MRDS学习四——自动型机器车
Posted Sheldon_wz
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了MRDS学习四——自动型机器车相关的知识,希望对你有一定的参考价值。
由自己的所在开始,探索自己周围的简单机器车,假设车子的行走路径如下:
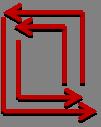
我们要把L型路径写成一个Activity,然后由外部输入这个L的大小,最后这个Activity要能够在完成行走路径时吐出更大的L大小。
完成第一步前进动作:
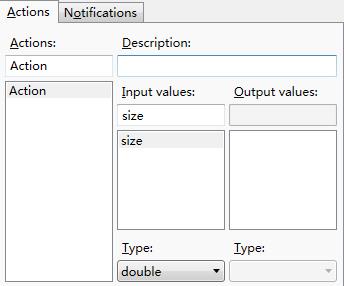
第一步:拖动一个Activity,改名为RunL,然后把输入定为size,类别为double。而输出是Notification。(因为机器完成时都是使用通知来告诉我们,而我们L型路径的完成也是靠通知才知道)
如何写里面的流程:根据Generic Differential Drive可以接受的指令,只有前进一段距离以及旋转一个角度,所以L型路径应该由1、前进 2、旋转90度 3、前进、4、旋转90度(为下一次的L)四部分来组成。而每一部分的完成都是靠通知来实现,并不是靠当下Generic Differential Drive的输出。所以,当我们收到通知时,有必要知道我们目前处于哪个状态,而决定应该如何进行下一个步骤。这个在离散数学就算是有限状态机(Finite State Machine),在VPL处理FSM问题只能靠变量(Variables)。
除了1、前进是靠外部输入驱动以外,2、3、4都是靠Generic Differential Drive完成通知的,
然后我们靠一个CurrentState的变量来决定我们该进行哪一个动作:
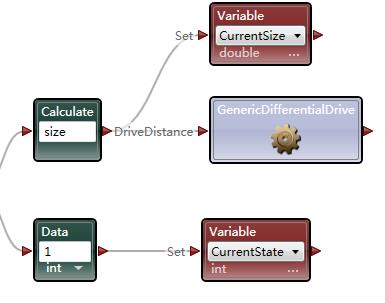
第二步:从Basic Activity中拖动一个Variable到RunL里面(不是Diagram中)。右边的属性表里可以新增变量,我们新增一个CurrentState,类别是int,如下:

第三步:再输入资料时就把一个Data值为1作为该变量的SetValue。
第四步:再把输入size输入给Generic Differential Drive(配置参考学习二)的DriveDistance设定如下:(以百分之一百的速度前进value这样的距离)
第五步:由于等一下还须知道使用者输入的size,所以也顺便把size存储为CurrentSize。现
在RunL的内容应该如下:
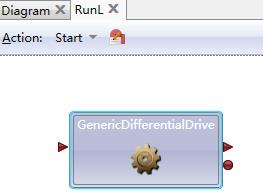
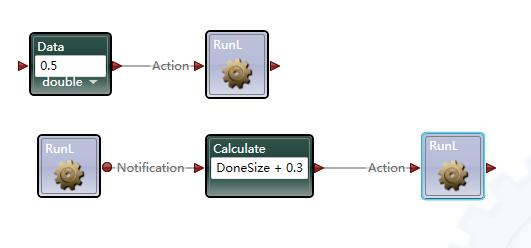
第六步:在Diagram输入一个0.5的值(value)给RunL的size,如下:

(运行起来,机器车可以自动走一小段直线并停止。)
完成接下来的二、三、四步动作:
对于每一个使用者自定义的Activity,都有一个特定的称为“Start”的Activity,它是用来作为通知或者是启动等流程进行编写。在Start里面的流程都没有输出以及输入,但里面的元件可以有Notification。
第一步:为了收到Generic Differential Drive(配置参考学习二)的通知,我们把Generic Differential Drive放到Start里面。如下:
第二步:接下来,我们打算只收到两种通知,分别是前进(DriveDistance)以及旋转(RotationDegrees),所以放两个If来判断这两个通知,然后将这两个If的判断交给Merge,输出给一个Calculate,填入state.CurrentState+1,再把这个Calculate的结果交给CurrentState变量。如下图所示:
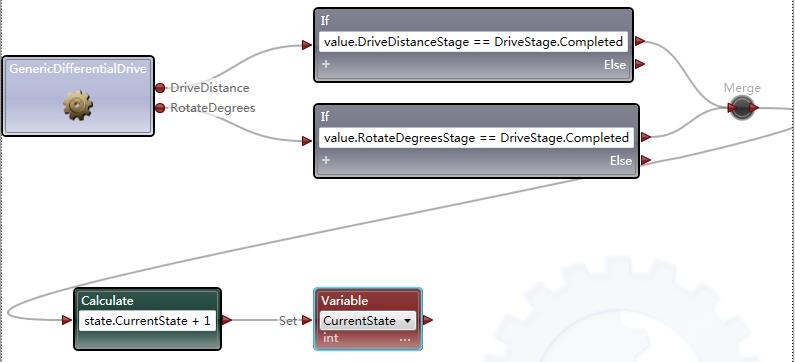
这样我们就完成了“收到通知以后,状态+1”的事情。
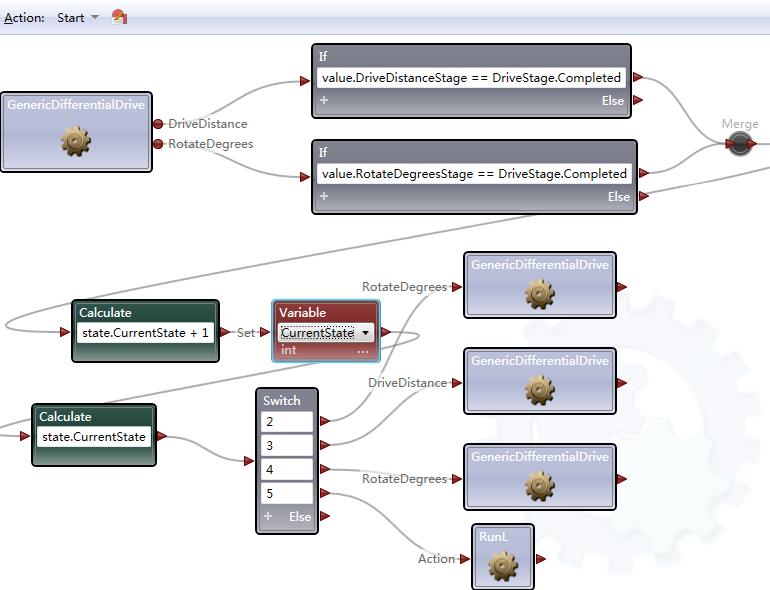
第三步:“状态+1”以后,根据目前的状态决定该做什么事:设完变量以后,在交给另一个Calculate,填入state.CurrentState。再加上switch判断:
2交给Generic Differential Drive一个全力(power=1)旋转90度(Degrees=90)
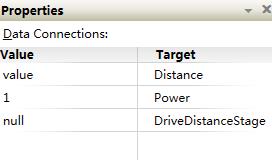
3交给Generic Differential Drive一个全力(power=1)前进(Distance=state.CurrentSize)
4交给Generic Differential Drive一个全力(power=1)旋转90度(Degrees=90)
5交给RunL(建议去Diagram)一个size=-1的值,作为结束
如下图所示:
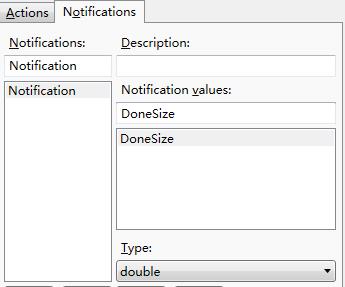
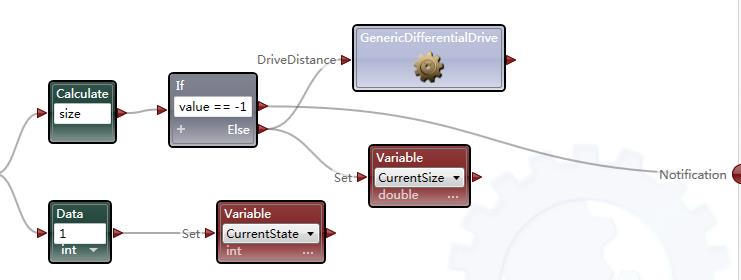
第三步:因为设定了size=-1为完成,所以要去Action那头多做一个判断,size=-1时就发出一个通知,如下图所示:
第四步:最后,回到Diagram,设定RunL的通知,再透过Calculate将DoneSize+0.3再交给RunL,如下图所示:
第四步:保存并运行。

(遇到了很多困难,不过都克服了,但是每次保存变量的值都保存不上 ,解决的方法只是一次设定一次运行,知道如何解决的朋友可以告诉我。)
,解决的方法只是一次设定一次运行,知道如何解决的朋友可以告诉我。)

2016-03-29
(资料整理于百度文库的《Microsoft_Robotics_Developer_Studio中文教程》)
以上是关于MRDS学习四——自动型机器车的主要内容,如果未能解决你的问题,请参考以下文章