SURF算法
Posted 进击的学徒
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了SURF算法相关的知识,希望对你有一定的参考价值。
一、原理:
Sift算法的优点是特征稳定,对旋转、尺度变换、亮度保持不变性,对视角变换、噪声也有一定程度的稳定性;缺点是实时性不高,并且对于边缘光滑目标的特征点提取能力较弱。
Surf(Speeded Up Robust Features)改进了特征的提取和描述方式,用一种更为高效的方式完成特征的提取和描述。
二、Surf实现流程如下:
1. 构建Hessian(黑塞矩阵),生成所有的兴趣点,用于特征的提取
黑塞矩阵(Hessian Matrix)是一个多元函数的二阶偏导数构成的方阵,描述了函数的局部曲率。由德国数学家Ludwin Otto Hessian于19世纪提出。
surf构造的金字塔图像与sift有很大不同,Sift采用的是DOG图像,而surf采用的是Hessian矩阵行列式近似值图像。
Hessian矩阵是Surf算法的核心,构建Hessian矩阵的目的是为了生成图像稳定的边缘点(突变点),为下文的特征提取做好基础。
每一个像素点都可以求出一个Hessian矩阵。
Hessian矩阵的判别式为:
当Hessian矩阵的判别式取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置。
在SURF算法中,图像像素l(x,y)即为函数值f(x,y)。但是由于我们的特征点需要具备尺度无关性,所以在进行Hessian矩阵构造前,需要对其进行高斯滤波,选用二阶标准高斯函数作为滤波器。
通过特定核间的卷积计算二阶偏导数。通过特定核间的卷积计算二阶偏导数,这样便能计算出H矩阵的三个矩阵元素L_xx, L_xy, L_yy从而计算出H矩阵:
由于高斯核是服从正态分布的,从中心点往外,系数越来越低,为了提高运算速度,Surf使用了盒式滤波器来近似替代高斯滤波器,提高运算速度。
盒式滤波器(Boxfilter)对图像的滤波转化成计算图像上不同区域间像素和的加减运算问题,只需要简单几次查找积分图就可以完成。
每个像素的Hessian矩阵行列式的近似值:
在Dxy上乘了一个加权系数0.9,目的是为了平衡因使用盒式滤波器近似所带来的误差:
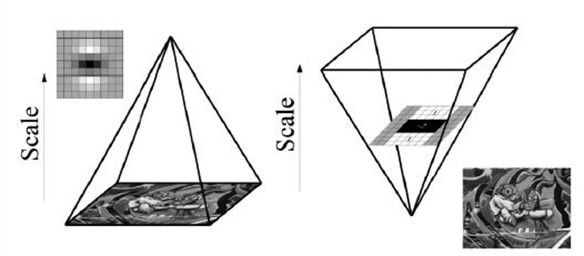
2. 构建尺度空间
同Sift一样,Surf的尺度空间也是由O组L层组成,不同的是,Sift中下一组图像的尺寸是上一组的一半,同一组间图像尺寸一样,但是所使用的高斯模糊系数逐渐增大;而在Surf中,不同组间图像的尺寸都是一致的,但不同组间使用的盒式滤波器的模板尺寸逐渐增大,同一组间不同层间使用相同尺寸的滤波器,但是滤波器的模糊系数逐渐增大。
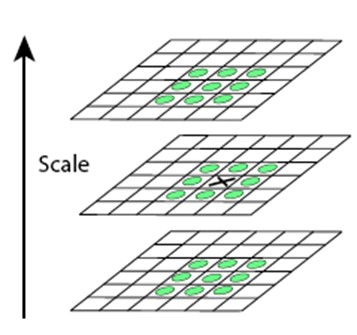
3. 特征点定位
特征点的定位过程Surf和Sift保持一致,将经过Hessian矩阵处理的每个像素点与二维图像空间和尺度空间邻域内的26个点进行比较,初步定位出关键点,再经过滤除能量比较弱的关键点以及错误定位的关键点,筛选出最终的稳定的特征点。
4. 特征点主方向分配
Sift特征点方向分配是采用在特征点邻域内统计其梯度直方图,而在Surf中,采用的是统计特征点圆形邻域内的harr小波特征。
在特征点的圆形邻域内,统计60度扇形内所有点的水平、垂直harr小波特征总和,然后扇形以一定间隔进行旋转并再次统计该区域内harr小波特征值之后,最后将值最大的那个扇形的方向作为该特征点的主方向。

5. 生成特征点描述子
在Sift中,是取特征点周围44个区域块,统计每小块内8个梯度方向,用着448=128维向量作为Sift特征的描述子。
Surf算法中,也是在特征点周围取一个44的矩形区域块,但是所取得矩形区域方向是沿着特征点的主方向。每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之后、垂直方向值之后、水平方向绝对值之后以及垂直方向绝对值之和4个方向。
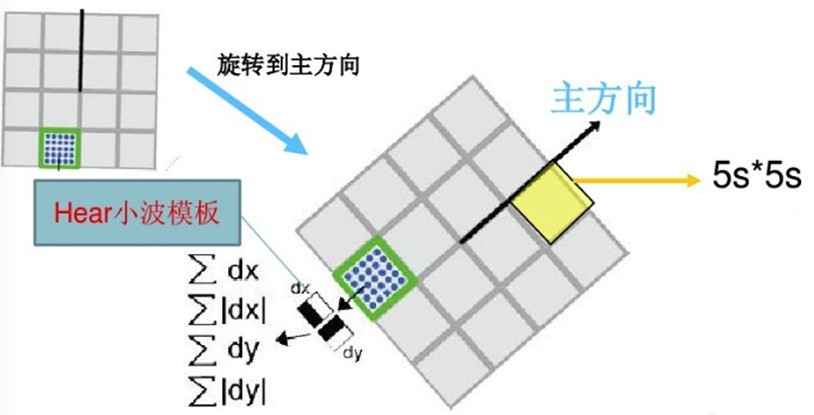
把这4个值作为每个子块区域的特征向量,所以一共有444=64维向量作为Surf特征的描述子,比Sift特征的描述子减少了一半。
6. 特征点匹配
与Sift特征点匹配类似,Surf也是通过计算两个特征点间的欧式距离来确定匹配度,欧氏距离越短,代表两个特征点的匹配度越好。
不同的是Surf还加入了Hessian矩阵迹的判断,如果两个特征点的矩阵迹正负号相同,代表这两个特征具有相同方向上的对比度变化,如果不同,说明这两个特征点的对比度变化方向是相反的,即使欧氏距离为0,也直接予以排除。
以上是关于SURF算法的主要内容,如果未能解决你的问题,请参考以下文章
OpenCV 例程 300篇242. 加速稳健特征检测算法(SURF)
OpenCV 例程 300篇242. 加速稳健特征检测算法(SURF)