冈萨雷斯《数字图像处理》第3版课后习题
Posted 凤凰_1
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了冈萨雷斯《数字图像处理》第3版课后习题相关的知识,希望对你有一定的参考价值。
第3章
3.6
原题:试解释为什么离散直方图均衡技术一般不能得到平坦的直方图?
答:假设有一副图像,共有像素个数为n=MN(M行N列),像素灰度值取值范围为(0~255),那么该图像的灰度值的个数为L=256,为了提高图像的对比度,通常我们都希望像素的灰度值不要都局促到某一个狭窄的范围,也就是我们通常说的图像灰度值的动态分布小。最好是在有效灰度值取值范围上,每个灰度值都有MN/L个像素,这个时候我们就可以得到一张对比度最理想的图像,也就是说像素的取值跨度大,像素灰度值的动态范围大。
因为直方图是PDF(概率密度函数)的近似,而且在处理中,不允许造成新的灰度级,所以在实际的直方图均衡应用中,很少见到完美平坦的直方图。因此,直方图均衡技术不能保证直方图的均匀分布,但是却可以扩展直方图的分布范围,也就意味着在直方图上,偏向左的暗区和偏向右的亮区都有像素分布,只是不能保证每个灰度级上都有像素分布。
(百度答案:)由于离散图像的直方图也是离散的,其灰度累积分布函数是一个不减的阶梯函数。如果映射后的图像仍然能取到所有灰度级,则不发生任何变化。如果映射的灰度级小于256,变换后的直方图会有某些灰度级空缺。即调整后灰度级的概率基本不能取得相同的值,故产生的直方图不完全平坦。
3.8
原题:在某些应用中,将输入图像的直方图模型化为高斯概率密度函数效果会是比较好的,高斯概率密度函数为:

其中m和σ分别是高斯概率密度函数的均值和标准差。具体处理方法是将m和σ看成是给定图像的平均灰度级和对比度。对于直方图均衡,您所用的变换函数是什么?
答:直方图均衡变换函数的一般表达式如下:
在回答这个问题时,有两点非常重要,需要学生表达清楚。
第一, 这个表达式假定灰度值r只有正值,然而,高斯密度函数通常的取值范围是-∞~∞,认识到这点是非常重要的,认识到这点,学生才能以多种不同的方式来解决问题。对于像标准差这样的假设,好的答案是,需要足够小,以便于当r为小于0时,在pr(r)曲线下的面积可以被忽略。另一种回答就是,将值(不知道什么值)按比例增大,直到r小于0部分的曲线下的面积可以被忽略。
第二,要让学生认识到,变换函数本身,

并没有闭合形式解(closed-form solution)。这是高斯密度函数的累积分布函数,该函数或者是数字可积的,或者其值有表可查。
第三点,不是很重要,但学生要说清楚,那就是r的高端值(high-end value)。再强调一遍,高斯PDF是趋于正无穷(+∞)的,一个可行性的方法就是根据标准差,和前面一样对其做个假设。另一个可行方法就是除以一个足够大的值,使得在大于r部分函数曲线下的面积可以忽略(这实际上就是相当于比例缩小标准差)。
学生还需做的工作就是处理直方图,此时的变换函数是一种和的形式。负值和超过r的正值问题还是需要说明白,对于这些问题,前面建议的答案依然适用。学生需要指出,直方图是通过对连续函数采样得到的,所以对于采样的比特位数应该给出建议。最可能的答案是8比特,此时学生还需描述函数缩放比例,以便其取值在[0,255]范围之内。
Opencv中的均值和标准差函数meanStdDev
C++: void meanStdDev(InputArray src, OutputArray mean, OutputArray stddev, InputArray
mask=noArray())
C: void cvAvgSdv(const CvArr* arr, CvScalar* mean, CvScalar* std_dev, const CvArr* mask=NULL )
Python: cv.AvgSdv(arr, mask=None) -> (mean, stdDev)
Parameters
src – 输入矩阵,通道数为1~4,input array that should have from 1 to 4 channels so that the results can be stored in
Scalar_ ‘s.
mean – 输出参数,数据类型为Match,用于保存均值。
stddev –输出参数,数据类型为Mat,用于保存标准差。
mask – 可选的mask运算。
函数meanStdDev 用于计算每个通道上的均值和标准差,分别保存在mean和std_dev中。
meanStdDev实例
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
Mat img=imread("D:/CodeWork/MyImage/baboon.jpg",0);
// imshow("my test image!",img);
Mat mat_mean,mat_stddev;
meanStdDev(img,mat_mean,mat_stddev);
double m,s;
m=mat_mean.at<double>(0,0);
s=mat_stddev.at<double>(0,0);
cout<<"mean="<<m<<endl;
cout<<"stddev="<<s<<endl;
waitKey();
return 0;
}
输出结果如下:

高斯PDF函数实例
在本例中,依然借用上一个实例中的图片的均值和方差,根据本题中的高斯PDF公式:

创建高斯概率密度函数曲线,即高斯PDF,该“曲线”实际上就是一个一维Mat型数据,用pr表示,p表示概率,r表示灰度级。上面的公式中的σ用s表示,只是为了方便,与前面的s不要弄混。
void plot(const Mat&src,const string winName="PlotWindow") { int rows=src.rows,cols=src.cols ; if(rows!=1&&cols!=1) { cout<<"your input is not one dim!"<<endl; return; } double minv,maxv; minMaxLoc(src,&minv,&maxv); int wx=cols*1.4,wy=maxv*1.2; int blankLeft=cols*0.2; int blankBottom=maxv*0.1; namedWindow(winName); Mat img(wy,wx,CV_8UC3,Scalar::all(0)); //绘制坐标轴 Point origin(blankLeft,wy-blankBottom); Point arrowx(wx-10,wy-blankBottom); Point arrowy(blankLeft,10); plotCoordinate(img,origin,arrowx,arrowy,Scalar(0,255,255)); //绘制高斯PDF曲线 Point p1,p2; if(rows==1) { for(int i=0;i<cols-1;i++) { p1.x=i+blankLeft; p1.y=src.at<uchar>(0,i); p1.y =wy-p1.y-blankBottom; p2.x=i+1+blankLeft; p2.y=src.at<uchar>(0,i+1); p2.y=wy-p2.y-blankBottom; line(img,p1,p2,Scalar(255,0,255),3); } } else { for(int i=0;i<rows-1;i++) { p1.y=i; p1.x=src.at<uchar>(0,i); p2.y=i+1; p2.x=src.at<uchar>(0,i+1); line(img,p1,p2,Scalar(255,0,255),3); } } //cv::resize(img,img,Size(img.cols*2,img.rows*2)); imshow(winName,img);
//有些系统不能按“alt+PrtSc”会直接退出,所以要用waitKey等待5秒,同时在主程序中也要有waitKey(),否则还是会自动退出。
waitKey(500000);
}
在plot()函数还调用了绘制坐标函数
void plotCoordinate(Mat& src,Point origin,Point px,Point py,Scalar color)
src--准备绘制坐标轴的矩阵;
origin--坐标原点;
px --x轴坐标端点;
py ----y轴坐标端点;
绘制坐标函数定义如下:
void plotCoordinate(Mat& src,Point origin,Point px,Point py,Scalar color) { line(src,origin,px,color); line(src,origin,py,color); line(src,px,Point(px.x-10,px.y-3),color); line(src,px,Point(px.x-10,px.y+3),color); line(src,py,Point(py.x+3,py.y+10),color); line(src,py,Point(py.x-3,py.y+10),color); }
下面是主程序:
int main() { Mat img=imread("D:/CodeWork/MyImage/baboon.jpg",0); // imshow("my test image!",img); Mat mat_mean,mat_stddev; meanStdDev(img,mat_mean,mat_stddev); double m,s;//m是均值,s是标准差 m=mat_mean.at<double>(0,0); s=mat_stddev.at<double>(0,0); // cout<<"mean="<<m<<endl; // cout<<"stddev="<<s<<endl; Mat pr(1,256,CV_64F,Scalar::all(0)); s *=0.2;//标准差s分别乘以0.2,0.5,1,1.5,2时,观察高斯曲线的变化 for(int r=0;r<256;r++) { pr.at<double>(0,r)= std::exp(-(r-m)*(r-m)/(2*s*s))/(sqrt(2*3.14)*s); } cv::normalize(pr,pr,1,0,NORM_MINMAX); pr=pr*255;//将取值范围扩展到255 pr.convertTo(pr,CV_8U); cout<<"pr="<<endl<<pr<<endl; plot(pr,"s*0.2"); waitKey(); return 0; }
下面是标准差s乘以0.2、0.5、1、1.5、2时,高斯PDF函数曲线的变化情况:




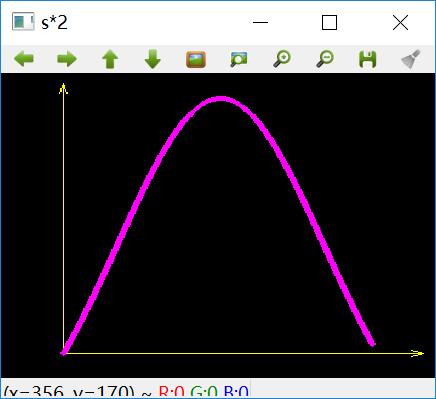
接下来,我们利用上面五个不同标准差值,根据公式(3)将高斯概率密度分布函数转换成高斯概率累积分布函数,实现程序如下:





从T(r)曲线的变化我们可以发现,随着标准差的增大,T(r)曲线越来越接近45°直线,当标准差放大6倍时,已经是一条45°直线了,这意味着标准差越大,该变换曲线,对变换结果的影响越小。
3.24
原题:证明如式(3.6-3)所示的拉普拉斯变换是各向同性的(即旋转不变)。您需要下列轴旋转θ角的坐标方程为:
![]()
其中(x,y)为未旋转的坐标,而为旋转后的坐标。
答案:
坐标未旋转时的拉普拉斯运算表达式如下:

坐标旋转后的表达式如下:

我们已经知道,坐标旋转公式为:
![]()
其中θ为旋转角度,为了证明前面两个拉普拉斯表达式的右边相等,我们先求解f对x’的一阶导数在原坐标中的表达式:

对上面的表达式继续微分得到:

同理,我们也可以求得的原坐标表达式:
![]()
将两个二阶微分表达式相加,我们就得到:

这样我们就证明了,拉普拉斯运算是旋转无关的运算。
3.25
中心为-4的拉普拉斯模板,执行的是水平和垂直方向上的差分运算。我们可以先考察一个 3×3的拉普拉斯模板,模板的中心值为-2,中心上下都为1,其它元素值为0,这样的模板只是执行了垂直方向的差分,
而与之正交的亮度值的变化却被忽略了,经过该模板处理的图像,只有在垂直方向的像素会被锐化增强。而中心值为-4的模板则同时对垂直和水平两个方向上进行微分处理,因此在垂直和水平两个方向的像素都得到了锐化增强,
这样的增强效果也会比单方向的锐化更明显。同样的,中心值为-8的模板对图像执行了四个方向上的锐化增强,这样通常会得到更好的锐化结果。
3.26





图3.26
(a) 3×3 拉普拉斯模板的尺寸和系数是直接有方程(3.6-6)得到的,该方程为
▽2f(x,y)=f(x+1,y)+f(x-1,y)+f(x,y+1)+f(x,y-1)-4f(x,y)
换句话说,拉普拉斯模板中的数字,就是二阶微分方程中的系数。如果用一个更大的“类拉普拉斯模板”与图像卷积,并不会实现图像的二阶微分,所以我们也不要指望能够给出一个更加锐化的结果。
实际上,正如在(b)中解释的,不但不会锐化,反而变得模糊了。
(b)通常,增大“类拉普拉斯模板”的尺寸,会使图像变得模糊。为什么会这样呢?我们先假设有一个图像,该图像是由两个垂直的条带组成,左边是黑色条带右边是白色条带,黑白的分界线刚好通过
图像的中心,也就是说图像的中心有一个锐利的垂直边线,如图3.26所示。在书上正文98页,图3.36中,我们知道,当3×3拉普拉斯模板中心位于垂直边线上时,二阶微分会在垂直边线区域产生一
个双边线;这是由于当模板中心在垂直边线上继续移动超过两个像素时,该模板所包围的区域像素值相同,经卷积计算后该区域的值为0。然而,如果模板太大,当模板中心位于黑色区域时,模板的
一半完全处于黑色区域,而依据模板尺寸的大小,模板的一部分会处于图像的白色区域,这样卷积结果将不再是二阶微分的0,这意味着卷积后,本该为0的区域不再是0,图3.26显示了卷积效果。
图中左上角就是准备被处理的图像,紧挨着的图像是用中心为8的 3×3 拉普拉斯模板卷积结果。其它图像是分别用尺度 15×15, 35×35, 75×75,and 125 ×125类拉普拉斯模板卷积后的结果。随着模板尺寸
的增加,图像变得越来越模糊。
以上是关于冈萨雷斯《数字图像处理》第3版课后习题的主要内容,如果未能解决你的问题,请参考以下文章