ROS nodelet的使用
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS nodelet的使用相关的知识,希望对你有一定的参考价值。
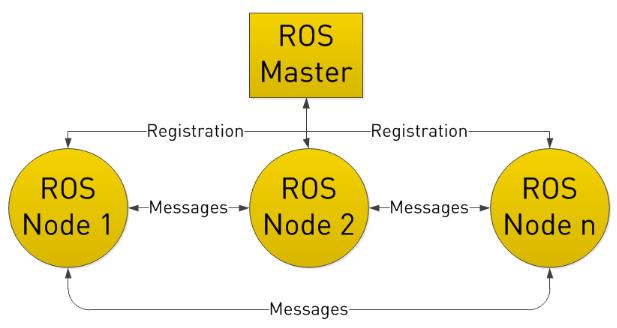
ROS是一种基于分布式网络通讯的操作系统,整个机器人控制系统是由一个Master主节点和若干个功能相对独立的Node子节点组成,这也是ROS系统最主要的特点就是分布式以及模块化的设计。在ROS通讯过程中Master节点存储着各个子节点的topics和services的注册信息,每个功能节点在请求服务之前先向主节点进行注册,然后节点之间就可以直接进行信息传递。ROS的底层通信都是基于XML-RPC协议实现的。
XML-RPC协议是XML Remote Prodecure Call的简称,是一种远程过程调用的分布式网络协议。它允许跨平台的软件间通过发送和接收XML格式的消息进行远程调用,即允许不同的操作系统、不同环境中的程序实现基于Internet过程调用的规范和一系列方法的实现。这种远程过程调用使用http作为传输协议,XML作为传送信息的编码格式。

XML-RPC的远程调用过程为:首先客户端发起请求后需要按照协议格式对请求信息进行填充;填充完毕以后XML格式的信息会被转化为数据流,通过传输层进行传输。服务端收到客户端发出来的数据流,会将其再转化为XML格式的信息,然后按照XML-RPC协议获取客户端的请求信息,并对请求信息进行处理,处理完毕以后将反馈信息发送给客户端。
以XML-RPC的方式传输数据存在一定的延时和阻塞。在数据量小、频率低的情况下,传输耗费的时间可以忽略不计。但当传输图像流,点云等数据量较大的消息,或者执行有一定的实时性要求的任务时,因传输而耗费的时间就不得不考虑。Nodelet包就是为改善这一状况设计的,它提供一种方法,可以让多个算法程序在一个进程中用 shared_ptr 实现零拷贝通信(zero copy transport),以降低因为传输大数据而损耗的时间。简单讲就是可以将多个node捆绑在一起管理,使得同一个manager里面的topic的数据传输更快。
运行nodelet
nodelet用法:
nodelet manager - Launch a nodelet manager node. 启动一个manager
nodelet load pkg/Type manager - Launch a nodelet of type pkg/Type on manager manager. 向manager中加载nodelet
nodelet standalone pkg/Type - Launch a nodelet of type pkg/Type in a standalone node.
nodelet unload name manager - Unload a nodelet a nodelet by name from manager. 从manager中移除nodelet
下面看一个简单的nodelet例子,程序会将内部变量value加上输入in的值,然后再发布到out话题上。首先在终端中运行roscore打开ROS master节点,然后输入下面指令开启一个名字为nodelet_manager的manager节点(A nodelet will be run inside a NodeletManager)
rosrun nodelet nodelet manager __name:=nodelet_manager
注意rosrun命令中可以显式设置节点的名称,语法为:rosrun package-name executable-name __name:=node-name 这种方法将使用node-name参数给出的名称覆盖节点的默认名。
然后向创建的nodelet_manager中加载pkg/Type为nodelet_tutorial_math/Plus的nodelet节点,并将其重命名为nodelet1,nodelet1/in话题重映射为foo,value值设为1.1
rosrun nodelet nodelet load nodelet_tutorial_math/Plus nodelet_manager __name:=nodelet1 nodelet1/in:=foo _value:=1.1
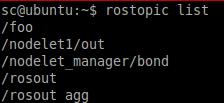
输入rostopic list命令查看topic:
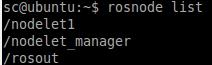
输入rosnode list查看当前运行的节点:
下面我们在foo话题上发布消息,相当于给in赋值5.0
rostopic pub /foo std_msgs/Float64 5.0 -r 10
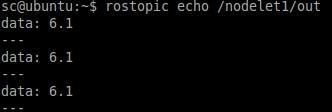
使用rostopic echo查看out的结果:
rostopic echo /nodelet1/out
可以看出结果为6.1(5.0+1.1=6.1):
输入rqt_graph命令,可以在GUI界面中直观地查看节点间的交互方式 :
rqt_graph

也可以在roslaunch文件中使用nodelet. 下面的例子中先创建一个名为standalone_nodelet的manager,然后向其中加载Plus和Plus2这两个nodelet节点:
<launch> <node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager" output="screen"/> <node pkg="nodelet" type="nodelet" name="Plus" args="load nodelet_tutorial_math/Plus standalone_nodelet" output="screen"> <remap from="/Plus/out" to="Plus2/in"/> </node> <rosparam param="Plus2" file="$(find nodelet_tutorial_math)/plus_default.yaml"/> <node pkg="nodelet" type="nodelet" name="Plus2" args="load nodelet_tutorial_math/Plus standalone_nodelet" output="screen"> <rosparam file="$(find nodelet_tutorial_math)/plus_default.yaml"/> </node> <node pkg="nodelet" type="nodelet" name="Plus3" args="standalone nodelet_tutorial_math/Plus" output="screen"> <param name="value" type="double" value="2.5"/> <remap from="Plus3/in" to="Plus2/out"/> </node> </launch>
launch文件中使用remap标签将Plus的输出重映射到Plus2的输入,并将Plus2的输出重映射到Plus3的输入上,可以实现叠加功能。
plus_default.yaml中的内容如下,即Plus2节点中的value值为10:
value: 10
下面运行plus.launch文件:
roslaunch nodelet_tutorial_math plus.launch
然后在Plus的输入端发布数据:
rostopic pub -r 10 /Plus/in std_msgs/Float64 1.0
查看Plus2的输出(1+10=11):

查看Plus3的输出(11+2.5=13.5):
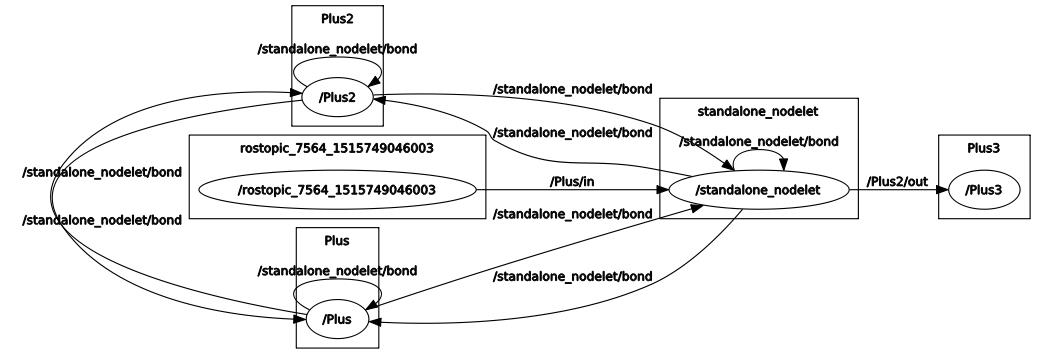
使用rqt_graph命令查看节点:
编写nodelet
编写一个nodelet(nodelet基于pluginlib插件机制)的步骤如下:
- add the necessary #includes
- get rid of int main()
- subclass nodelet::Nodelet (基类nodelet::Nodelet,任何nodelet继承自它可以使用plugin的方式动态加载)
- move code from constructor to onInit() (实现onInit纯虚函数,用于初始化)
- add the PLUGINLIB_EXPORT_CLASS macro (加入宏,将子类声明为插件类,并编译为动态库)
-
add <build_depend> and <run_depend> dependencies on nodelet in the package manifest.
-
add the <nodelet> item in the <export> part of the package manifest
- create the .xml file to define the nodelet as a plugin
- make the necessary changes to CMakeLists.txt
plus.cpp代码功能就是两个数相加:
#include <pluginlib/class_list_macros.h> #include <nodelet/nodelet.h> #include <ros/ros.h> #include <std_msgs/Float64.h> #include <stdio.h> #include <math.h> //fabs namespace nodelet_tutorial_math // The usage of the namespace is a good practice but not mandatory { class Plus : public nodelet::Nodelet { public: Plus(): value_(0) {} private: virtual void onInit() //当nodelet插件类被nodelet_manager加载时,nodelet插件类的onInit方法就会被调用,用于初始化插件类 { ros::NodeHandle& private_nh = getPrivateNodeHandle(); private_nh.getParam("value", value_); pub = private_nh.advertise<std_msgs::Float64>("out", 10); sub = private_nh.subscribe("in", 10, &Plus::callback, this); } void callback(const std_msgs::Float64::ConstPtr& input) { std_msgs::Float64Ptr output(new std_msgs::Float64()); output->data = input->data + value_; NODELET_DEBUG("Adding %f to get %f", value_, output->data); pub.publish(output); } ros::Publisher pub; ros::Subscriber sub; double value_; }; PLUGINLIB_DECLARE_CLASS(nodelet_tutorial_math, Plus, nodelet_tutorial_math::Plus, nodelet::Nodelet); }
注意为了允许类被动态加载,它必须被标记为导出类。这通过特殊宏PLUGINLIB_EXPORT_CLASS/PLUGINLIB_DECLARE_CLASS来完成,通常放在导出类的.cpp文件的末尾。 宏的参数分别为:pkg, class_name, class_type, base_class_type.
为了让pluginlib查询ROS系统上的所有可用插件,每个包必须显式指定它导出的插件。相应的package.xml中要加入下面内容:
... <build_depend>nodelet</build_depend> <run_depend>nodelet</run_depend>
<export> <nodelet plugin="${prefix}/nodelet_math.xml" /> </export> ...
插件描述文件是一个XML文件,用于存储有关插件的所有重要信息。 它包含有关插件所在的库的信息,插件的名称,插件的类型等 。nodelet_math.xml如下:
<library path="lib/libnodelet_math"> <class name="nodelet_tutorial_math/Plus" type="nodelet_tutorial_math::Plus" base_class_type="nodelet::Nodelet"> <description> A node to add a value and republish. </description> </class> </library>
参考:
以上是关于ROS nodelet的使用的主要内容,如果未能解决你的问题,请参考以下文章