增强学习笔记 第十章 On-Policy控制的近似
Posted 米老虎M
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了增强学习笔记 第十章 On-Policy控制的近似相关的知识,希望对你有一定的参考价值。
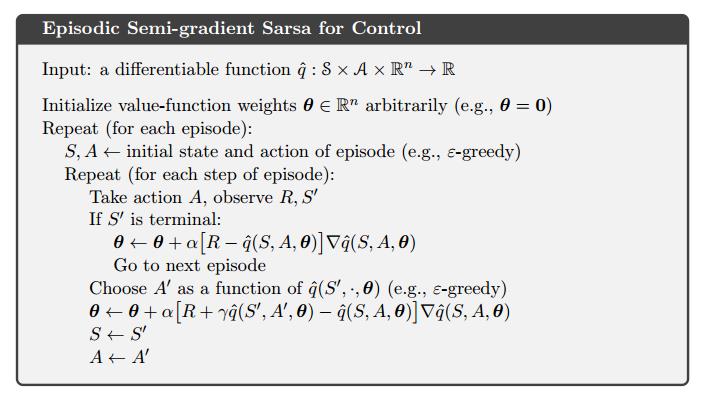
10.1 片段性任务的半梯度控制
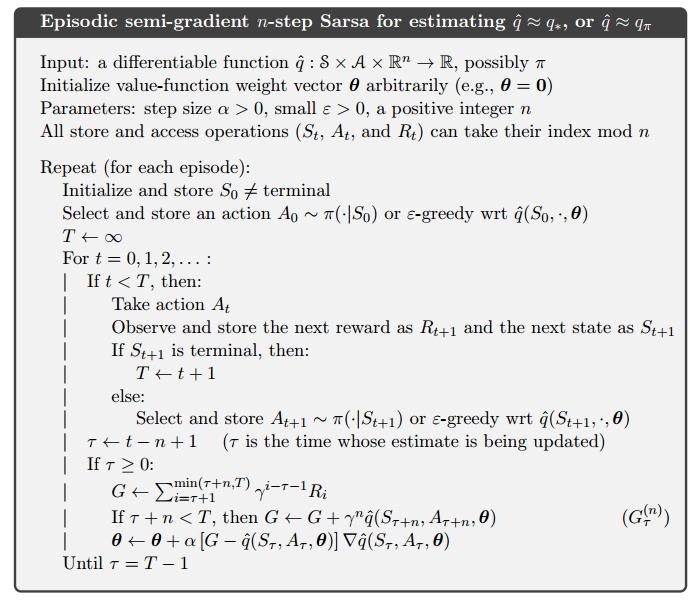
10.2 n步Sarsa控制
10.3 平均奖励:连续任务的新设定
定义一个策略的优劣函数:依照该策略执行的平均奖励

其中 和起始状态无关,称为各态遍历性。早期任何决策的影响都是暂时性的,长期的平均收益仅仅取决于策略本身和环境的转移概率
和起始状态无关,称为各态遍历性。早期任何决策的影响都是暂时性的,长期的平均收益仅仅取决于策略本身和环境的转移概率
$\\eta$函数用来评估一个策略的优劣已经足够。获得最大$\\eta$函数的策略称为最优策略。
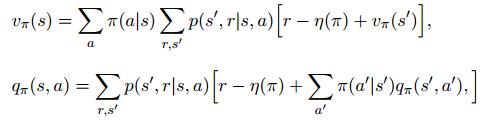
在平均奖励的设定下,回报被定义为奖励和平均奖励的差
![]()
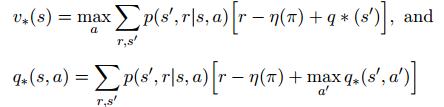
Bellman方程也可以写为:
TD误差可以写为:

迭代式为:


10.4 折扣设定的废弃
在折扣设定下,平均奖励为: 因此折扣设定已经没有必要
因此折扣设定已经没有必要
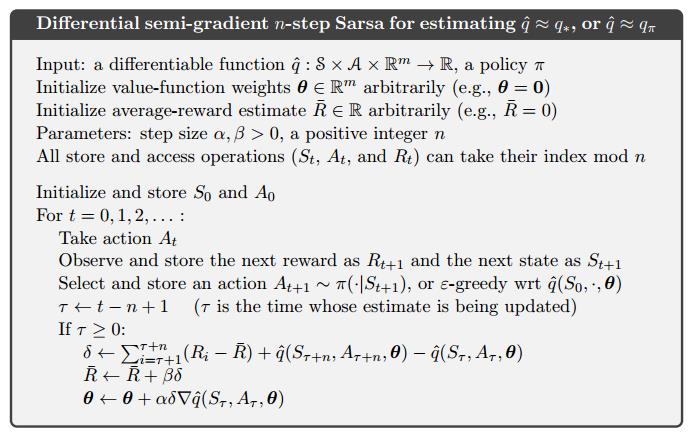
10.5 n步差分半梯度Sarsa
回报:
![]()
TD误差:
![]()
以上是关于增强学习笔记 第十章 On-Policy控制的近似的主要内容,如果未能解决你的问题,请参考以下文章