卡尔曼滤波算法--核心公式推导导论 - ZZ
Posted 莫水千流
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了卡尔曼滤波算法--核心公式推导导论 - ZZ相关的知识,希望对你有一定的参考价值。
卡尔曼滤波算法--核心公式推导导论
写在最前面:这是我第一篇专栏文章,感谢知乎提供这么一个平台,让自己能和大家分享知识。本人会不定期的开始更新文章,文章的内容应该集中在汽车动力学控制,整车软件架构,控制器等方面。作为一名在校硕士,很多理解都可能不全面,不正确,大家有不同意见欢迎讨论。 谢谢!
---------------------------------------------------------------------------------------------------------------------------
卡尔曼滤波算法的应用很广泛,省略很多字。
卡尔曼滤波算法的优点很多,省略很多字。
卡尔曼滤波算法很牛逼,因为有一堆公式,有一堆符号,看起来就很牛逼啊,乍一看不懂的都很牛逼啊!
本文针对卡尔曼滤波算法的核心公式进行推导,不让大家被它华丽的外表吓到。(之后计划写关于针对非线性情况的EKF和UKF,对卡尔曼滤波算法做一个全面一点的应用介绍。感兴趣的可以关注专栏。)
--------------------------------------------------------------------------------------------------------------------------
Okay,进入正题。这篇文章假设读者已经对卡尔曼滤波算法有初步的了解,知道它能做什么,知道它的优点,知道它很牛逼,并且你已经对它产生兴趣,但不知道如何下手。
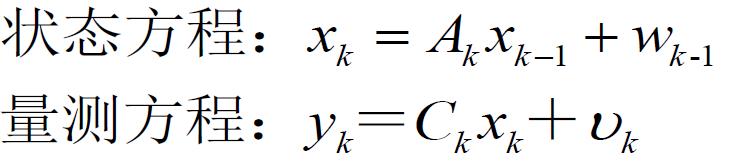
首先给出一个控制理论中公式,别急着翻控制理论的书,没那么复杂:
 两个基本问题:
两个基本问题:
1.卡尔曼滤波算法要做什么?
对状态进行估计。
2. 卡尔曼滤波算法怎么对状态进行估计?
利用状态过程噪声和测量噪声对状态进行估计。
一个状态在一个时刻点k的状态进入下一个时刻点k+1状态,会有很多外界因素的干扰,我们把干扰就叫做过程噪声,(这个词一看就是硬翻译过来的,别在意为什么叫噪声)用w表示。任何一个测量仪器,都会有误差,我们把这个误差叫做量测噪声,用v表示。
回到上面那个公式,状态方程表示状态在不断的更新,从一个时刻点进入下一个时刻点,这个很好理解。关键是量测方程,它表示,我们不断更新的状态有几个能用测量仪器测出来,比如,汽车运动状态参数有很多,比如速度,轮速,滑移率等,但是我们只能测量出轮速,因此量测方程要做的就是把状态参数中能量测的状态拿出来。
我们始终要记得我们要做的事:我们要得到的是优化的状态量Xk。
理解了上面之后就可以开始推导公式了。
1.首先不考虑过程噪声对状态进行更新,很简单:
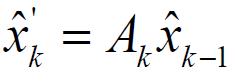 举个例子,v(k)=v(k-1)+at,匀加速运动咯。
举个例子,v(k)=v(k-1)+at,匀加速运动咯。
2.不考虑测量噪声取出能测量的状态,也很简单:
 3.用测量仪器测量出来的状态值(大家可以考虑到:测量的值就是被各种噪声干扰后的真实值)减去上面不考虑噪声得到的测量值:
3.用测量仪器测量出来的状态值(大家可以考虑到:测量的值就是被各种噪声干扰后的真实值)减去上面不考虑噪声得到的测量值:
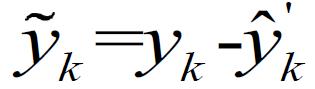 这个值在数学上是一个定义值,叫做新息,有很多有趣的性质,感兴趣的可以自己谷歌。
这个值在数学上是一个定义值,叫做新息,有很多有趣的性质,感兴趣的可以自己谷歌。
我们对步骤暂且停一停。这个叫新息的值有什么用?由上面的过程我们可以明显看到,它反映了过程噪声和测量噪声综合对测量状态值的影响,也就是它包含了w和v的情况。
回到数学层面,(不要害怕,很简单的数学应用和思考啦!)一个数值c由两部分内容a和b组成,那么怎样用数学表达式来表达?
一般有两种做法:
I.直接相加:c=a+b;
II. 用比例的方法:a=n*c,b=(1-n)*c
卡尔曼采用了方法II,用比例的方法来做(其实这也是为什么叫做滤波的原因,因为滤波就是给权值之类的操作)。也就是说,过程噪声w=新息*一个比例。这样得到的过程噪声加上原来(第一步)不考虑过程噪声的状态值不就是优化值了吗? 也就是:
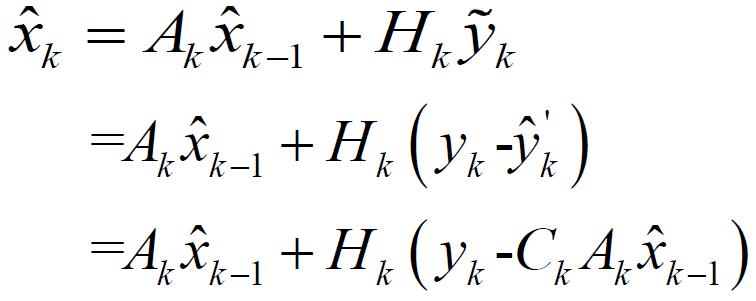 Okay,都写到这里了,有必要做一下前提假设:
Okay,都写到这里了,有必要做一下前提假设:
a. 什么高斯噪声,均值为零一堆;
b.Ak,Ck,wk的协方差Q,vk的协方差R,系统协方差初始值P0,状态初始值X0,都已知。为什么已知,你实际做项目就知道了。不过不懂的可以留言或者私信。
那么到目前为止我们的思路就是清楚了,找到一个合适的Hk值(卡尔曼增益),那么我们就能得到状态的最优值。(卡尔曼说的,不是我说的,所以你问为什么,你要问他,这么深层次的理论留给博士和学者们去做就好,我们就现学现用就行,哈哈哈,站在巨人的肩膀!)
问题来了:怎么得到合适的Hk?似乎不是随便一个参数。
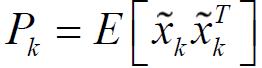 这是误差协方差矩阵。
这是误差协方差矩阵。
思路:使得误差协方差矩阵Pk最小的Hk。
为什么?这里我从感观的角度说明自己的理解,欢迎讨论。
协方差表示什么,协方差表示两者之间的联系或者关系,关系越大,协方差越大。误差协方差越小说明过程噪声和量测噪声的关系越小。关系越小能做什么,这要回到我们第3步讨论的我们用比例的方法分开了w和v。用比例分开,到底多少属于w,多少是v,如果关系越小,分开的越精确,比如一堆白砂糖和盐,如果两种混合的很均匀,我们说它关系很大,也就越难用比例的方法将其分开。
4.求的误差协方差矩阵Pk
自然是把里面的Xk先得到,然后公式运算,通过上面的步骤我们也容易得到:
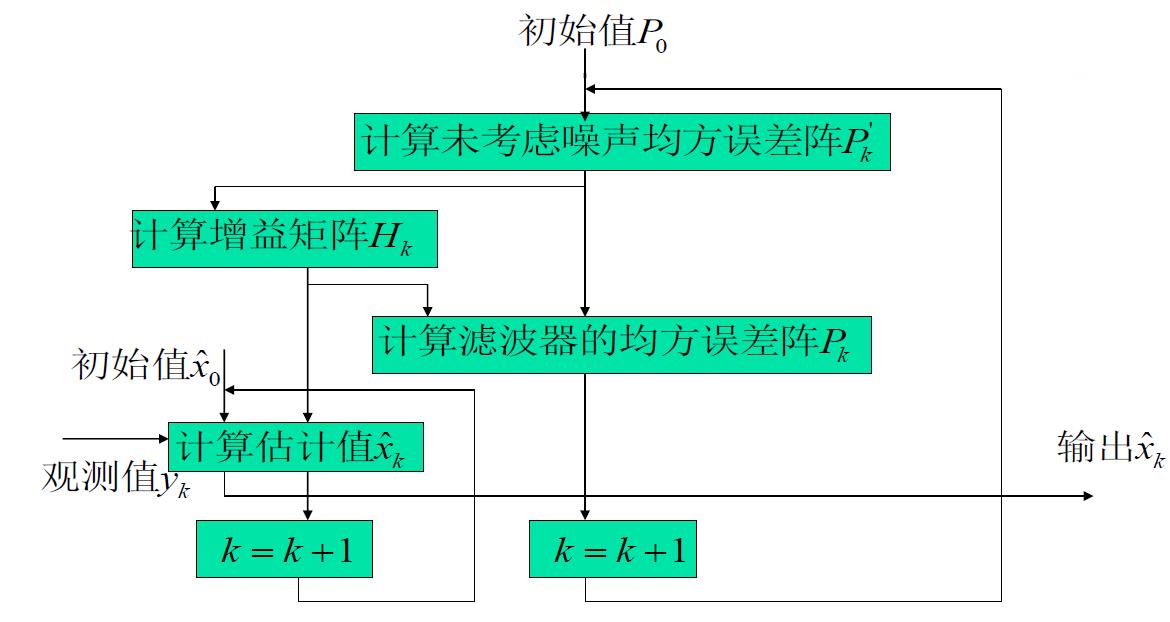
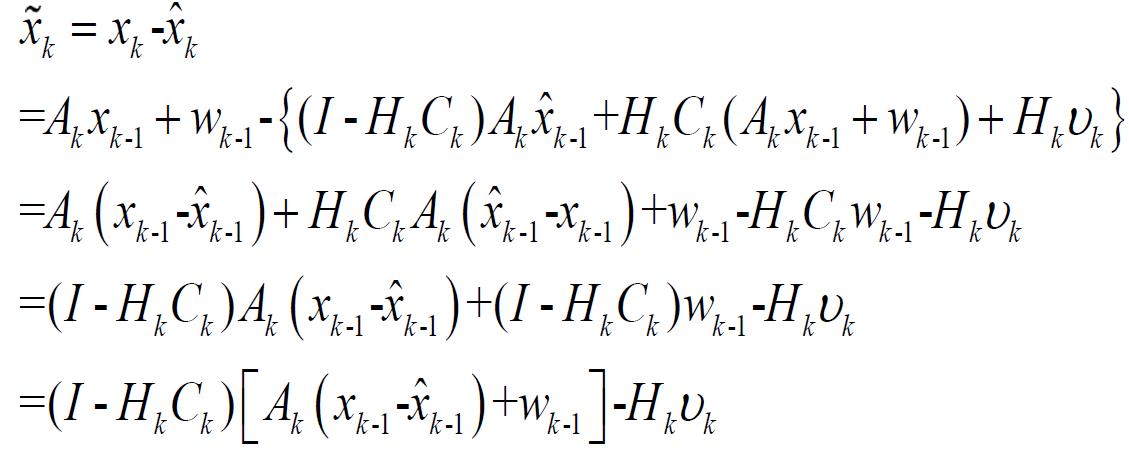 然后复杂的数学计算,和之前假设的高斯噪声,新息的性质之类(至于过程,个人觉得你如果只做应用,不研究算法,就没必要深入去看了),就能得到下面的卡尔曼滤波递推公式:
然后复杂的数学计算,和之前假设的高斯噪声,新息的性质之类(至于过程,个人觉得你如果只做应用,不研究算法,就没必要深入去看了),就能得到下面的卡尔曼滤波递推公式:
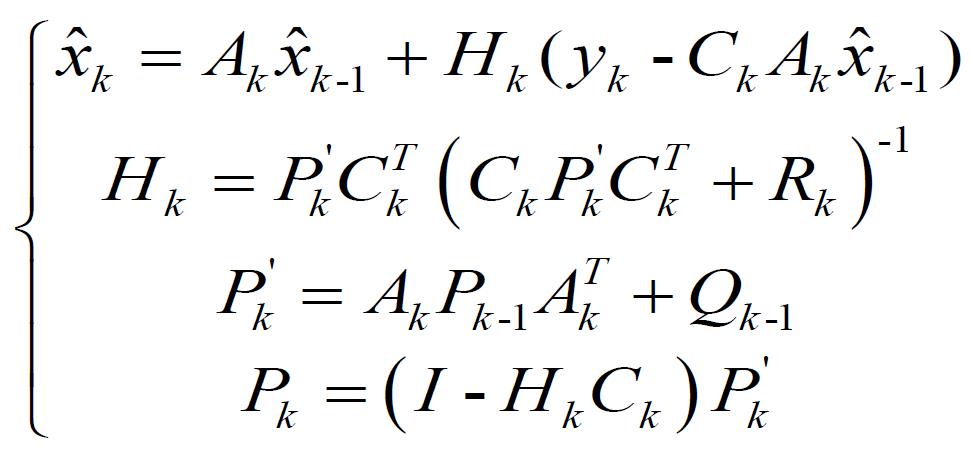 通过上面的解释,我们也就不难知道这些公式都在干嘛,知道干嘛就可以了。在知道A,C,P0,Q,R的情况下,整个公式的运算流程也都很清晰了。
通过上面的解释,我们也就不难知道这些公式都在干嘛,知道干嘛就可以了。在知道A,C,P0,Q,R的情况下,整个公式的运算流程也都很清晰了。
————————————————————————————————————————
欢迎评论!转载请注明出处!谢谢大家!
以上是关于卡尔曼滤波算法--核心公式推导导论 - ZZ的主要内容,如果未能解决你的问题,请参考以下文章