深入理解计算机系统(3.3)------操作数指示符和数据传送指令
Posted YSOcean
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了深入理解计算机系统(3.3)------操作数指示符和数据传送指令相关的知识,希望对你有一定的参考价值。
在上一篇博客 程序编码以及数据格式 中我们给出了一个简单的C程序,然后编译成了汇编代码。大家看不懂没关系,后面的博客我们将逐渐揭开一些汇编指令的神秘面纱。本篇博客我们将对操作数指示符和数据传送指令进行详细的介绍。
1、整数寄存器
上一篇博客我们讲了在汇编语言中,如下的几个处理器状态是可见的:
一、程序计数器(在 IA32 中通常称为 PC,用 %eip 表示):指示将要执行的下一条指令在存储器中的地址。
二、整数寄存器文件:包含8个命名的位置,可以存储一些地址或者整数的数据。有的用来记录某些重要的程序状态,有的则用来保存临时数据。
三、条件码寄存器:保存最近执行的算数或逻辑指令的状态信息,它们用来实现控制或数据流中的条件变化,比如用来实现 if 和 while 语句。
四、浮点寄存器:存储浮点数。
这里我们要讲的就是第三个整数寄存器,在 32 位 CPU 中包含一组 8 个存储 32 位值的寄存器。这些寄存器用来存储整数数据或指针。下图是 IA32 的整数寄存器:
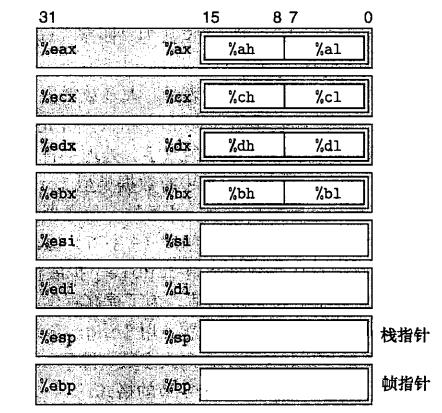
上述八个寄存器主要功能如下:
%eax,可存放一般数据,而且可作为累加器使用; %ebx,可存放一般数据,而且可用来存放数据的指针(偏移地址); %ecx,可存放一般数据,而且可用来做计数器,常常将循环次数用它来存放; %edx,可存放一般数据,而且可用来存放乘法运算产生的部分积,或用来存放输入输出的端口地址(指针); %esi,可存放一般数据,还可用于串操作中,存放源地址,对一串数据访问; %edi,可存放一般数据,还可用于串操作中,存放目的地址,对一串数据访问; %esp,用于寻址一个称为堆栈的存储区,通过它来访问堆栈数据; %ebp,可存放一般数据,用来存放访问堆栈段的一个数据区,作为基地址;
在大多数情况下,%eax、%ecx、%edx、%ebx、%esi、%edi等6个寄存器可以看做通用寄存器,对它们的使用没有限制;%esp、%ebp两个寄存器保存着指向程序栈中重要位置的指针,只有根据栈管理的标准惯例才能修改这两个寄存器中的值。
这8个寄存器都可以作为16位(字)或32位(双字)来访问。字节操作指令可以独立的读或者写%eax、%ecx、%edx、%ebx等4个寄存器的2个低位字节,因为%ax、%cx、%dx、%bx这4个16位寄存器又可分别分成ah,al ;bh,bl;ch,cl;dh,dl的8位寄存器。
这里大家也只需要有个眼熟就好了,后面我们将对这个8个寄存器进行详细讲解。
2、操作数指示符
我们知道大多数指令都有一个或多个操作数(operand),指示出执行一个操作中要引用的源数据值,以及放置结果的目标位置。下图是 IA32 支持的多种操作数格式:
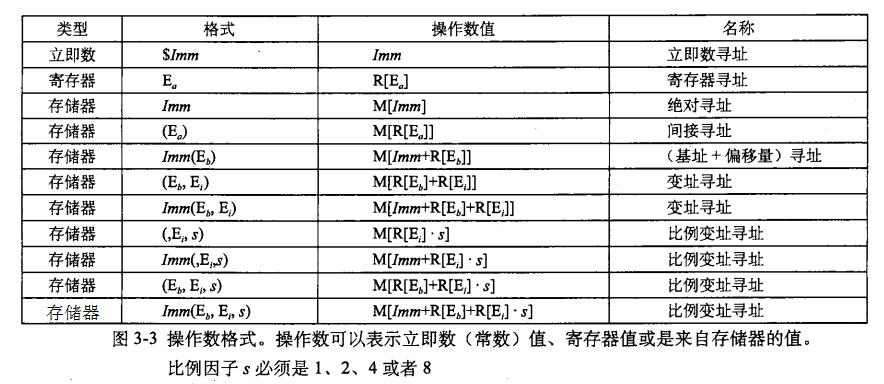
上图我们可以看出源数据值可以是常数形式给出,或者是从寄存器或存储器中读出。而结果可以存放在寄存器或存储器中。我们将不同的操作数分为如下三种类型:
①、立即数(immediate):书写方式是$符号后跟一个标准C表示的整数,比如$52,$0x1F等等。任何能放进一个32位的字里面的数值都可以做立即数。
②、寄存器(register):它表示某个寄存器的内容,可以是8个32位寄存器中的一个(比如%eax),也可以是8个16位寄存器中的一个(比如%ax),还可以是8个单字节寄存器寄存器(比如%al)。上图是用Ea来表示任意寄存器a,用引用 R[Ea]来表示它的值。
③、存储器(memory):它会根据计算出来的地址(通常称为有效地址)来访问某个存储器位置。我们将存储器看成一个很大的字节数组,用符号Mb[Addr] 表示对存储在存储器中从地址 Addr 开始的 b 个字节值的引用。上图省略了下方的 b.
从上图我们知道,第一行是立即数,第二行则是寄存器,剩下的全部是存储器。其中最后一行存储器语法 Imm(Eb,Ei,s),表示的是最常用的形式,分为四个部分,
一、Imm 是立即偏移数
二、Eb 是基址寄存器
三、Ei 是变址寄存器
四、s 是比例因子,必须是 1、2、4或8
然后有效地址计算公式为: Imm + R[Eb]+R[Ei]*s。比如对于2(%esp,%eax,4)这个操作数来讲,它代表的是内存地址为2+%esp+4*%eax的存储器区域的值。
3、数据传送指令
数据传送指令:将数据从一个位置复制到另一个位置的指令。简单来说就是复制指令。
将源操作数的值复制到目的操作数中并覆盖。源操作数指定的值是一个立即数,存储在寄存器或存储器中。目的操作数指定一个位置,要么是一个寄存器,要么是一个存储器地址。在 IA32 中还有一条限制,传送指令的两个操作数不能都执行存储器位置。
将一个值从一个存储器位置复制到另一个存储器位置需要两条指令:(就和宋丹丹把大象送进冰箱的步骤一样)
①、第一条指令将源值加载到寄存器中
②、第二条指令将该寄存器值写入到目的位置。
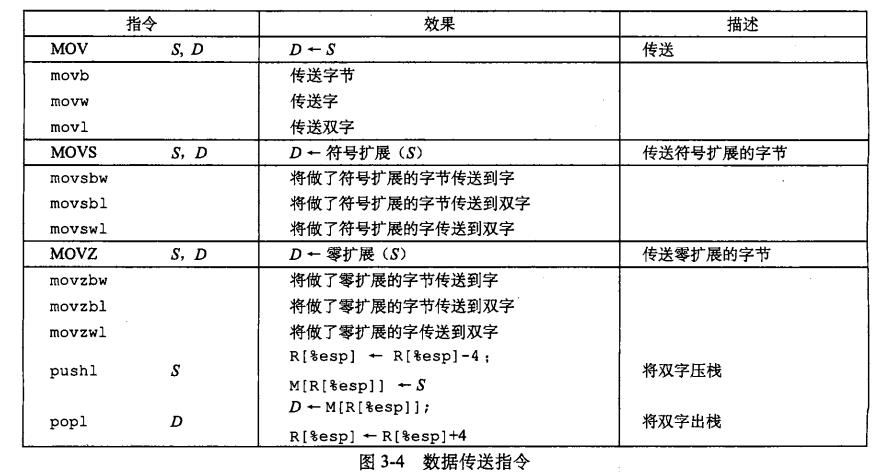
下图是许多不同的指令类:
4、MOV 指令
MOV 类由三条指令组成:movb,movw和 movl。指令格式为 [movx S D],表示将源操作数S中的数据复制到目的操作数D中。三种指令的区别是它们分别是在大小为 1,2和4个字节的数据上进行操作。
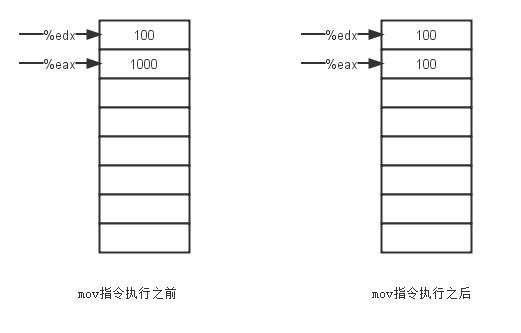
这里举一个简单的例子,比如我们有一条指令为movl %edx %eax。那么它的执行过程就如下图所示。
上图引用至:http://www.cnblogs.com/zuoxiaolong/p/computer15.html
在指令执行之后,%edx寄存器当中的内容会被复制到%eax寄存器。数据格式则为四个字节,也就是双字。我们还可以使用movb和movw去复制一个字节或者两个字节。
5、MOVS指令
MOVS指令格式为 [movsxy S D],其中x、y为数据格式,S为源操作数,D为目的操作数。x、y的组合有三种,分别是bw,bl,wl,分别表示字节(8位)传送到字(16位),字节(16位)传送到双字(32位),字(16位)传送到双字(32位)。
将较小的源数据复制到一个较大的数据位置。高位用符号位扩展,即目的位置的所有高位用源值的最高位数值进行填充。
比如对于指令movswl %dx %eax来讲,它的作用如下图所示。
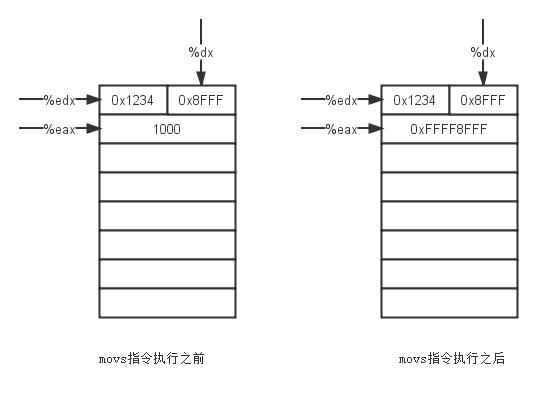
上图引用至:http://www.cnblogs.com/zuoxiaolong/p/computer15.html
这里使用了十六进制的整数表示方式。可以看到,movs指令将0x8FFF扩展以后存入%eax寄存器,其中%dx为寄存器%edx的后16位表示。
6、MOVZ 指令
MOVZ 指令和上面的MOVS 指令十分相似。指令格式为 [movzxy S D],其中x、y为数据格式,S为源操作数,D为目的操作数。x、y的组合有三种,分别是bw,bl,wl,分别表示字节(8位)传送到字(16位),字节(16位)传送到双字(32位),字(16位)传送到双字(32位)。
将较小的源数据复制到一个较大的数据位置。高位用0扩展,即目的位置的所有高位用0进行填充。
比如对于指令movzwl %dx %eax来讲,它的作用如下图所示。
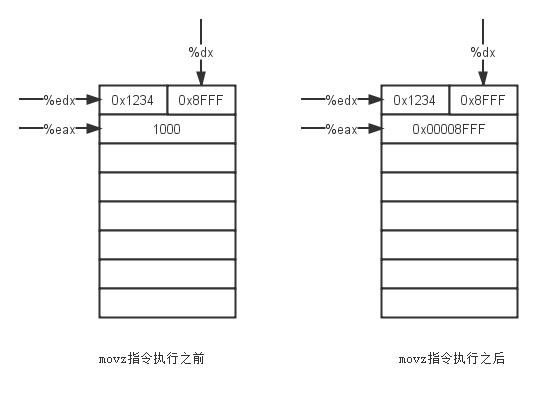
上图引用至:http://www.cnblogs.com/zuoxiaolong/p/computer15.html
扩展后,目标寄存器%eax的前16位为0而不再是1。
7、push 和 pop 指令
我们知道 栈 是一个数据结构,可以添加或删除值,遵循“后进先出”的原则。
push:把数据压入栈中,添加数据。
pop:把数据移出栈,删除数据。注意移出的值总是最近被压入而仍然在栈中的值。
栈可以实现为一个数组,总是从数组的一端插入或删除元素。而这一端称为栈顶,在 IA32 中,程序栈存放在存储器某个区域,如下图所示:
注意由于操作数字节的不同,pushl 是将双字(32位)压入栈中;popl 是移出双字。
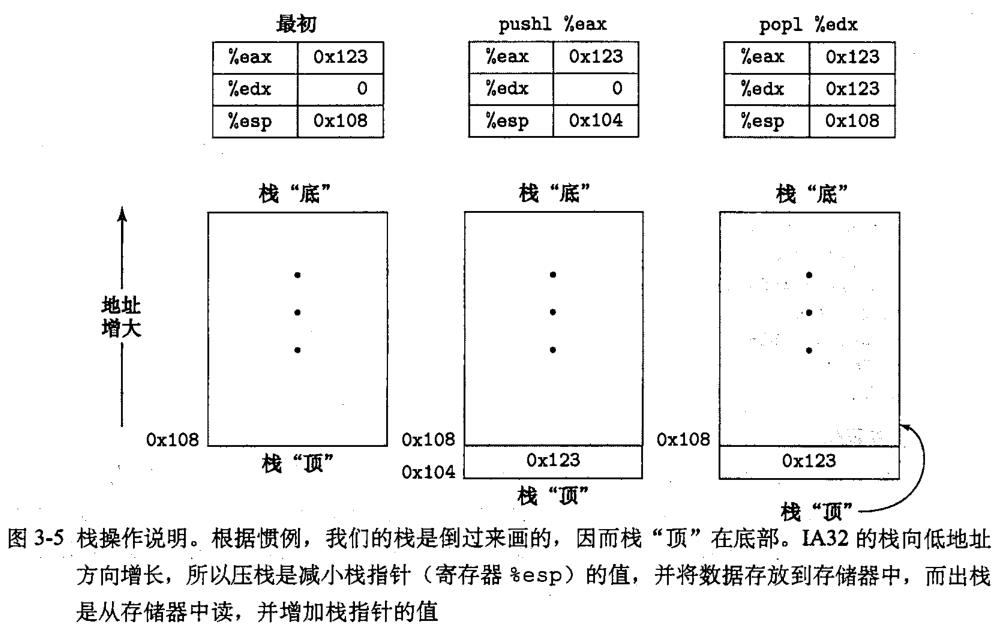
将一个双字值压入栈中,首先要将栈指针减4,然后将值写到新的栈顶地址。因此指令 pushl %ebp 等价于下面两条指令:
subl $4,%esp
movl %ebp,(%esp)
上图所示,当 %esp 为0x108,%eax为0x123时,执行指令 pushl %ebp 的效果。首先 %esp 会减4,得到0x104,然后会将 0x123 存放到存储器地址 0x104处。
将一个双字值从栈顶移出,首先要从栈顶位置读出数据,然后将栈指针加4。因此指令 popl %eax 等价于下面两条指令:
movl (%esp),%eax
addl $4,%esp
上图所示,先从存储器中读取值 0x123,再写到寄存器 %edx中,然后寄存器%esp的值将增加回到0x108。
注意值0x123仍然会保存在存储器0x104中,直到被覆盖(比如被另一条入栈操作覆盖)。无论如何,%esp 指向的地址总是栈顶,任何存储在栈顶之外的数据都认为是无效的。
8、总结
本章主要介绍了操作数指示符,需要我们理解几种表达式的计算方法。接着介绍了几种数据传送指令,包括MOV,MOVS,MOVZ,PUSH和POP等,总体上来看不难理解,我们在了解这些指令后,再回头看那些汇编代码,应该会理解很多了。下一篇博客我们将进一步介绍汇编指令——算术和逻辑操作。
以上是关于深入理解计算机系统(3.3)------操作数指示符和数据传送指令的主要内容,如果未能解决你的问题,请参考以下文章