用Tensorflow基于Deep Q Learning DQN 玩Flappy Bird
Posted songrotek
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了用Tensorflow基于Deep Q Learning DQN 玩Flappy Bird相关的知识,希望对你有一定的参考价值。
前言
2013年DeepMind 在NIPS上发表Playing Atari with Deep Reinforcement Learning 一文,提出了DQN(Deep Q Network)算法,实现端到端学习玩Atari游戏,即只有像素输入,看着屏幕玩游戏。Deep Mind就凭借这个应用以6亿美元被Google收购。由于DQN的开源,在github上涌现了大量各种版本的DQN程序。但大多是复现Atari的游戏,代码量很大,也不好理解。
Flappy Bird是个极其简单又困难的游戏,风靡一时。在很早之前,就有人使用Q-Learning 算法来实现完Flappy Bird。http://sarvagyavaish.github.io/FlappyBirdRL/
但是这个的实现是通过获取小鸟的具体位置信息来实现的。
能否使用DQN来实现通过屏幕学习玩Flappy Bird是一个有意思的挑战。(话说本人和朋友在去年年底也考虑了这个idea,但当时由于不知道如何截取游戏屏幕只能使用具体位置来学习,不过其实也成功了)
最近,github上有人放出使用DQN玩Flappy Bird的代码,https://github.com/yenchenlin1994/DeepLearningFlappyBird【1】
该repo通过结合之前的repo成功实现了这个想法。这个repo对整个实现过程进行了较详细的分析,但是由于其DQN算法的代码基本采用别人的repo,代码较为混乱,不易理解。
为此,本人改写了一个版本https://github.com/songrotek/DRL-FlappyBird
对DQN代码进行了重新改写。本质上对其做了类的封装,从而使代码更具通用性。可以方便移植到其他应用。
当然,本文的目的是借Flappy Bird DQN这个代码来详细分析一下DQN算法极其使用。
DQN 伪代码
这个是NIPS13版本的伪代码:
Initialize replay memory D to size N
Initialize action-value function Q with random weights
for episode = 1, M do
Initialize state s_1
for t = 1, T do
With probability ϵ select random action a_t
otherwise select a_t=max_a Q($s_t$,a; $θ_i$)
Execute action a_t in emulator and observe r_t and s_(t+1)
Store transition (s_t,a_t,r_t,s_(t+1)) in D
Sample a minibatch of transitions (s_j,a_j,r_j,s_(j+1)) from D
Set y_j:=
r_j for terminal s_(j+1)
r_j+γ*max_(a^' ) Q(s_(j+1),a'; θ_i) for non-terminal s_(j+1)
Perform a gradient step on (y_j-Q(s_j,a_j; θ_i))^2 with respect to θ
end for
end for基本的分析详见Paper Reading 1 - Playing Atari with Deep Reinforcement Learning
基础知识详见Deep Reinforcement Learning 基础知识(DQN方面)
本文主要从代码实现的角度来分析如何编写Flappy Bird DQN的代码
编写FlappyBirdDQN.py
首先,FlappyBird的游戏已经编写好,是现成的。提供了很简单的接口:
nextObservation,reward,terminal = game.frame_step(action)即输入动作,输出执行完动作的屏幕截图,得到的反馈reward,以及游戏是否结束。
那么,现在先把DQN想象为一个大脑,这里我们也用BrainDQN类来表示,这个类只需获取感知信息也就是上面说的观察(截图),反馈以及是否结束,然后输出动作即可。
完美的代码封装应该是这样。具体DQN里面如何存储。如何训练是外部不关心的。
因此,我们的FlappyBirdDQN代码只有如下这么短:
# -------------------------
# Project: Deep Q-Learning on Flappy Bird
# Author: Flood Sung
# Date: 2016.3.21
# -------------------------
import cv2
import sys
sys.path.append("game/")
import wrapped_flappy_bird as game
from BrainDQN import BrainDQN
import numpy as np
# preprocess raw image to 80*80 gray image
def preprocess(observation):
observation = cv2.cvtColor(cv2.resize(observation, (80, 80)), cv2.COLOR_BGR2GRAY)
ret, observation = cv2.threshold(observation,1,255,cv2.THRESH_BINARY)
return np.reshape(observation,(80,80,1))
def playFlappyBird():
# Step 1: init BrainDQN
brain = BrainDQN()
# Step 2: init Flappy Bird Game
flappyBird = game.GameState()
# Step 3: play game
# Step 3.1: obtain init state
action0 = np.array([1,0]) # do nothing
observation0, reward0, terminal = flappyBird.frame_step(action0)
observation0 = cv2.cvtColor(cv2.resize(observation0, (80, 80)), cv2.COLOR_BGR2GRAY)
ret, observation0 = cv2.threshold(observation0,1,255,cv2.THRESH_BINARY)
brain.setInitState(observation0)
# Step 3.2: run the game
while 1!= 0:
action = brain.getAction()
nextObservation,reward,terminal = flappyBird.frame_step(action)
nextObservation = preprocess(nextObservation)
brain.setPerception(nextObservation,action,reward,terminal)
def main():
playFlappyBird()
if __name__ == '__main__':
main()核心部分就在while循环里面,由于要讲图像转换为80x80的灰度图,因此,加了一个preprocess预处理函数。
这里,显然只有有游戏引擎,换一个游戏是一样的写法,非常方便。
接下来就是编写BrainDQN.py 我们的游戏大脑
编写BrainDQN
基本架构:
class BrainDQN:
def __init__(self):
# init replay memory
self.replayMemory = deque()
# init Q network
self.createQNetwork()
def createQNetwork(self):
def trainQNetwork(self):
def setPerception(self,nextObservation,action,reward,terminal):
def getAction(self):
def setInitState(self,observation):基本的架构也就只需要上面这几个函数,其他的都是多余了,接下来就是编写每一部分的代码。
CNN代码
也就是createQNetwork部分,这里采用如下图的结构(转自【1】):
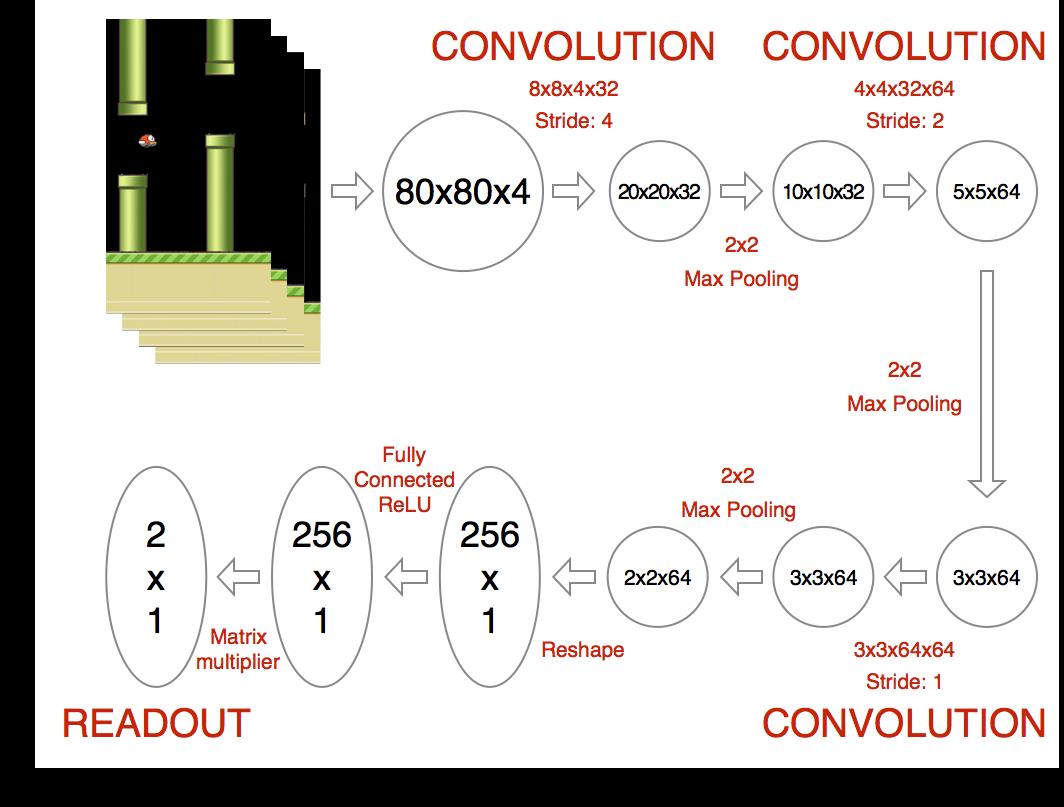
这里就不讲解整个流程了。主要是针对具体的输入类型和输出设计卷积和全连接层。
代码如下:
def createQNetwork(self):
# network weights
W_conv1 = self.weight_variable([8,8,4,32])
b_conv1 = self.bias_variable([32])
W_conv2 = self.weight_variable([4,4,32,64])
b_conv2 = self.bias_variable([64])
W_conv3 = self.weight_variable([3,3,64,64])
b_conv3 = self.bias_variable([64])
W_fc1 = self.weight_variable([1600,512])
b_fc1 = self.bias_variable([512])
W_fc2 = self.weight_variable([512,self.ACTION])
b_fc2 = self.bias_variable([self.ACTION])
# input layer
self.stateInput = tf.placeholder("float",[None,80,80,4])
# hidden layers
h_conv1 = tf.nn.relu(self.conv2d(self.stateInput,W_conv1,4) + b_conv1)
h_pool1 = self.max_pool_2x2(h_conv1)
h_conv2 = tf.nn.relu(self.conv2d(h_pool1,W_conv2,2) + b_conv2)
h_conv3 = tf.nn.relu(self.conv2d(h_conv2,W_conv3,1) + b_conv3)
h_conv3_flat = tf.reshape(h_conv3,[-1,1600])
h_fc1 = tf.nn.relu(tf.matmul(h_conv3_flat,W_fc1) + b_fc1)
# Q Value layer
self.QValue = tf.matmul(h_fc1,W_fc2) + b_fc2
self.actionInput = tf.placeholder("float",[None,self.ACTION])
self.yInput = tf.placeholder("float", [None])
Q_action = tf.reduce_sum(tf.mul(self.QValue, self.actionInput), reduction_indices = 1)
self.cost = tf.reduce_mean(tf.square(self.yInput - Q_action))
self.trainStep = tf.train.AdamOptimizer(1e-6).minimize(self.cost)记住输出是Q值,关键要计算出cost,里面关键是计算Q_action的值,即该state和action下的Q值。由于actionInput是one hot vector的形式,因此tf.mul(self.QValue, self.actionInput)正好就是该action下的Q值。
training 部分。
这部分是代码的关键部分,主要是要计算y值,也就是target Q值。
def trainQNetwork(self):
# Step 1: obtain random minibatch from replay memory
minibatch = random.sample(self.replayMemory,self.BATCH_SIZE)
state_batch = [data[0] for data in minibatch]
action_batch = [data[1] for data in minibatch]
reward_batch = [data[2] for data in minibatch]
nextState_batch = [data[3] for data in minibatch]
# Step 2: calculate y
y_batch = []
QValue_batch = self.QValue.eval(feed_dict={self.stateInput:nextState_batch})
for i in range(0,self.BATCH_SIZE):
terminal = minibatch[i][4]
if terminal:
y_batch.append(reward_batch[i])
else:
y_batch.append(reward_batch[i] + GAMMA * np.max(QValue_batch[i]))
self.trainStep.run(feed_dict={
self.yInput : y_batch,
self.actionInput : action_batch,
self.stateInput : state_batch
})其他部分
其他部分就比较容易了,这里直接贴出完整的代码:
# -----------------------------
# File: Deep Q-Learning Algorithm
# Author: Flood Sung
# Date: 2016.3.21
# -----------------------------
import tensorflow as tf
import numpy as np
import random
from collections import deque
class BrainDQN:
# Hyper Parameters:
ACTION = 2
FRAME_PER_ACTION = 1
GAMMA = 0.99 # decay rate of past observations
OBSERVE = 100000. # timesteps to observe before training
EXPLORE = 150000. # frames over which to anneal epsilon
FINAL_EPSILON = 0.0 # final value of epsilon
INITIAL_EPSILON = 0.0 # starting value of epsilon
REPLAY_MEMORY = 50000 # number of previous transitions to remember
BATCH_SIZE = 32 # size of minibatch
def __init__(self):
# init replay memory
self.replayMemory = deque()
# init Q network
self.createQNetwork()
# init some parameters
self.timeStep = 0
self.epsilon = self.INITIAL_EPSILON
def createQNetwork(self):
# network weights
W_conv1 = self.weight_variable([8,8,4,32])
b_conv1 = self.bias_variable([32])
W_conv2 = self.weight_variable([4,4,32,64])
b_conv2 = self.bias_variable([64])
W_conv3 = self.weight_variable([3,3,64,64])
b_conv3 = self.bias_variable([64])
W_fc1 = self.weight_variable([1600,512])
b_fc1 = self.bias_variable([512])
W_fc2 = self.weight_variable([512,self.ACTION])
b_fc2 = self.bias_variable([self.ACTION])
# input layer
self.stateInput = tf.placeholder("float",[None,80,80,4])
# hidden layers
h_conv1 = tf.nn.relu(self.conv2d(self.stateInput,W_conv1,4) + b_conv1)
h_pool1 = self.max_pool_2x2(h_conv1)
h_conv2 = tf.nn.relu(self.conv2d(h_pool1,W_conv2,2) + b_conv2)
h_conv3 = tf.nn.relu(self.conv2d(h_conv2,W_conv3,1) + b_conv3)
h_conv3_flat = tf.reshape(h_conv3,[-1,1600])
h_fc1 = tf.nn.relu(tf.matmul(h_conv3_flat,W_fc1) + b_fc1)
# Q Value layer
self.QValue = tf.matmul(h_fc1,W_fc2) + b_fc2
self.actionInput = tf.placeholder("float",[None,self.ACTION])
self.yInput = tf.placeholder("float", [None])
Q_action = tf.reduce_sum(tf.mul(self.QValue, self.actionInput), reduction_indices = 1)
self.cost = tf.reduce_mean(tf.square(self.yInput - Q_action))
self.trainStep = tf.train.AdamOptimizer(1e-6).minimize(self.cost)
# saving and loading networks
saver = tf.train.Saver()
self.session = tf.InteractiveSession()
self.session.run(tf.initialize_all_variables())
checkpoint = tf.train.get_checkpoint_state("saved_networks")
if checkpoint and checkpoint.model_checkpoint_path:
saver.restore(self.session, checkpoint.model_checkpoint_path)
print "Successfully loaded:", checkpoint.model_checkpoint_path
else:
print "Could not find old network weights"
def trainQNetwork(self):
# Step 1: obtain random minibatch from replay memory
minibatch = random.sample(self.replayMemory,self.BATCH_SIZE)
state_batch = [data[0] for data in minibatch]
action_batch = [data[1] for data in minibatch]
reward_batch = [data[2] for data in minibatch]
nextState_batch = [data[3] for data in minibatch]
# Step 2: calculate y
y_batch = []
QValue_batch = self.QValue.eval(feed_dict={self.stateInput:nextState_batch})
for i in range(0,self.BATCH_SIZE):
terminal = minibatch[i][4]
if terminal:
y_batch.append(reward_batch[i])
else:
y_batch.append(reward_batch[i] + GAMMA * np.max(QValue_batch[i]))
self.trainStep.run(feed_dict={
self.yInput : y_batch,
self.actionInput : action_batch,
self.stateInput : state_batch
})
# save network every 100000 iteration
if self.timeStep % 10000 == 0:
saver.save(self.session, 'saved_networks/' + 'network' + '-dqn', global_step = self.timeStep)
def setPerception(self,nextObservation,action,reward,terminal):
newState = np.append(nextObservation,self.currentState[:,:,1:],axis = 2)
self.replayMemory.append((self.currentState,action,reward,newState,terminal))
if len(self.replayMemory) > self.REPLAY_MEMORY:
self.replayMemory.popleft()
if self.timeStep > self.OBSERVE:
# Train the network
self.trainQNetwork()
self.currentState = newState
self.timeStep += 1
def getAction(self):
QValue = self.QValue.eval(feed_dict= {self.stateInput:[self.currentState]})[0]
action = np.zeros(self.ACTION)
action_index = 0
if self.timeStep % self.FRAME_PER_ACTION == 0:
if random.random() <= self.epsilon:
action_index = random.randrange(self.ACTION)
action[action_index] = 1
else:
action_index = np.argmax(QValue)
action[action_index] = 1
else:
action[0] = 1 # do nothing
# change episilon
if self.epsilon > self.FINAL_EPSILON and self.timeStep > self.OBSERVE:
self.epsilon -= (self.INITIAL_EPSILON - self.FINAL_EPSILON)/self.EXPLORE
return action
def setInitState(self,observation):
self.currentState = np.stack((observation, observation, observation, observation), axis = 2)
def weight_variable(self,shape):
initial = tf.truncated_normal(shape, stddev = 0.01)
return tf.Variable(initial)
def bias_variable(self,shape):
initial = tf.constant(0.01, shape = shape)
return tf.Variable(initial)
def conv2d(self,x, W, stride):
return tf.nn.conv2d(x, W, strides = [1, stride, stride, 1], padding = "SAME")
def max_pool_2x2(self,x):
return tf.nn.max_pool(x, ksize = [1, 2, 2, 1], strides = [1, 2, 2, 1], padding = "SAME")
一共也只有160代码。
如果这个任务不使用深度学习,而是人工的从图像中找到小鸟,然后计算小鸟的轨迹,然后计算出应该怎么按键,那么代码没有好几千行是不可能的。深度学习大大减少了代码工作。
小结
本文从代码角度对于DQN做了一定的分析,对于DQN的应用,大家可以在此基础上做各种尝试。
以上是关于用Tensorflow基于Deep Q Learning DQN 玩Flappy Bird的主要内容,如果未能解决你的问题,请参考以下文章
《从机器学习到深度学习基于scikit-learn与TensorFlow的高效开发实战》PDF代码分析
分享《机器学习实战:基于Scikit-Learn和TensorFlow》+PDF+Aurelien
分享《机器学习实战:基于Scikit-Learn和TensorFlow》高清中英文PDF+源代码
分享《机器学习实战:基于Scikit-Learn和TensorFlow》高清中英文PDF+源代码