实时控制软件第二次作业
Posted Wall-e巛
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了实时控制软件第二次作业相关的知识,希望对你有一定的参考价值。
0. Fork例程到自己的GitHub账号 :
:
开发环境搭建
1. QEMU安装
建议使用qemu-system-gnuarmeclipse,该qemu分支对stm32f4有更好的支持,主要面向Eclipse开发环境。
-
到网页 https://github.com/gnu-mcu-eclipse/qemu/releases/tag/gae-2.8.0-20161227 下载二进制文件 gnuarmeclipse-qemu-debian64-2.8.0-201612271623-dev.tgz到~/work目录
-
在工作目录解压缩文件,并把路径添加到$PATH变量中
#cd ~/work
#tar xvf gnuarmeclipse-qemu-debian64-2.8.0-201612271623-dev.tgz
#chmod -R -w ./qemu
export PATH=~/work/qemu/2.8.0-201612271623-dev/bin/:$PATH
- 测试qemu能否正常运行
#qemu-system-gnuarmeclipse --version


显示版本信息为2.8.0,正常。
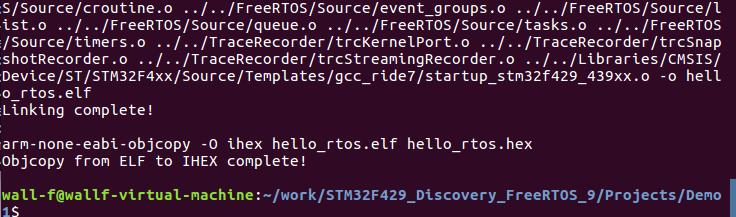
2. 编译例程
- 在/Projects/Demo1目录下运行make,生成hello_rtos.elf文件
说明:qemu-system-gnuarmeclipse当前版本不支持STM32F4的浮点,相应的,FreeRTOS使用的portable目录没有使用ARM_CM4F而是使用ARM_CM3。
3. QEMU仿真
在Demo1目录下运行脚本文件:
#./qemu.sh
4. GDB调试
在/Projects/Demo1目录下运行qemu_gdb脚本文件,该文件中添加了--gdb tcp::1234 -S
qemu启动后等待来自gdb的调试指令,打开另外一个终端窗口,运行
#arm-none-eabi-gdb

在gdb界面内运行:
(gdb)target remote localhost:1234
(gdb)continue

5. 编程作业具体要求:
- 创建三个任务:Sender_Task,Receiver_Task, Monitor_Task
- Sender_Task的任务执行周期为2ms,Receiver_Task的任务执行周期为1000ms, Monitor_Task的任务执行周期为10000ms。
- Sender_Task在每个执行周期向Receiver_Task发送一个32位无符号整数,第一次发送1,然后依次发送2,3,4......,发送完10000后再从1开始发送。同时对发送的数据进行计算累加计算并保存当前累加结果。
- Receiver_Task对接收到的数据进行和Sender_Task同样的累加计算并保存当前累加结果。
- Monitor_Task在每个执行周期检查Sender_Task发送的每个数据是否都被Receiver_Task正确的接收和处理,请自行设计一种检查机制并实现。
- 可利用STM32F429I Discovery开发板的相关硬件(LED/LCD/串口)来输出相关状态信息。
- 使用FreeRTOS的任务间通信和同步API完成上述功能。
1.main函数
int main(void)
{
MsgQueue=xQueueCreate(30000,sizeof(uint32_t));
xTaskCreate(
Sender_Task,
"Sender_Task",
configMINIMAL_STACK_SIZE,
(void*) NULL,
tskIDLE_PRIORITY+4UL,
NULL
);
xTaskCreate(
Receiver_Task,
"Receiver_Task",
configMINIMAL_STACK_SIZE,
(void*) NULL,
tskIDLE_PRIORITY+3UL,
NULL
);
xTaskCreate(
Monitor_Task,
"Monitor_Task",
configMINIMAL_STACK_SIZE,
(void*) NULL,
tskIDLE_PRIORITY+2UL,
NULL
);
vTaskStartScheduler();
for( ;; );2.Sender_Task
void Sender_Task(void *pvParameters)
{
uint32_t Sendnum=1;
while(1)
{
xQueueSend(MsgQueue,(void* )&Sendnum,0);
Sendsum=Sendsum+Sendnum;
Sendnum++;
if(Sendnum==10000)
{
uint32_t Sendnum=1;
}
vTaskDelay(2);
}
}3.Receiver_Task
void Receiver_Task(void *pvParameters)
{
uint32_t Receivernum=0;
while(1)
{
while(xQueueReceive(MsgQueue,&Receivernum,
0/portTICK_RATE_MS) == pdTRUE)
{
Receiversum=Receiversum+Receivernum;
}
vTaskDelay(1000);
}
}4.Monitor_Task
void Monitor_Task(void)
{
while(1)
{
if(Receiversum == Sendsum)
{
Green_LED_On();
vTaskDelay(1000/ portTICK_RATE_MS);
Green_LED_Off();
}
else
{
Red_LED_On();
vTaskDelay(1000/ portTICK_RATE_MS);
Red_LED_Off();
}
vTaskDelay(10000);
}
}
以上是关于实时控制软件第二次作业的主要内容,如果未能解决你的问题,请参考以下文章