cuda编程-矩阵乘法
Posted BlueOceans
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了cuda编程-矩阵乘法相关的知识,希望对你有一定的参考价值。
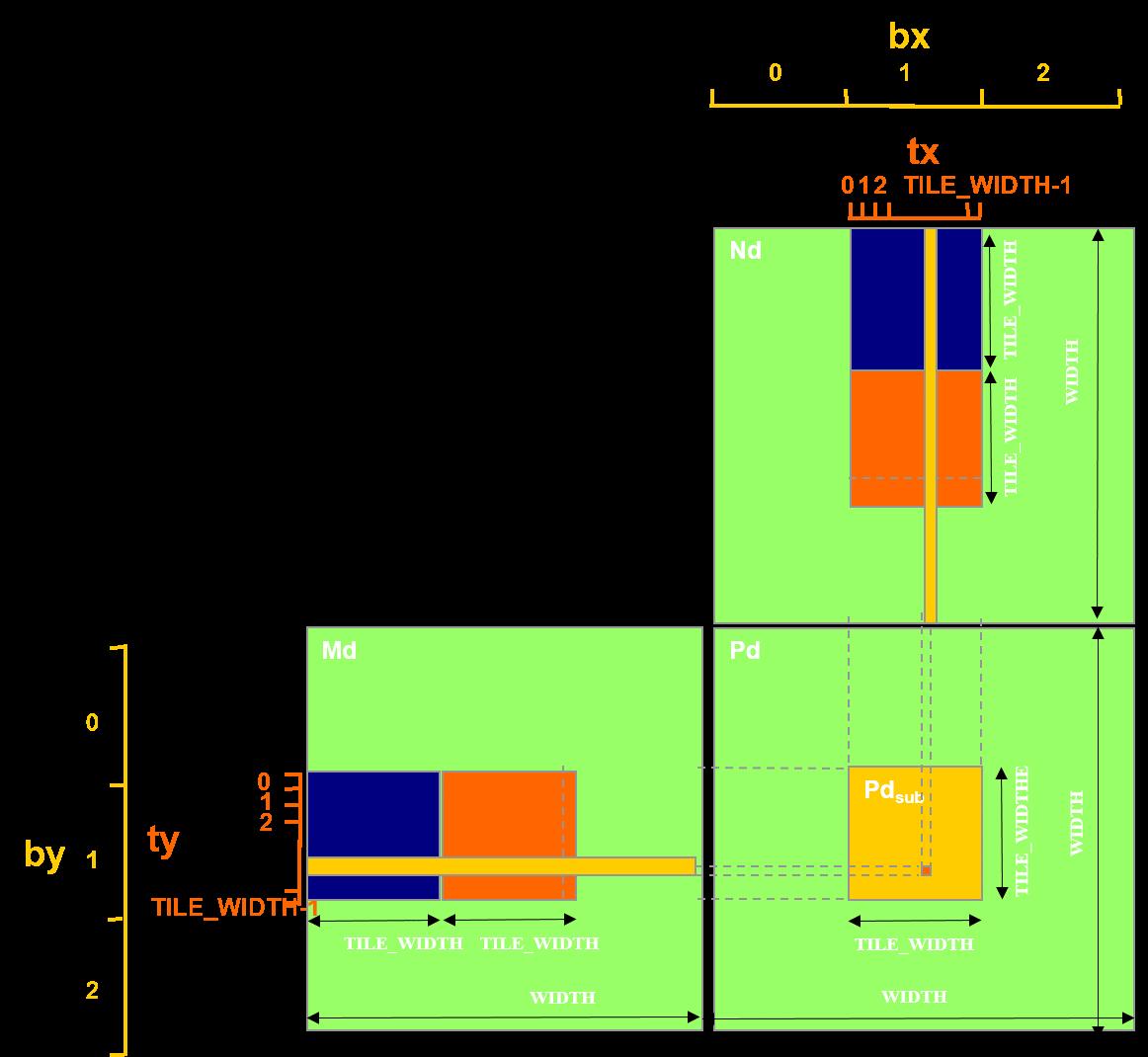
采用shared memory加速
代码
#include <stdio.h> #include <stdlib.h> #include <math.h> #include <algorithm> #include <cuda_runtime.h> #include <device_launch_parameters.h> #include "functions.h" #define TILE_SIZE 16 __global__ void matrixMulKernel(float *C, float *A, float *B, int width, int height){ __shared__ float tile_A[TILE_SIZE][TILE_SIZE]; __shared__ float tile_B[TILE_SIZE][TILE_SIZE]; unsigned int tx = threadIdx.x; unsigned int ty = threadIdx.y; unsigned int gx = blockIdx.x * TILE_SIZE + tx; unsigned int gy = blockIdx.y * TILE_SIZE + ty; if (gx >= width || gy >= height) return; // Load shared memory int tile_num = (width + TILE_SIZE - 1) / TILE_SIZE; float sum = 0; for (int i = 0; i < tile_num; ++i){ int bound = min(width, TILE_SIZE); for (int j = tx; j < bound; j += blockDim.x){ tile_A[ty][j] = A[gy * width + i * bound + j]; } for (int j = ty; j < bound; j += blockDim.y){ tile_B[j][tx] = B[(i * bound + j) * width + gx]; } //Synchronize to make sure the sub-matrices are loaded before starting the computation __syncthreads(); for (int j = 0; j < bound; ++j){ sum += tile_A[ty][j] * tile_B[j][tx]; } //Synchronize to make sure that the preceding computation is done before loading two new //sub-matrices of M and N in the next iteration __syncthreads(); } C[gy*width + gx] = sum; } void constantInit(float *data, int size, float val){ for (int i = 0; i < size; ++i){ data[i] = val; } } void matrixMul(){ int dev_id = 0; cudaSetDevice(dev_id); // Allocate host memory for matrices A and B int width = 128; int height = 128; unsigned int size = width * height; unsigned int mem_size = sizeof(float)* size; float *h_A = (float *)malloc(mem_size); float *h_B = (float *)malloc(mem_size); float *h_C = (float *)malloc(mem_size); // Initialize host memory const float valB = 0.01f; constantInit(h_A, size, 1.0f); constantInit(h_B, size, valB); // Allocate device memory float *d_A, *d_B, *d_C; cudaMalloc((void **)&d_A, mem_size); cudaMalloc((void **)&d_B, mem_size); cudaMalloc((void **)&d_C, mem_size); // Memcpy cudaMemcpy(d_A, h_A, mem_size, cudaMemcpyHostToDevice); cudaMemcpy(d_B, h_B, mem_size, cudaMemcpyHostToDevice); // Config dim dim3 block(TILE_SIZE, TILE_SIZE); dim3 grid((width + block.x - 1) / block.x, (height + block.y - 1) / block.y); matrixMulKernel <<<grid, block >>>(d_C, d_A, d_B, width, height); // Memcpy device to host cudaMemcpy(h_C, d_C, mem_size, cudaMemcpyDeviceToHost); // Check printf("Checking computed result for correctness: "); bool correct = true; // test relative error by the formula // |<x, y>_cpu - <x,y>_gpu|/<|x|, |y|> < eps double eps = 1.e-6; // machine zero for (int i = 0; i < (int)(width * height); i++) { double abs_err = fabs(h_C[i] - (width * valB)); double dot_length = width; double abs_val = fabs(h_C[i]); double rel_err = abs_err / abs_val / dot_length; if (abs_err > eps) { printf("Error! Matrix[%05d]=%.8f, ref=%.8f error term is > %E\\n", i, h_C[i], (float)(width*height), eps); correct = false; } } printf("%s\\n", correct ? "Result = PASS" : "Result = FAIL"); }
合并访存:tile_A按行存储,tile_B按列存储,sum=row_tile_A * row_tile_B
__global__ void matrixMulKernel(float *C, float *A, float *B, int width, int height){ __shared__ float tile_A[TILE_SIZE][TILE_SIZE]; __shared__ float tile_B[TILE_SIZE][TILE_SIZE]; unsigned int tx = threadIdx.x; unsigned int ty = threadIdx.y; unsigned int gx = blockIdx.x * TILE_SIZE + tx; unsigned int gy = blockIdx.y * TILE_SIZE + ty; if (gx >= width || gy >= height) return; // Load shared memory int tile_num = (width + TILE_SIZE - 1) / TILE_SIZE; float sum = 0; for (int i = 0; i < tile_num; ++i){ tile_A[tx][ty] = A[gy * width + i * TILE_SIZE + tx]; tile_B[ty][tx] = B[(i * TILE_SIZE + ty) * width + gx]; //Synchronize to make sure the sub-matrices are loaded before starting the computation __syncthreads(); for (int j = 0; j < TILE_SIZE; ++j){ sum += tile_A[j][ty] * tile_B[j][tx]; } //Synchronize to make sure that the preceding computation is done before loading two new //sub-matrices of M and N in the next iteration __syncthreads(); } C[gy*width + gx] = sum; }
以上是关于cuda编程-矩阵乘法的主要内容,如果未能解决你的问题,请参考以下文章