以做一些文本区域判断,图像修复增强之类的前处理操作。
最近有点强迫症犯了,开始回归本源,强迫自己用c语言来实现,
fastsin以及fastcos 来自 arm公司的开源项目。
霍夫变换相关算法原理,请移步 百度 google 维基百科。
或直接看代码实现,可了悟于心。
有事没事,多看看业内大公司的开源项目,
萝卜白菜都有,重点是学习其思路。
嗯,有些网友可能会说,opencv一两行代码就可以做到了。
对的,一些sdk,api,开源框架一两句代码是做到了,
知道,用到,与真正做到,这是两条路。
我只想说一句,愿世界和平。
附完整代码:
//如果是Windows的话,调用系统API ShellExecuteA打开图片 #if defined(_MSC_VER) #define _CRT_SECURE_NO_WARNINGS #include <windows.h> #define USE_SHELL_OPEN #endif #define STB_IMAGE_STATIC #define STB_IMAGE_IMPLEMENTATION #include "stb_image.h" //ref:https://github.com/nothings/stb/blob/master/stb_image.h #define TJE_IMPLEMENTATION #include "tiny_jpeg.h" //ref:https://github.com/serge-rgb/TinyJPEG/blob/master/tiny_jpeg.h #include <math.h> #include <io.h> #include <math.h> #include <stdlib.h> #include <stdbool.h> //计时 #include <stdint.h> #if defined(__APPLE__) # include <mach/mach_time.h> #elif defined(_WIN32) # define WIN32_LEAN_AND_MEAN # include <windows.h> #else // __linux # include <time.h> # ifndef CLOCK_MONOTONIC //_RAW # define CLOCK_MONOTONIC CLOCK_REALTIME # endif #endif static uint64_t nanotimer() { static int ever = 0; #if defined(__APPLE__) static mach_timebase_info_data_t frequency; if (!ever) { if (mach_timebase_info(&frequency) != KERN_SUCCESS) { return 0; } ever = 1; } return; #elif defined(_WIN32) static LARGE_INTEGER frequency; if (!ever) { QueryPerformanceFrequency(&frequency); ever = 1; } LARGE_INTEGER t; QueryPerformanceCounter(&t); return (t.QuadPart * (uint64_t)1e9) / frequency.QuadPart; #else // __linux struct timespec t; if (!ever) { if (clock_gettime(CLOCK_MONOTONIC, &spec) != 0) { return 0; } ever = 1; } clock_gettime(CLOCK_MONOTONIC, &spec); return (t.tv_sec * (uint64_t)1e9) + t.tv_nsec; #endif } static double now() { static uint64_t epoch = 0; if (!epoch) { epoch = nanotimer(); } return (nanotimer() - epoch) / 1e9; }; double calcElapsed(double start, double end) { double took = -start; return took + end; } //存储当前传入文件位置的变量 char saveFile[1024]; //加载图片 unsigned char * loadImage(const char *filename, int *Width, int *Height, int *Channels) { return stbi_load(filename, Width, Height, Channels, 0); } //保存图片 void saveImage(const char *filename, int Width, int Height, int Channels, unsigned char *Output) { memcpy(saveFile + strlen(saveFile), filename, strlen(filename)); *(saveFile + strlen(saveFile) + 1) = 0; //保存为jpg if (!tje_encode_to_file(saveFile, Width, Height, Channels, true, Output)) { fprintf(stderr, "写入 JPEG 文件失败.\\n"); return; } #ifdef USE_SHELL_OPEN ShellExecuteA(NULL, "open", saveFile, NULL, NULL, SW_SHOW); #else //其他平台暂不实现 #endif } #ifndef ClampToByte #define ClampToByte( v ) ( ((unsigned)(int)(v)) <(255) ? (v) : ((int)(v) < 0) ? (0) : (255)) #endif #define M_PI 3.14159265358979323846f typedef struct cpu_HoughLine { float Theta; int Radius; int Intensity; float RelativeIntensity; } cpu_HoughLine; typedef struct cpu_rect { int x; int y; int Width; int Height; } cpu_rect; #ifndef clamp #define clamp(value,min,max) ((value) > (max )? (max ): (value) < (min) ? (min) : (value)) #endif #define FAST_MATH_TABLE_SIZE 512 const float sinTable_f32[FAST_MATH_TABLE_SIZE + 1] = { 0.00000000f, 0.01227154f, 0.02454123f, 0.03680722f, 0.04906767f, 0.06132074f, 0.07356456f, 0.08579731f, 0.09801714f, 0.11022221f, 0.12241068f, 0.13458071f, 0.14673047f, 0.15885814f, 0.17096189f, 0.18303989f, 0.19509032f, 0.20711138f, 0.21910124f, 0.23105811f, 0.24298018f, 0.25486566f, 0.26671276f, 0.27851969f, 0.29028468f, 0.30200595f, 0.31368174f, 0.32531029f, 0.33688985f, 0.34841868f, 0.35989504f, 0.37131719f, 0.38268343f, 0.39399204f, 0.40524131f, 0.41642956f, 0.42755509f, 0.43861624f, 0.44961133f, 0.46053871f, 0.47139674f, 0.48218377f, 0.49289819f, 0.50353838f, 0.51410274f, 0.52458968f, 0.53499762f, 0.54532499f, 0.55557023f, 0.56573181f, 0.57580819f, 0.58579786f, 0.59569930f, 0.60551104f, 0.61523159f, 0.62485949f, 0.63439328f, 0.64383154f, 0.65317284f, 0.66241578f, 0.67155895f, 0.68060100f, 0.68954054f, 0.69837625f, 0.70710678f, 0.71573083f, 0.72424708f, 0.73265427f, 0.74095113f, 0.74913639f, 0.75720885f, 0.76516727f, 0.77301045f, 0.78073723f, 0.78834643f, 0.79583690f, 0.80320753f, 0.81045720f, 0.81758481f, 0.82458930f, 0.83146961f, 0.83822471f, 0.84485357f, 0.85135519f, 0.85772861f, 0.86397286f, 0.87008699f, 0.87607009f, 0.88192126f, 0.88763962f, 0.89322430f, 0.89867447f, 0.90398929f, 0.90916798f, 0.91420976f, 0.91911385f, 0.92387953f, 0.92850608f, 0.93299280f, 0.93733901f, 0.94154407f, 0.94560733f, 0.94952818f, 0.95330604f, 0.95694034f, 0.96043052f, 0.96377607f, 0.96697647f, 0.97003125f, 0.97293995f, 0.97570213f, 0.97831737f, 0.98078528f, 0.98310549f, 0.98527764f, 0.98730142f, 0.98917651f, 0.99090264f, 0.99247953f, 0.99390697f, 0.99518473f, 0.99631261f, 0.99729046f, 0.99811811f, 0.99879546f, 0.99932238f, 0.99969882f, 0.99992470f, 1.00000000f, 0.99992470f, 0.99969882f, 0.99932238f, 0.99879546f, 0.99811811f, 0.99729046f, 0.99631261f, 0.99518473f, 0.99390697f, 0.99247953f, 0.99090264f, 0.98917651f, 0.98730142f, 0.98527764f, 0.98310549f, 0.98078528f, 0.97831737f, 0.97570213f, 0.97293995f, 0.97003125f, 0.96697647f, 0.96377607f, 0.96043052f, 0.95694034f, 0.95330604f, 0.94952818f, 0.94560733f, 0.94154407f, 0.93733901f, 0.93299280f, 0.92850608f, 0.92387953f, 0.91911385f, 0.91420976f, 0.90916798f, 0.90398929f, 0.89867447f, 0.89322430f, 0.88763962f, 0.88192126f, 0.87607009f, 0.87008699f, 0.86397286f, 0.85772861f, 0.85135519f, 0.84485357f, 0.83822471f, 0.83146961f, 0.82458930f, 0.81758481f, 0.81045720f, 0.80320753f, 0.79583690f, 0.78834643f, 0.78073723f, 0.77301045f, 0.76516727f, 0.75720885f, 0.74913639f, 0.74095113f, 0.73265427f, 0.72424708f, 0.71573083f, 0.70710678f, 0.69837625f, 0.68954054f, 0.68060100f, 0.67155895f, 0.66241578f, 0.65317284f, 0.64383154f, 0.63439328f, 0.62485949f, 0.61523159f, 0.60551104f, 0.59569930f, 0.58579786f, 0.57580819f, 0.56573181f, 0.55557023f, 0.54532499f, 0.53499762f, 0.52458968f, 0.51410274f, 0.50353838f, 0.49289819f, 0.48218377f, 0.47139674f, 0.46053871f, 0.44961133f, 0.43861624f, 0.42755509f, 0.41642956f, 0.40524131f, 0.39399204f, 0.38268343f, 0.37131719f, 0.35989504f, 0.34841868f, 0.33688985f, 0.32531029f, 0.31368174f, 0.30200595f, 0.29028468f, 0.27851969f, 0.26671276f, 0.25486566f, 0.24298018f, 0.23105811f, 0.21910124f, 0.20711138f, 0.19509032f, 0.18303989f, 0.17096189f, 0.15885814f, 0.14673047f, 0.13458071f, 0.12241068f, 0.11022221f, 0.09801714f, 0.08579731f, 0.07356456f, 0.06132074f, 0.04906767f, 0.03680722f, 0.02454123f, 0.01227154f, 0.00000000f, -0.01227154f, -0.02454123f, -0.03680722f, -0.04906767f, -0.06132074f, -0.07356456f, -0.08579731f, -0.09801714f, -0.11022221f, -0.12241068f, -0.13458071f, -0.14673047f, -0.15885814f, -0.17096189f, -0.18303989f, -0.19509032f, -0.20711138f, -0.21910124f, -0.23105811f, -0.24298018f, -0.25486566f, -0.26671276f, -0.27851969f, -0.29028468f, -0.30200595f, -0.31368174f, -0.32531029f, -0.33688985f, -0.34841868f, -0.35989504f, -0.37131719f, -0.38268343f, -0.39399204f, -0.40524131f, -0.41642956f, -0.42755509f, -0.43861624f, -0.44961133f, -0.46053871f, -0.47139674f, -0.48218377f, -0.49289819f, -0.50353838f, -0.51410274f, -0.52458968f, -0.53499762f, -0.54532499f, -0.55557023f, -0.56573181f, -0.57580819f, -0.58579786f, -0.59569930f, -0.60551104f, -0.61523159f, -0.62485949f, -0.63439328f, -0.64383154f, -0.65317284f, -0.66241578f, -0.67155895f, -0.68060100f, -0.68954054f, -0.69837625f, -0.70710678f, -0.71573083f, -0.72424708f, -0.73265427f, -0.74095113f, -0.74913639f, -0.75720885f, -0.76516727f, -0.77301045f, -0.78073723f, -0.78834643f, -0.79583690f, -0.80320753f, -0.81045720f, -0.81758481f, -0.82458930f, -0.83146961f, -0.83822471f, -0.84485357f, -0.85135519f, -0.85772861f, -0.86397286f, -0.87008699f, -0.87607009f, -0.88192126f, -0.88763962f, -0.89322430f, -0.89867447f, -0.90398929f, -0.90916798f, -0.91420976f, -0.91911385f, -0.92387953f, -0.92850608f, -0.93299280f, -0.93733901f, -0.94154407f, -0.94560733f, -0.94952818f, -0.95330604f, -0.95694034f, -0.96043052f, -0.96377607f, -0.96697647f, -0.97003125f, -0.97293995f, -0.97570213f, -0.97831737f, -0.98078528f, -0.98310549f, -0.98527764f, -0.98730142f, -0.98917651f, -0.99090264f, -0.99247953f, -0.99390697f, -0.99518473f, -0.99631261f, -0.99729046f, -0.99811811f, -0.99879546f, -0.99932238f, -0.99969882f, -0.99992470f, -1.00000000f, -0.99992470f, -0.99969882f, -0.99932238f, -0.99879546f, -0.99811811f, -0.99729046f, -0.99631261f, -0.99518473f, -0.99390697f, -0.99247953f, -0.99090264f, -0.98917651f, -0.98730142f, -0.98527764f, -0.98310549f, -0.98078528f, -0.97831737f, -0.97570213f, -0.97293995f, -0.97003125f, -0.96697647f, -0.96377607f, -0.96043052f, -0.95694034f, -0.95330604f, -0.94952818f, -0.94560733f, -0.94154407f, -0.93733901f, -0.93299280f, -0.92850608f, -0.92387953f, -0.91911385f, -0.91420976f, -0.90916798f, -0.90398929f, -0.89867447f, -0.89322430f, -0.88763962f, -0.88192126f, -0.87607009f, -0.87008699f, -0.86397286f, -0.85772861f, -0.85135519f, -0.84485357f, -0.83822471f, -0.83146961f, -0.82458930f, -0.81758481f, -0.81045720f, -0.80320753f, -0.79583690f, -0.78834643f, -0.78073723f, -0.77301045f, -0.76516727f, -0.75720885f, -0.74913639f, -0.74095113f, -0.73265427f, -0.72424708f, -0.71573083f, -0.70710678f, -0.69837625f, -0.68954054f, -0.68060100f, -0.67155895f, -0.66241578f, -0.65317284f, -0.64383154f, -0.63439328f, -0.62485949f, -0.61523159f, -0.60551104f, -0.59569930f, -0.58579786f, -0.57580819f, -0.56573181f, -0.55557023f, -0.54532499f, -0.53499762f, -0.52458968f, -0.51410274f, -0.50353838f, -0.49289819f, -0.48218377f, -0.47139674f, -0.46053871f, -0.44961133f, -0.43861624f, -0.42755509f, -0.41642956f, -0.40524131f, -0.39399204f, -0.38268343f, -0.37131719f, -0.35989504f, -0.34841868f, -0.33688985f, -0.32531029f, -0.31368174f, -0.30200595f, -0.29028468f, -0.27851969f, -0.26671276f, -0.25486566f, -0.24298018f, -0.23105811f, -0.21910124f, -0.20711138f, -0.19509032f, -0.18303989f, -0.17096189f, -0.15885814f, -0.14673047f, -0.13458071f, -0.12241068f, -0.11022221f, -0.09801714f, -0.08579731f, -0.07356456f, -0.06132074f, -0.04906767f, -0.03680722f, -0.02454123f, -0.01227154f, -0.00000000f }; inline float fastSin( float x) { float sinVal, fract, in; unsigned short index; float a, b; int n; float findex; in = x * 0.159154943092f; n = (int)in; if (x < 0.0f) { n--; } in = in - (float)n; findex = (float)FAST_MATH_TABLE_SIZE * in; if (findex >= 512.0f) { findex -= 512.0f; } index = ((unsigned short)findex) & 0x1ff; fract = findex - (float)index; a = sinTable_f32[index]; b = sinTable_f32[index + 1]; sinVal = (1.0f - fract)*a + fract*b; return (sinVal); } inline float fastCos( float x) { float cosVal, fract, in; unsigned short index; float a, b; int n; float findex; in = x * 0.159154943092f + 0.25f; n = (int)in; if (in < 0.0f) { n--; } in = in - (float)n; findex = (float)FAST_MATH_TABLE_SIZE * in; index = ((unsigned short)findex) & 0x1ff; fract = findex - (float)index; a = sinTable_f32[index]; b = sinTable_f32[index + 1]; cosVal = (1.0f - fract)*a + fract*b; return (cosVal); } void CPUImageGrayscaleFilter(unsigned char* Input, unsigned char* Output, int Width, int Height, int Stride) { int Channels = Stride / Width; const int B_WT = (int)(0.114 * 256 + 0.5); const int G_WT = (int)(0.587 * 256 + 0.5); const int R_WT = 256 - B_WT - G_WT; // int(0.299 * 256 + 0.5); int Channel = Stride / Width; if (Channel == 3) { for (int Y = 0; Y < Height; Y++) { unsigned char *LinePS = Input + Y * Stride; unsigned char *LinePD = Output + Y * Width; int X = 0; for (; X < Width - 4; X += 4, LinePS += Channel * 4) { LinePD[X + 0] = (B_WT * LinePS[0] + G_WT * LinePS[1] + R_WT * LinePS[2]) >> 8; LinePD[X + 1] = (B_WT * LinePS[3] + G_WT * LinePS[4] + R_WT * LinePS[5]) >> 8; LinePD[X + 2] = (B_WT * LinePS[6] + G_WT * LinePS[7] + R_WT * LinePS[8]) >> 8; LinePD[X + 3] = (B_WT * LinePS[9] + G_WT * LinePS[10] + R_WT * LinePS[11]) >> 8; } for (; X < Width; X++, LinePS += Channel) { LinePD[X] = (B_WT * LinePS[0] + G_WT * LinePS[1] + R_WT * LinePS[2]) >> 8; } } } else if (Channel == 4) { for (int Y = 0; Y < Height; Y++) { unsigned char *LinePS = Input + Y * Stride; unsigned char *LinePD = Output + Y * Width; int X = 0; for (; X < Width - 4; X += 4, LinePS += Channel * 4) { LinePD[X + 0] = (B_WT * LinePS[0] + G_WT * LinePS[1] + R_WT * LinePS[2]) >> 8; LinePD[X + 1] = (B_WT * LinePS[4] + G_WT * LinePS[5] + R_WT * LinePS[6]) >> 8; LinePD[X + 2] = (B_WT * LinePS[8] + G_WT * LinePS[9] + R_WT * LinePS[10]) >> 8; LinePD[X + 3] = (B_WT * LinePS[12] + G_WT * LinePS[13] + R_WT * LinePS[14]) >> 8; } for (; X < Width; X++, LinePS += Channel) { LinePD[X] = (B_WT * LinePS[0] + G_WT * LinePS[1] + R_WT * LinePS[2]) >> 8; } } } else if (Channel == 1) { if (Output != Input) { memcpy(Output, Input, Height*Stride); } } } void CPUImageColorInvertFilter(unsigned char* Input, unsigned char* Output, int Width, int Height, int Stride) { int Channels = Stride / Width; unsigned char invertMap[256] = { 0 }; for (int pixel = 0; pixel < 256; pixel++) { invertMap[pixel] = (255 - pixel); } if (Channels == 1) { for (int Y = 0; Y < Height; Y++) { unsigned char* pOutput = Output + (Y * Stride); unsigned char* pInput = Input + (Y * Stride); for (int X = 0; X < Width; X++) { pOutput[X] = invertMap[pInput[X]]; } } } else { for (int Y = 0; Y < Height; Y++) { unsigned char* pOutput = Output + (Y * Stride); unsigned char* pInput = Input + (Y * Stride); for (int X = 0; X < Width; X++) { pOutput[0] = invertMap[pInput[0]]; pOutput[1] = invertMap[pInput[1]]; pOutput[2] = invertMap[pInput[2]]; pInput += Channels; pOutput += Channels; } } } } float CPUImageCalcSkewAngle(unsigned char* Input, int Width, int Height, cpu_rect *CheckRectPtr, int maxSkewToDetect, int stepsPerDegree, int localPeakRadius, int nLineCount) { cpu_rect CheckRect = *CheckRectPtr; //确定指定的区域在原图片范围内 CheckRect.x = clamp(CheckRect.x, 0, Width - 1); CheckRect.y = clamp(CheckRect.y, 0, Height - 1); CheckRect.Width = clamp(CheckRect.Width, 1, Width - 1); CheckRect.Height = clamp(CheckRect.Height, 1, Height - 1); // 处理参数 maxSkewToDetect = clamp(maxSkewToDetect, 0, 91); localPeakRadius = clamp(localPeakRadius, 1, 10); stepsPerDegree = clamp(stepsPerDegree, 1, 10); int houghHeight = (2 * maxSkewToDetect * stepsPerDegree); float thetaStep = (2 * maxSkewToDetect * M_PI / 180) / houghHeight; int halfWidth = Width >> 1; int halfHeight = Height >> 1; // 计算 Hough 映射宽度 int halfHoughWidth = (int)sqrtf((float)(halfWidth * halfWidth + halfHeight * halfHeight)); int houghWidth = (halfHoughWidth * 2); float minTheta = 90.0f - maxSkewToDetect; unsigned short * houghMap = (unsigned short *)calloc(houghHeight*houghWidth, sizeof(unsigned short)); float* sinMap = (float*)malloc(houghHeight * sizeof(float)); float* cosMap = (float*)malloc(houghHeight * sizeof(float)); cpu_HoughLine* HoughLines = (cpu_HoughLine*)calloc(houghHeight*houghWidth, sizeof(cpu_HoughLine)); if (houghMap == NULL || sinMap == NULL || cosMap == NULL || HoughLines == NULL) { if (houghMap) { free(houghMap); houghMap = NULL; } if (sinMap) { free(sinMap); sinMap = NULL; } if (cosMap) { free(cosMap); cosMap = NULL; } if (HoughLines) { free(HoughLines); HoughLines = NULL; } return 0.0f; } else { // 预计算 Sin 与 Cos表 float mt = (minTheta * M_PI / 180.0f); for (int i = 0; i < houghHeight; i++) { float cur_weight = mt + (i * thetaStep); sinMap[i] = fastSin(cur_weight); cosMap[i] = fastCos(cur_weight); } } int startX = -halfWidth + CheckRect.x; int startY = -halfHeight + CheckRect.y; int stopX = Width - halfWidth - (Width - CheckRect.Width); int stopY = Height - halfHeight - (Height - CheckRect.Height) - 1; int offset = Width - CheckRect.Width; unsigned char* src = Input + CheckRect.y * Width + CheckRect.x; unsigned char* srcBelow = src + Width; for (int Y = startY; Y < stopY; Y++) { for (int X = startX; X < stopX; X++, src++, srcBelow++) { if ((*src < 128) && (*srcBelow >= 128)) { for (int theta = 0; theta < houghHeight; theta++) { int radius = (int)(cosMap[theta] * X - sinMap[theta] * Y) + halfHoughWidth; if ((radius < 0) || (radius >= houghWidth)) { continue; } houghMap[theta*houghWidth + radius]++; } } } src += offset; srcBelow += offset; } // 找到 Hough映射的最大值 float maxMapIntensity = 0.0000000001f; for (int theta = 0; theta < houghHeight; theta++) { unsigned short * houghMapLine = houghMap + theta*houghWidth; for (int radius = 0; radius < houghWidth; radius++) { maxMapIntensity = max(maxMapIntensity, houghMapLine[radius]); } } int minLineIntensity = Width / 10; // 收集大于或等于指定强度的直线 int lineIntensity = 0; bool foundGreater = false; int lineSize = 0; for (int theta = 0; theta < houghHeight; theta++) { unsigned short * houghMapLine = houghMap + theta*houghWidth; for (int radius = 0; radius < houghWidth; radius++) { // 取当前强度 lineIntensity = houghMapLine[radius]; if (lineIntensity < minLineIntensity) { continue; } foundGreater = false; // 检查邻边 for (int t = theta - localPeakRadius, ttMax = theta + localPeakRadius; t < ttMax; t++) { //跳过map值 if (t < 0) { continue; } if (t >= houghHeight) { break; } //如果不是局部最大则跳出 if (foundGreater == true) { break; } for (int r = radius - localPeakRadius, trMax = radius + localPeakRadius; r < trMax; r++) { //跳过map值 if (r < 0) { continue; } if (r >= houghWidth) { break; } // 当前值与邻边对比 if (houghMap[t*houghWidth + r] > lineIntensity) { foundGreater = true; break; } } } // 可能是局部最大值,记录下来 if (!foundGreater) { cpu_HoughLine tempVar; tempVar.Theta = 90.0f - maxSkewToDetect + (theta) / stepsPerDegree; tempVar.Radius = (radius - halfHoughWidth); tempVar.Intensity = lineIntensity; tempVar.RelativeIntensity = lineIntensity / maxMapIntensity; HoughLines[lineSize] = tempVar; lineSize++; } } } float skewAngle = 0; if (lineSize > 0) { //排序,从大到小 cpu_HoughLine temp; for (int i = 0; i < lineSize; i++) { for (int j = 0; j < lineSize - 1; j++) { if (HoughLines[j].Intensity < HoughLines[j + 1].Intensity) { temp = HoughLines[j + 1]; HoughLines[j + 1] = HoughLines[j]; HoughLines[j] = temp; } } } int n = min(nLineCount, lineSize); float sumIntensity = 0; for (int i = 0; i < n; i++) { if (HoughLines[i].RelativeIntensity > 0.5f) { skewAngle += (HoughLines[i].Theta * HoughLines[i].RelativeIntensity); sumIntensity += HoughLines[i].RelativeIntensity; } } skewAngle = skewAngle / sumIntensity; } if (houghMap) { free(houghMap); houghMap = NULL; } if (sinMap) { free(sinMap); sinMap = NULL; } if (cosMap) { free(cosMap); cosMap = NULL; } if (HoughLines) { free(HoughLines); HoughLines = NULL; } if (skewAngle != 0) { return skewAngle - 90.0f; } return skewAngle; } void CPUImageRotateBilinear(unsigned char * Input, int Width, int Height, int Stride, unsigned char * Output, int outWidth, int outHeight, float angle, bool keepSize, int fillColorR, int fillColorG, int fillColorB) { if (Input == NULL || Output == NULL) return; float oldXradius = (float)(Width - 1) / 2; float oldYradius = (float)(Height - 1) / 2; // 输出图像的半径大小 float newXradius = (float)(outWidth - 1) / 2; float newYradius = (float)(outHeight - 1) / 2; // 角度的正弦和余弦 float angleRad = -angle * M_PI / 180.0f; float angleCos = fastCos(angleRad); float angleSin = fastSin(angleRad); int Channels = Stride / Width; int dstOffset = outWidth*Channels - ((Channels == 1) ? outWidth : outWidth * Channels); // 背景色 unsigned char fillR = fillColorR; unsigned char fillG = fillColorG; unsigned char fillB = fillColorB; // 临界点 int lastHeight = Height - 1; int lastWidth = Width - 1; // 四点指针 unsigned char* src = (unsigned char*)Input; unsigned char* dst = (unsigned char*)Output; // cx, cy 目标像素的相对于图像中心的坐标 if (Channels == 1) { float cy = -newYradius; for (int y = 0; y < outHeight; y++) { const float tx = angleSin * cy + oldXradius; const float ty = angleCos * cy + oldYradius; float cx = -newXradius; for (int x = 0; x < outWidth; x++, dst++) { // 初始起点位置 const float ox = tx + angleCos * cx; const float oy = ty - angleSin * cx; const int ox1 = (int)ox; const int oy1 = (int)oy; // 判断是否为有效区域 if ((ox1 < 0) || (oy1 < 0) || (ox1 >= Width) || (oy1 >= Height)) { // 无效区域填充背景 *dst = fillG; } else { // 边界点处理 const int ox2 = (ox1 == lastWidth) ? ox1 : ox1 + 1; const int oy2 = (oy1 == lastHeight) ? oy1 : oy1 + 1; float dx1 = ox - (float)ox1; if (dx1 < 0) dx1 = 0; const float dx2 = 1.0f - dx1; float dy1 = oy - (float)oy1; if (dy1 < 0) dy1 = 0; const float dy2 = 1.0f - dy1; unsigned char*p1 = src + oy1 * Stride; unsigned char* p2 = src + oy2 * Stride; // 进行四点插值 *dst = (unsigned char)( dy2 * (dx2 * p1[ox1] + dx1 * p1[ox2]) + dy1 * (dx2 * p2[ox1] + dx1 * p2[ox2])); } cx++; } cy++; dst += dstOffset; } } else { float cy = -newYradius; for (int y = 0; y < outHeight; y++) { const float tx = angleSin * cy + oldXradius; const float ty = angleCos * cy + oldYradius; float cx = -newXradius; for (int x = 0; x < outWidth; x++, dst += Channels) { // 初始起点位置 const float ox = tx + angleCos * cx; const float oy = ty - angleSin * cx; const int ox1 = (int)ox; const int oy1 = (int)oy; // 判断是否为有效区域 if ((ox1 < 0) || (oy1 < 0) || (ox1 >= Width) || (oy1 >= Height)) { // 无效区域填充背景 dst[0] = fillR; dst[1] = fillG; dst[2] = fillB; } else { // 边界点处理 const int ox2 = (ox1 == lastWidth) ? ox1 : ox1 + 1; const int oy2 = (oy1 == lastHeight) ? oy1 : oy1 + 1; float dx1 = ox - (float)ox1; if (dx1 < 0) dx1 = 0; const float dx2 = 1.0f - dx1; float dy1 = oy - (float)oy1; if (dy1 < 0) dy1 = 0; const float dy2 = 1.0f - dy1; // 计算四点的坐标 unsigned char* p1 = src + oy1 * Stride; unsigned char* p2 = p1; p1 += ox1 * Channels; p2 += ox2 * Channels; unsigned char* p3 = src + oy2 * Stride; unsigned char* p4 = p3; p3 += ox1 * Channels; p4 += ox2 * Channels; // 进行四点插值 dst[0] = (unsigned char)( dy2 * (dx2 * p1[0] + dx1 * p2[0]) + dy1 * (dx2 * p3[0] + dx1 * p4[0])); dst[1] = (unsigned char)( dy2 * (dx2 * p1[1] + dx1 * p2[1]) + dy1 * (dx2 * p3[1] + dx1 * p4[1])); dst[2] = (unsigned char)( dy2 * (dx2 * p1[2] + dx1 * p2[2]) + dy1 * (dx2 * p3[2] + dx1 * p4[2])); } cx++; } cy++; dst += dstOffset; } } } bool CPUImageIsTextImage(unsigned char * Input, int Width, int Height) { const int blacklimit = 20; const int greylimit = 140; const int contrast_offset = 80; int prev_color[256]; int cur_color[256]; for (int i = 0; i < 256; i++) { cur_color[i] = 0; prev_color[i] = 0; } for (int i = 0; i <= blacklimit; i++) { //黑色 cur_color[i] = 100; prev_color[i] = 100000; } for (int i = blacklimit + 1 + contrast_offset; i <= greylimit; i++) { //灰色 cur_color[i] = 10; prev_color[i] = 10000; } for (int i = greylimit + 1 + contrast_offset; i <= 255; i++) { //白色 cur_color[i] = 1; prev_color[i] = 1000; } int line_count = 0; int n = -1; for (int y = 0; y < Height; y += 10) { n++; int white_amt = 0; unsigned char * buffer = Input + y*Width; int x = 0; for (x = 1; x < Width; x++) { const unsigned char prev_pixel = buffer[(x - 1)]; const unsigned char cur_pixel = buffer[x]; if ((prev_color[prev_pixel]) && (cur_color[cur_pixel])) { //是否是白色 if ((prev_color[prev_pixel] + cur_color[cur_pixel]) == 1001) { white_amt++; } } } //白色的一行 if (((float)white_amt / (float)x) > 0.85f) { line_count++; } } float line_count_ratio = (n != 0.f) ? (float)line_count / (float)n : 0.0f; if (line_count_ratio < 0.4f || line_count_ratio > 1.0f) { return false; } return true; } bool CPUImageDocumentDeskew(unsigned char * Input, unsigned char *Output, int Width, int Height, int Stride) { if (Input == NULL || Output == NULL || Input == Output) return false; int Channels = Stride / Width; //最大倾斜角度 int maxSkewToDetect = 89; cpu_rect rect = { 0 }; rect.Width = Width; rect.Height = Height; // 以最大权重的2条直线为基准计算倾斜角度 int nLineCount = 2; //角度步进数 int stepsPerDegree = 1; //局部临界半径 int localPeakRadius = 10; CPUImageGrayscaleFilter(Input, Output, Width, Height, Stride); if (!CPUImageIsTextImage(Output, Width, Height)) { CPUImageColorInvertFilter(Output, Output, Width, Height, Width); } float skewAngle = CPUImageCalcSkewAngle(Output, Width, Height, &rect, maxSkewToDetect, stepsPerDegree, localPeakRadius, nLineCount); if ((skewAngle == 0) || (skewAngle < -maxSkewToDetect || skewAngle > maxSkewToDetect)) { memcpy(Output, Input, Height* Stride * sizeof(unsigned char)); return false; } else { CPUImageRotateBilinear(Input, Width, Height, Stride, Output, Width, Height, -skewAngle, true, 255, 255, 255); } return true; } //分割路径函数 void splitpath(const char* path, char* drv, char* dir, char* name, char* ext) { const char* end; const char* p; const char* s; if (path[0] && path[1] == ‘:‘) { if (drv) { *drv++ = *path++; *drv++ = *path++; *drv = ‘\\0‘; } } else if (drv) *drv = ‘\\0‘; for (end = path; *end && *end != ‘:‘;) end++; for (p = end; p > path && *--p != ‘\\\\‘ && *p != ‘/‘;) if (*p == ‘.‘) { end = p; break; } if (ext) for (s = end; (*ext = *s++);) ext++; for (p = end; p > path;) if (*--p == ‘\\\\‘ || *p == ‘/‘) { p++; break; } if (name) { for (s = p; s < end;) *name++ = *s++; *name = ‘\\0‘; } if (dir) { for (s = path; s < p;) *dir++ = *s++; *dir = ‘\\0‘; } } //取当前传入的文件位置 void getCurrentFilePath(const char *filePath, char *saveFile) { char drive[_MAX_DRIVE]; char dir[_MAX_DIR]; char fname[_MAX_FNAME]; char ext[_MAX_EXT]; splitpath(filePath, drive, dir, fname, ext); int n = strlen(filePath); memcpy(saveFile, filePath, n); char * cur_saveFile = saveFile + (n - strlen(ext)); cur_saveFile[0] = ‘_‘; cur_saveFile[1] = 0; } int main(int argc, char **argv) { printf("Image Processing \\n "); printf("博客:http://tntmonks.cnblogs.com/ \\n "); printf("支持解析如下图片格式: \\n "); printf("JPG, PNG, TGA, BMP, PSD, GIF, HDR, PIC \\n "); //检查参数是否正确 if (argc < 2) { printf("参数错误。 \\n "); printf("请拖放文件到可执行文件上,或使用命令行:imageProc.exe 图片 \\n "); printf("请拖放文件例如: imageProc.exe d:\\\\image.jpg \\n "); return 0; } char*szfile = argv[1]; //检查输入的文件是否存在 if (_access(szfile, 0) == -1) { printf("输入的文件不存在,参数错误! \\n "); } getCurrentFilePath(szfile, saveFile); int Width = 0; //图片宽度 int Height = 0; //图片高度 int Channels = 0; //图片通道数 unsigned char *inputImage = NULL; //输入图片指针 double startTime = now(); //加载图片 inputImage = loadImage(szfile, &Width, &Height, &Channels); double nLoadTime = calcElapsed(startTime, now()); printf("加载耗时: %d 毫秒!\\n ", (int)(nLoadTime * 1000)); if ((Channels != 0) && (Width != 0) && (Height != 0)) { //分配与载入同等内存用于处理后输出结果 unsigned char *outputImg = (unsigned char *)stbi__malloc(Width * Channels * Height * sizeof(unsigned char)); if (inputImage) { //如果图片加载成功,则将内容复制给输出内存,方便处理 memcpy(outputImg, inputImage, Width * Channels * Height); } else { printf("加载文件: %s 失败!\\n ", szfile); } startTime = now(); //处理算法 CPUImageDocumentDeskew(inputImage, outputImg, Width, Height, Width*Channels); double nProcessTime = calcElapsed(startTime, now()); printf("处理耗时: %d 毫秒!\\n ", (int)(nProcessTime * 1000)); //保存处理后的图片 startTime = now(); saveImage("_done.jpg", Width, Height, Channels, outputImg); double nSaveTime = calcElapsed(startTime, now()); printf("保存耗时: %d 毫秒!\\n ", (int)(nSaveTime * 1000)); //释放占用的内存 if (outputImg) { stbi_image_free(outputImg); outputImg = NULL; } if (inputImage) { stbi_image_free(inputImage); inputImage = NULL; } } else { printf("加载文件: %s 失败!\\n", szfile); } getchar(); printf("按任意键退出程序 \\n"); return EXIT_SUCCESS; }
项目地址:https://github.com/cpuimage/deskew
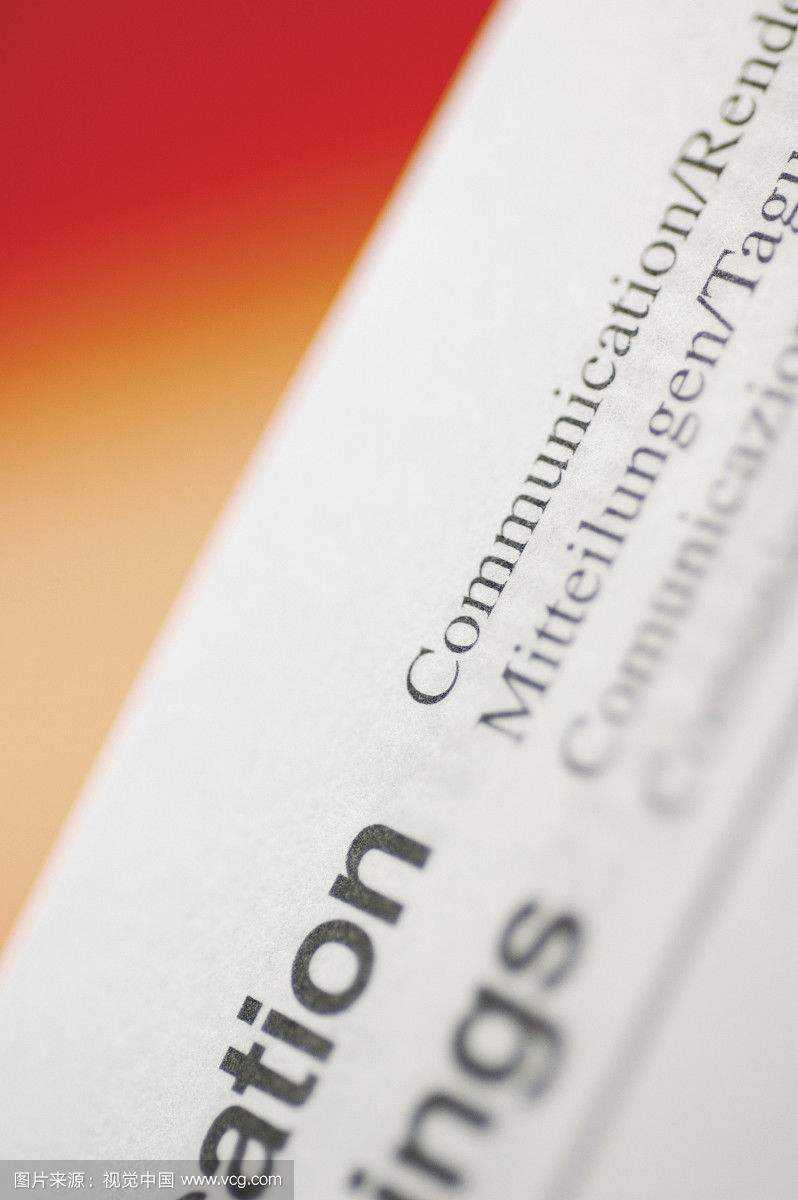
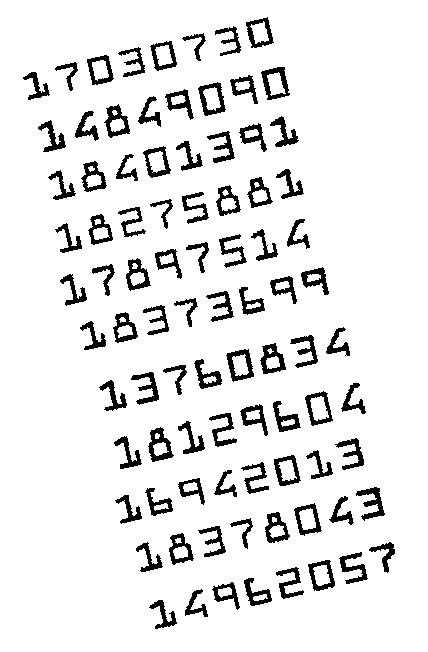
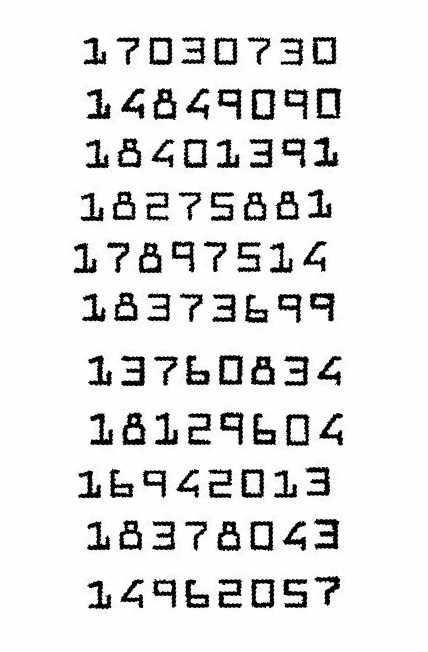
贴上几张效果图.

以上,权当抛砖引玉。
若有其他相关问题或者需求也可以邮件联系俺探讨。
邮箱地址是:
[email protected]