21天实战caffe数据结构
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了21天实战caffe数据结构相关的知识,希望对你有一定的参考价值。
caffe中一个CNN模型由Net表示,Net由多个Layer堆叠而成。
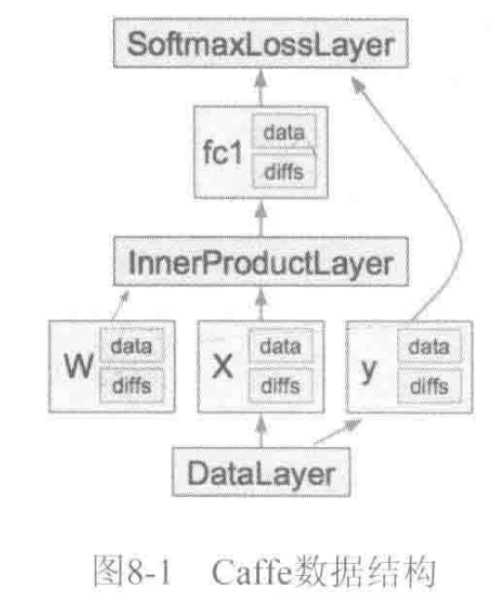
caffe的万丈高楼(Net)是由图纸(prototxt),用blob这些砖块筑成一层层(Layer),最后通过SGD方法(Solver)进行简装修(train)、精装修(finetune)实现的。
Blob
Blob在内存中表示为4维数组,维度从低到高为(width_,height_,channels_,num_)。用于存储数据(data)或权值增量(diff)。
Blob中封装里SyncedMemory类。Bolob作为基本单元服务Layer、Net、Solver等。
接下来看看blob.hpp:
#include "caffe/proto/caffe.pb.h"
#include "caffe/syncedmem.hpp"
const int kMaxBlobAxes = 32;
namespace caffe {
/**
* @brief A wrapper around SyncedMemory holders serving as the basic
* computational unit through which Layer%s, Net%s, and Solver%s
* interact.
*
* TODO(dox): more thorough description.
*/
template <typename Dtype>
class Blob {
public:
Blob()
: data_(), diff_(), count_(0), capacity_(0) {}
/// @brief Deprecated; use <code>Blob(const vector<int>& shape)</code>.
explicit Blob(const int num, const int channels, const int height,
const int width);
explicit Blob(const vector<int>& shape);
/// @brief Deprecated; use <code>Reshape(const vector<int>& shape)</code>.
void Reshape(const int num, const int channels, const int height,
const int width);
/**
* @brief Change the dimensions of the blob, allocating new memory if
* necessary.
*
* This function can be called both to create an initial allocation
* of memory, and to adjust the dimensions of a top blob during Layer::Reshape
* or Layer::Forward. When changing the size of blob, memory will only be
* reallocated if sufficient memory does not already exist, and excess memory
* will never be freed.
*
* Note that reshaping an input blob and immediately calling Net::Backward is
* an error; either Net::Forward or Net::Reshape need to be called to
* propagate the new input shape to higher layers.
*/
void Reshape(const vector<int>& shape);
void Reshape(const BlobShape& shape);
void ReshapeLike(const Blob& other);
inline string shape_string() const {
ostringstream stream;
for (int i = 0; i < shape_.size(); ++i) {
stream << shape_[i] << " ";
}
stream << "(" << count_ << ")";
return stream.str();
}
inline const vector<int>& shape() const { return shape_; }
/**
* @brief Returns the dimension of the index-th axis (or the negative index-th
* axis from the end, if index is negative).
*
* @param index the axis index, which may be negative as it will be
* "canonicalized" using CanonicalAxisIndex.
* Dies on out of range index.
*/
inline int shape(int index) const {
return shape_[CanonicalAxisIndex(index)];
}
inline int num_axes() const { return shape_.size(); }
inline int count() const { return count_; }
/**
* @brief Compute the volume of a slice; i.e., the product of dimensions
* among a range of axes.
*
* @param start_axis The first axis to include in the slice.
*
* @param end_axis The first axis to exclude from the slice.
*/
inline int count(int start_axis, int end_axis) const {
CHECK_LE(start_axis, end_axis);
CHECK_GE(start_axis, 0);
CHECK_GE(end_axis, 0);
CHECK_LE(start_axis, num_axes());
CHECK_LE(end_axis, num_axes());
int count = 1;
for (int i = start_axis; i < end_axis; ++i) {
count *= shape(i);
}
return count;
}
/**
* @brief Compute the volume of a slice spanning from a particular first
* axis to the final axis.
*
* @param start_axis The first axis to include in the slice.
*/
inline int count(int start_axis) const {
return count(start_axis, num_axes());
}
/**
* @brief Returns the ‘canonical‘ version of a (usually) user-specified axis,
* allowing for negative indexing (e.g., -1 for the last axis).
*
* @param axis_index the axis index.
* If 0 <= index < num_axes(), return index.
* If -num_axes <= index <= -1, return (num_axes() - (-index)),
* e.g., the last axis index (num_axes() - 1) if index == -1,
* the second to last if index == -2, etc.
* Dies on out of range index.
*/
inline int CanonicalAxisIndex(int axis_index) const {
CHECK_GE(axis_index, -num_axes())
<< "axis " << axis_index << " out of range for " << num_axes()
<< "-D Blob with shape " << shape_string();
CHECK_LT(axis_index, num_axes())
<< "axis " << axis_index << " out of range for " << num_axes()
<< "-D Blob with shape " << shape_string();
if (axis_index < 0) {
return axis_index + num_axes();
}
return axis_index;
}
/// @brief Deprecated legacy shape accessor num: use shape(0) instead.
inline int num() const { return LegacyShape(0); }
/// @brief Deprecated legacy shape accessor channels: use shape(1) instead.
inline int channels() const { return LegacyShape(1); }
/// @brief Deprecated legacy shape accessor height: use shape(2) instead.
inline int height() const { return LegacyShape(2); }
/// @brief Deprecated legacy shape accessor width: use shape(3) instead.
inline int width() const { return LegacyShape(3); }
inline int LegacyShape(int index) const {
CHECK_LE(num_axes(), 4)
<< "Cannot use legacy accessors on Blobs with > 4 axes.";
CHECK_LT(index, 4);
CHECK_GE(index, -4);
if (index >= num_axes() || index < -num_axes()) {
// Axis is out of range, but still in [0, 3] (or [-4, -1] for reverse
// indexing) -- this special case simulates the one-padding used to fill
// extraneous axes of legacy blobs.
return 1;
}
return shape(index);
}
inline int offset(const int n, const int c = 0, const int h = 0,
const int w = 0) const {
CHECK_GE(n, 0);
CHECK_LE(n, num());
CHECK_GE(channels(), 0);
CHECK_LE(c, channels());
CHECK_GE(height(), 0);
CHECK_LE(h, height());
CHECK_GE(width(), 0);
CHECK_LE(w, width());
return ((n * channels() + c) * height() + h) * width() + w;
}
inline int offset(const vector<int>& indices) const {
CHECK_LE(indices.size(), num_axes());
int offset = 0;
for (int i = 0; i < num_axes(); ++i) {
offset *= shape(i);
if (indices.size() > i) {
CHECK_GE(indices[i], 0);
CHECK_LT(indices[i], shape(i));
offset += indices[i];
}
}
return offset;
}
/**
* @brief Copy from a source Blob.
*
* @param source the Blob to copy from
* @param copy_diff if false, copy the data; if true, copy the diff
* @param reshape if false, require this Blob to be pre-shaped to the shape
* of other (and die otherwise); if true, Reshape this Blob to other‘s
* shape if necessary
*/
void CopyFrom(const Blob<Dtype>& source, bool copy_diff = false,
bool reshape = false);
inline Dtype data_at(const int n, const int c, const int h,
const int w) const {
return cpu_data()[offset(n, c, h, w)];
}
inline Dtype diff_at(const int n, const int c, const int h,
const int w) const {
return cpu_diff()[offset(n, c, h, w)];
}
inline Dtype data_at(const vector<int>& index) const {
return cpu_data()[offset(index)];
}
inline Dtype diff_at(const vector<int>& index) const {
return cpu_diff()[offset(index)];
}
inline const shared_ptr<SyncedMemory>& data() const {
CHECK(data_);
return data_;
}
inline const shared_ptr<SyncedMemory>& diff() const {
CHECK(diff_);
return diff_;
}
const Dtype* cpu_data() const;
void set_cpu_data(Dtype* data);
const int* gpu_shape() const;
const Dtype* gpu_data() const;
void set_gpu_data(Dtype* data);
const Dtype* cpu_diff() const;
const Dtype* gpu_diff() const;
Dtype* mutable_cpu_data();
Dtype* mutable_gpu_data();
Dtype* mutable_cpu_diff();
Dtype* mutable_gpu_diff();
void Update();
void FromProto(const BlobProto& proto, bool reshape = true);
void ToProto(BlobProto* proto, bool write_diff = false) const;
/// @brief Compute the sum of absolute values (L1 norm) of the data.
Dtype asum_data() const;
/// @brief Compute the sum of absolute values (L1 norm) of the diff.
Dtype asum_diff() const;
/// @brief Compute the sum of squares (L2 norm squared) of the data.
Dtype sumsq_data() const;
/// @brief Compute the sum of squares (L2 norm squared) of the diff.
Dtype sumsq_diff() const;
/// @brief Scale the blob data by a constant factor.
void scale_data(Dtype scale_factor);
/// @brief Scale the blob diff by a constant factor.
void scale_diff(Dtype scale_factor);
/**
* @brief Set the data_ shared_ptr to point to the SyncedMemory holding the
* data_ of Blob other -- useful in Layer%s which simply perform a copy
* in their Forward pass.
*
* This deallocates the SyncedMemory holding this Blob‘s data_, as
* shared_ptr calls its destructor when reset with the "=" operator.
*/
void ShareData(const Blob& other);
/**
* @brief Set the diff_ shared_ptr to point to the SyncedMemory holding the
* diff_ of Blob other -- useful in Layer%s which simply perform a copy
* in their Forward pass.
*
* This deallocates the SyncedMemory holding this Blob‘s diff_, as
* shared_ptr calls its destructor when reset with the "=" operator.
*/
void ShareDiff(const Blob& other);
bool ShapeEquals(const BlobProto& other);
protected:
shared_ptr<SyncedMemory> data_;
shared_ptr<SyncedMemory> diff_;
shared_ptr<SyncedMemory> shape_data_;
vector<int> shape_;
int count_;
int capacity_;
DISABLE_COPY_AND_ASSIGN(Blob);
}; // class Blob
以上是关于21天实战caffe数据结构的主要内容,如果未能解决你的问题,请参考以下文章
《深度学习-21天实战Caffe》高清带标签完整PDF版下载