层层递进——宽度优先搜索(BFS)
Posted ~不会飞的章鱼~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了层层递进——宽度优先搜索(BFS)相关的知识,希望对你有一定的参考价值。
问题引入
我们接着上次“解救小哈”的问题继续探索,不过这次是用宽度优先搜索(BFS)。
注:问题来源可以点击这里 http://www.cnblogs.com/OctoptusLian/p/7429645.html
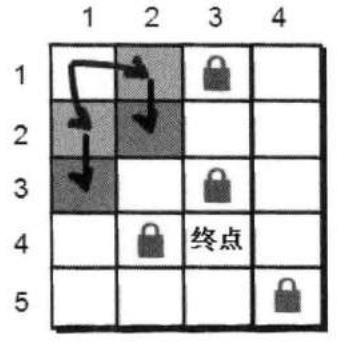
最开始小哼在入口(1,1)处,一步之内可以到达的点有(1,2)和(2,1)。

但是小哈并不在这两个点上,那小哼只能通过(1,2)和(2,1)这两点继续往下走。
比如现在小哼走到了(1,2)这个点,之后他又能够到达哪些新的点呢?有(2,2)。再看看通过(2,1)又可以到达哪些点呢?可以到达(2,2)和(3,1)。
此时你会发现(2,2)这个点既可以从(1,2)到达,也可以从(2,1)到达,并且都只使用了两步。
注:为了防止一个点多次被走到,这里需要一个数组来记录一个点是否已经被走到过。
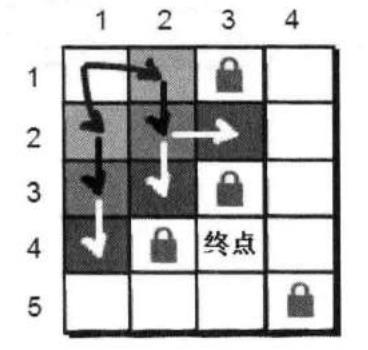
此时小哼2步可以走到的点就全部走到了,有(2,2)和(3,1),可是小哈并不在这两个点上。看来没有别的办法,还得继续往下尝试,看看通过(2,2)和(3,1)这两个点还能到达哪些新的没有走到过的点。
通过(2,2)这个点我们可以到达(2,3)和(3,2),通过(3,1)可以到达(3,2)和(4,1)。
现在三步可以到达的点有(2,3)、(3,2)和(4,1),依旧没有到达小哈的所在点,所以我们需要继续重复刚才的做法,直到找到小哈所在点为止。
解决步骤
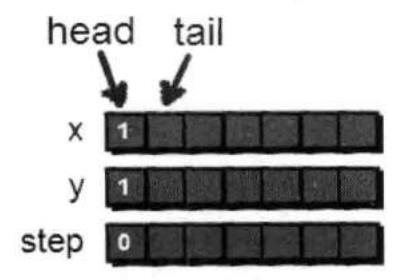
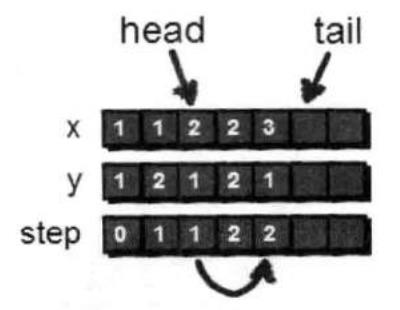
回顾一下刚才的算法,可以用一个队列来模拟这个过程。在这里我们用一个结构体来实现队列
struct note{ int x; //横坐标 int y; //纵坐标 int s; //步数 }; struct note que[2501]; //因为地图大小不超过50*50,因此队列扩展不会超过2500个 int head,tail; int a[51][51] = {0}; //用来存储地图 int book[51][51] = {0}; //数组book的作用是记录哪些点已经在队列中了,防止一个点被重复扩展,并全部初始化为0 /*最开始的时候需要进行队列初始化,即将队列设置为空*/ head = 1; tail = 1; //第一步将(1,1)加入队列,并标记(1,1)已经走过。 que[tail].x = 1; que[tail].y = 1; que[tail].s = 0; tail++; book[1][1] = 1;
然后从(1,1)开始,先尝试往右走到达了(1,2)。
tx = que[head].x; ty = que[head].y+1;
需要判断(1,2)是否越界。
if(tx < 1 || tx > n || ty < 1 || ty > m) continue;
再判断(1,2)是否为障碍物或者已经在路径中。
if(a[tx][ty] == 0 && book[tx][ty] == 0) { }
如果满足上面的条件,则将(1,2)入队,并标记该点已经走过。
book[tx][ty] = 1; //注意bfs每个点通常情况下只入队一次,和深搜不同,不需要将book数组还原 //插入新的点到队列中 que[tail].x = tx; que[tail].y = ty; que[tail].s = que[head].s+1; //步数是父亲的步数+1 tail++;

接下来还要继续尝试往其他方向走。
在这里我们规定一个顺序,即按照顺时针的方向来尝试(右→下→左→上)。
我们发现从(1,1)还是可以到达(2,1),因此也需要将(2,1)也加入队列,代码实现与刚才对(1,2)的操作是一样的。

对(1,1)扩展完毕后,此时我们将(1,1)出队(因为扩展完毕,已经没用了)。
head++;
接下来我们需要在刚才新扩展出的(1,2)和(2,1)这两个点上继续向下探索(因为还没有到达小哈所在的位置,所以还需要继续)。
(1,1)出队之后,现在队列的head正好指向了(1,2)这个点,现在我们需要通过这个点继续扩展,通过(1,2)可以到达(2,2),并将(2,2)也加入队列。
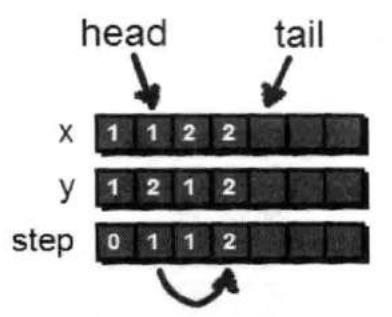
(1,2)这个点已经处理完毕,于是可以将(1,2)出队。(1,2)出队之后,head指向了(2,1)这个点。通过(2,1)可以到达(2,2)和(3,1),但是因为(2,2)已经在队列中,因此我们只需要将(3,1)入队。
到目前为止我们已经扩展出从起点出发2步以内可以到达的所有点,可是依旧没有到达小哈所在的位置,因此还需要继续扩展,直到找到小哈所在的点才算结束。
为了方便向四个方向扩展,这里需要一个next数组:
int next[4][2] = { //顺时针方向 {0,1}; //向右走 {1,0}; //向下走 {0,-1}; //向左走 {-1,0}; //向上走 }
完整代码如下
#include<stdio.h> struct note{ int x; //横坐标 int y; //纵坐标 int f; //父亲在队列中的编号(本题不需要输出路径,可以不需要f) int s; //步数 }; int main() { struct note que[2501]; //因为地图大小不超过50*50,因此队列扩展不会超过2500个 int a[51][51] = {0}; //用来存储地图 int book[51][51] = {0}; //数组book的作用是记录哪些点已经在队列中了,防止一个点被重复扩展,并全部初始化为0 //定义一个用于表示走的方向的数组 int next[4][2] = { //顺时针方向 {0,1}, //向右走 {1,0}, //向下走 {0,-1}, //向左走 {-1,0}, //向上走 }; int head,tail; int i,j,k,n,m,startx,starty,p,q,tx,ty,flag; scanf("%d %d",&n,&m); for(i=1;i<=n;i++) for(j=1;j<=m;j++) scanf("%d",&a[i][j]); scanf("%d %d %d %d",&startx,&starty,&p,&q); //队列初始化 head = 1; tail = 1; //往队列插入迷宫入口坐标 que[tail].x = startx; que[tail].y = starty; que[tail].f = 0; que[tail].s = 0; tail++; book[startx][starty] = 1; flag = 0; //用来标记是否到达目标点,0表示暂时没有到达, 1表示已到达 while(head < tail){ //当队列不为空时循环 for(k=0;k<=3;k++) //枚举四个方向 { //计算下一个点的坐标 tx = que[head].x + next[k][0]; ty = que[head].y + next[k][1]; if(tx < 1 || tx > n || ty < 1 || ty > m) //判断是否越界 continue; if(a[tx][ty] == 0 && book[tx][ty] == 0) //判断是否是障碍物或者已经在路径中 { book[tx][ty] = 1; //把这个点标记为已经走过。注意bfs每个点通常情况下只入队一次,和深搜不同,不需要将book数组还原 //插入新的点到队列中 que[tail].x = tx; que[tail].y = ty; que[tail].f = head; //因为这个点是从head扩展出来的,所以它的父亲是head,本题不需要求路径,因此可省略 que[tail].s = que[head].s+1; //步数是父亲的步数+1 tail++; } if(tx == p && ty == q) //如果到目标点了,停止扩展,任务结束,退出循环 { flag = 1; //重要!两句不要写反 break; } } if(flag == 1) break; head++; //当一个点扩展结束后,才能对后面的点再进行扩展 } printf("%d",que[tail-1].s); //打印队列中末尾最后一个点,也就是目标点的步数 //注意tail是指向队列队尾(最后一位)的下一个位置,所以这里需要减1 getchar();getchar(); return 0; }
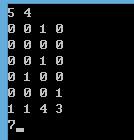
第一行有两个数n m,n表示迷宫的行数,m表示迷宫的列数。
接下来n行m列为迷宫,0表示空地,1表示障碍物。
最后一行四个数,前两个数表示迷宫入口的x和y坐标,后两个为小哈的x和y坐标。
写在最后
通过本次学习,我们知道一道问题的解决方法是多种多样的,不光可以用深度优先搜索来解,也可以用宽度优先搜索。
个人感觉宽度优先搜索就像是一次病原体的扩散,目的是要以最短的速度扩散到最广的范围。
注:文章内容源自《啊哈算法》
以上是关于层层递进——宽度优先搜索(BFS)的主要内容,如果未能解决你的问题,请参考以下文章