SLAM学习笔记 - 世界坐标系到相机坐标系的变换
Posted tszs_song
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了SLAM学习笔记 - 世界坐标系到相机坐标系的变换相关的知识,希望对你有一定的参考价值。
参考自:
http://blog.csdn.net/yangdashi888/article/details/51356385
http://blog.csdn.net/li_007/article/details/5976261

其中,Zc表示单目相机的尺度不确定性(单目相机无法确定尺度,所以ORB-SLAM等最后都对单目做了sim3优化)
等号右边第一、二个矩阵经常乘在一起作为相机内参,其中dx、dy是像面上每个像素点在x轴y轴上的尺寸,u0和v0用来把图像坐标原点从图像中心挪到左上角,f表示焦距。
[R|T]也叫相机外参,是相机相对于世界坐标系的旋转和平移,其中三维旋转矩阵R不能做加法(如果相机先转过角度R1,再转过角度R2,那么相机一共旋转过的角度是R1xR2)
单应矩阵:
是二维到二维的变换矩阵,考虑了平移、旋转和仿射变换。
“比如,一个物体可以通过旋转相机镜头获取两张不同的照片(这两张照片的内容不一定要完全对应,部分对应即可),我们可以把单应性设为一个二维矩阵M,那么照片1乘以M就是照片2. ”
参考这里。以及,cs131 - lectrue9_10 stereo
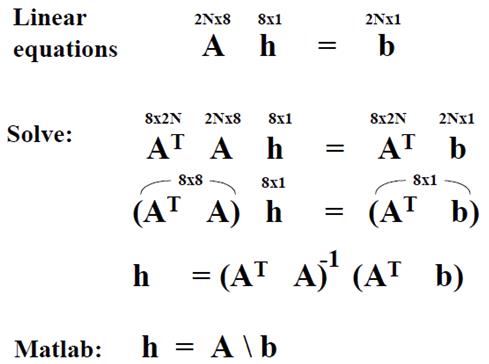
stm32里用的上一个式子,matlab里就是下面一个,时隔一年全忘了......
以上是关于SLAM学习笔记 - 世界坐标系到相机坐标系的变换的主要内容,如果未能解决你的问题,请参考以下文章