第四周作业
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第四周作业相关的知识,希望对你有一定的参考价值。
第四周作业
设计内容:
结合本周学习的交流电机原理及启动、调速、制动特性,用Modelica设计和仿真一个用三相交流异步电机带动起重机起升机构运行。具体要求如下:
1)实现如下机械运动周期:
l 控制电机带重物上升,从静止加速到800r/min
l 保持800r/min匀速运动0.5s,
l 减速到静止,保持静止状态0.5s,
l 带重物下降,从静止达到600r/min
l 保持600r/min匀速运动0.6s,
l 减速到静止。
(为了便于仿真,匀速和静止持续时间较短)
2) 升降机构和重物折算到到电机转子轴上的等效负载惯量为1Kg.m^2,折算到到电机转子轴上的等效负载转矩是15N.m。
3)使用统一的电机模型,如果控制策略中用到转子串电阻,允许将该电机的转子改为绕线式转子(参数不变)。
4)参照教材中给出的交流电机启动、调速和制动方法,设计控制策略,用Modelica实现控制策略并与电机模型实现联合仿真。
5)可以采用定子串电阻、转子串电阻、定子调压、定子调频等手段,但必须具备工程上的可实施性。
6)评价指标:快速启动、制动,冲击转矩和冲击电流小,能耗小,兼顾实施的经济性。
7)方案最佳同学获本周“控制之星”称号。
解答思路:
直接运行所给定的程序,可以得到启动曲线,按照控制设计要求简单控制时间和定子中磁场的转向即可初步得出仿真曲线,主要代码如下:
if time <= 100 then
u_A = 0;
u_B = 0;
u_C = 0;
f_s = 0;
Tl = 0;
elseif time <= 280 then
f_s = f_N;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000);
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3);
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3);
Tl = 15;
elseif time <= 800 then
f_s = f_N;
u_A = 0;
u_B = 0;
u_C = 0;
Tl = 0;
elseif time <= 974 then
f_s = f_N;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000);
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3);
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3);
Tl = 15;
elseif time <=1500 then
f_s = f_N;
u_A = 0;
u_B = 0;
u_C = 0;
Tl = 0;
elseif time <=1625 then
f_s = f_N;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000);
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3);
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3);
Tl = 0;
elseif time <=2125 then
f_s = f_N;
u_A = 0;
u_B = 0;
u_C = 0;
Tl = 0;
elseif time <= 2300 then
f_s = f_N;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000);
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3);
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3);
Tl = 15;
else
f_s = f_N;
u_A = 0;
u_B = 0;
u_C = 0;
Tl = 0;
end if;
仿真图像:
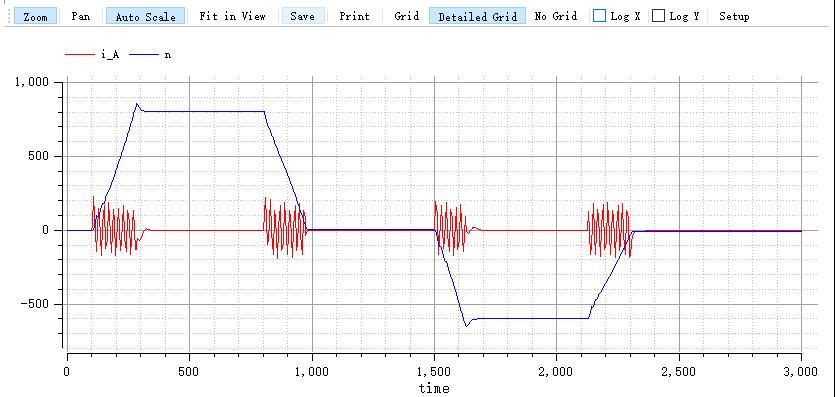
上诉图形是可以满足第一条要求的,但是分析之下可以明显看出在电机的转速改变时电流幅值较大,所以为了降低启动电流,这里考虑在定子Rs基础上串联电阻实现降压启动。
以上是关于第四周作业的主要内容,如果未能解决你的问题,请参考以下文章