OpenCV 之 图像分割
Posted 飞鸢逐浪
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 之 图像分割 相关的知识,希望对你有一定的参考价值。
1 基于阈值
1.1 灰度阈值化
灰度阈值化,是最简单,速度最快的图像分割方法,广泛用于硬件图像处理领域 (例如,基于 FPGA 的实时图像处理等)。
设输入图像 $f$,输出图像 $g$,则阈值化公式为:
$\\quad g(i, j) = \\begin{cases} 1 & \\text{当 f(i, j) ≥ T 时} \\\\0 & \\text{当 f(i, j) < T 时} \\\\ \\end{cases} $
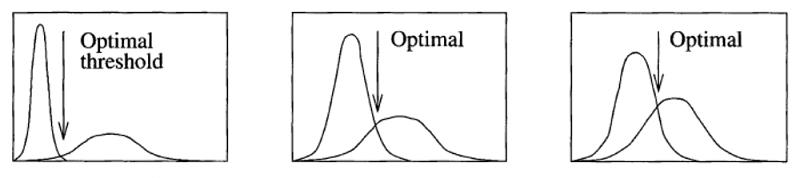
即,遍历图像中所有像素,当像素值 $f (i, j) ≥ T$ 时,分割后的图像元素 $g (i, j)$ 是物体像素,否则为背景像素。
当各物体不接触,且 物体和背景的灰度值差别比较明显 时,灰度阈值化是非常合适的分割方法。
1.2 固定阈值化
固定阈值化函数为 threshold,如下:
double cv::threshold ( InputArray src, // 输入图像 (单通道,8位或32位浮点型) OutputArray dst, // 输出图像 (大小和类型,都同输入) double thresh, // 阈值 double maxval, // 最大灰度值(使用 THRESH_BINARY 和 THRESH_BINARY_INV类型时) int type // 阈值化类型(THRESH_BINARY, THRESH_BINARY_INV; THRESH_TRUNC; THRESH_TOZERO, THRESH_TOZERO_INV) )
1) THRESH_BINARY
$\\qquad dst(x, y) = \\begin{cases} maxval & \\text{if src(x, y) > thresh} \\\\0 & \\text{otherwise} \\\\ \\end{cases} $
2) THRESH_TRUNC
$\\qquad dst(x, y) = \\begin{cases} threshold & \\text{if src(x, y) > thresh} \\\\src(x, y) & \\text{otherwise} \\\\ \\end{cases} $
3) THRESH_TOZERO
$\\qquad dst(x, y) = \\begin{cases} src(x, y) & \\text{if src(x, y) > thresh} \\\\0 & \\text{otherwise} \\\\ \\end{cases} $
1.3 自适应阈值化
整幅图像使用同一个阈值做二值化,对于一些情况并不适用,尤其是当图像中的不同区域,照明条件各不相同时。这种情况下,就需要自适应阈值算法,该算法可根据像素所在的区域,来确定一个适合的阈值。因此,对于一幅图中光照不同的区域,可取各自不同的阈值做二值化。
OpenCV 中,自适应阈值化函数为 adaptiveThreshold(),如下:
void cv::adaptiveThreshold (
InputArray src, //
OutputArray dst, //
double maxValue, //
int adaptiveMethod, // 自适应阈值算法,目前有 ADAPTIVE_THRESH_MEAN_C 和 ADAPTIVE_THRESH_GAUSSIAN_C 两种
int thresholdType, // 阈值化类型,同 threshold() 中的 type
int blockSize, // 邻域大小
double C //
)
1.4 示例
1)阈值化类型和阈值可选的代码示例,摘自 OpenCV 例程,略作修改


#include "opencv2/imgproc.hpp" #include "opencv2/imgcodecs.hpp" #include "opencv2/highgui.hpp" using namespace cv; int threshold_value = 0; int threshold_type = 3; int const max_value = 255; int const max_type = 4; int const max_BINARY_value = 255; Mat src, src_gray, dst; const char* window_name = "Threshold Demo"; const char* trackbar_type = "Type: \\n 0: Binary \\n 1: Binary Inverted \\n 2: Truncate \\n 3: To Zero \\n 4: To Zero Inverted"; const char* trackbar_value = "Value"; void Threshold_Demo(int, void*); int main( int, char** argv ) { // 读图 src = imread("Musikhaus.jpg",IMREAD_COLOR); if( src.empty() ) return -1; // 转化为灰度图 cvtColor( src, src_gray, COLOR_BGR2GRAY ); // 显示窗口 namedWindow( window_name, WINDOW_AUTOSIZE ); // 滑动条 - 阈值化类型 createTrackbar( trackbar_type, window_name, &threshold_type,max_type,Threshold_Demo); // 滑动条 - 阈值 createTrackbar( trackbar_value,window_name, &threshold_value,max_value,Threshold_Demo); Threshold_Demo(0, 0); waitKey(0); } void Threshold_Demo(int, void*) { /* 0: Binary 1: Binary Inverted 2: Threshold Truncated 3: Threshold to Zero 4: Threshold to Zero Inverted */ threshold(src_gray, dst, threshold_value, max_BINARY_value, threshold_type); imshow(window_name, dst); }
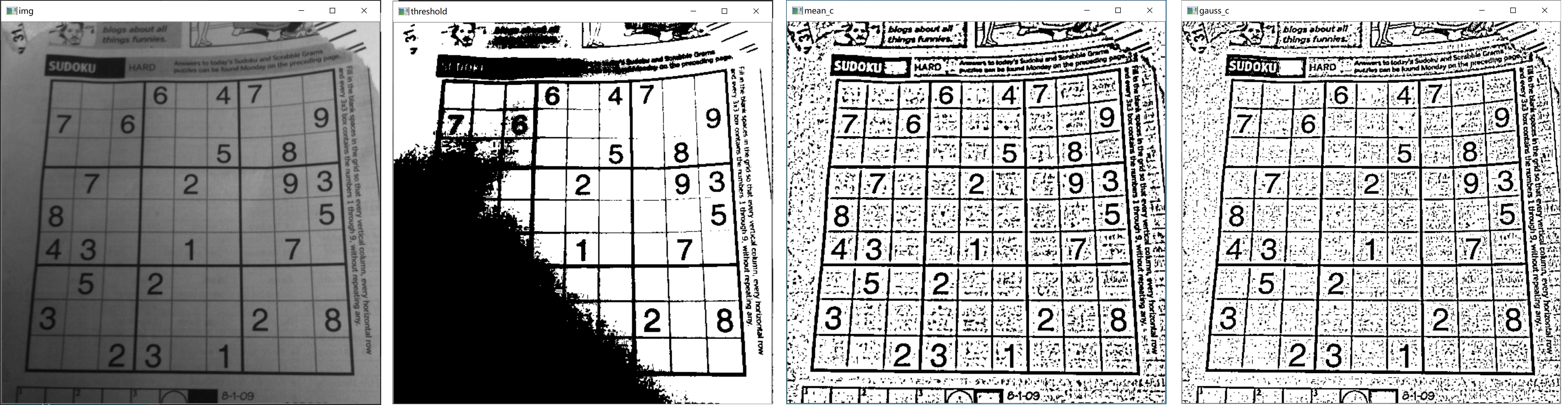
2)全局阈值和自适应阈值的比较,代码如下:
#include <opencv2/core.hpp> #include <opencv2/imgproc.hpp> #include <opencv2/highgui.hpp> using namespace cv; int main() { // read an image Mat img = imread("sudoku.png"); cvtColor(img,img,COLOR_BGR2GRAY); // adaptive Mat dst1, dst2, dst3; threshold(img, dst1, 100, 255, THRESH_BINARY); adaptiveThreshold(img, dst2, 255,ADAPTIVE_THRESH_MEAN_C ,THRESH_BINARY,11,2); adaptiveThreshold(img, dst3, 255,ADAPTIVE_THRESH_GAUSSIAN_C ,THRESH_BINARY,11,2); // show images imshow("img", img); imshow("threshold", dst1); imshow("mean_c", dst2); imshow("gauss_c", dst3); waitKey(0); }
对比显示的结果为:
2 基于边缘
前一篇 <OpenCV 之 边缘检测> 中,介绍了三种常用的边缘检测算子: Sobel, Laplace 和 Canny 算子。
实际上,边缘检测的结果是一个个的点,并不能作为图像分割的结果,必须采用进一步的处理,将边缘点沿着图像的边界连接起来,形成边缘链。
2.1 轮廓函数
OpenCV 中,可在图像的边缘检测之后,使用 findContours 寻找到轮廓,该函数参数如下:
image 一般为二值化图像,可由 compare, inRange, threshold , adaptiveThreshold, Canny 等函数来获得;
hierarchy 为可选的参数,如果不选择该参数,则可得到 findContours 函数的第二种形式;
// 形式一
void findContours ( InputOutputArray image, // 输入图像 OutputArrayOfArrays contours, // 检测到的轮廓 OutputArray hierarchy, // 可选的输出向量 int mode, // 轮廓获取模式 (RETR_EXTERNAL, RETR_LIST, RETR_CCOMP,RETR_TREE, RETR_FLOODFILL) int method, // 轮廓近似算法 (CHAIN_APPROX_NONE, CHAIN_APPROX_SIMPLE, CHAIN_APPROX_TC89_L1, CHAIN_APPROX_TC89_KCOS) Point offset = Point() // 轮廓偏移量 )
// 形式二
void findContours (
InputOutputArray image,
OutputArrayOfArrays contours,
int mode,
int method,
Point offset = Point()
)
drawContours 函数参数如下:
void drawContours ( InputOutputArray image, // 目标图像 InputArrayOfArrays contours, // 所有的输入轮廓 int contourIdx, // const Scalar & color, // 轮廓颜色 int thickness = 1, // 轮廓线厚度 int lineType = LINE_8, // InputArray hierarchy = noArray(), // int maxLevel = INT_MAX, // Point offset = Point() // )
2.2 例程
代码摘自 OpenCV 例程,略有修改
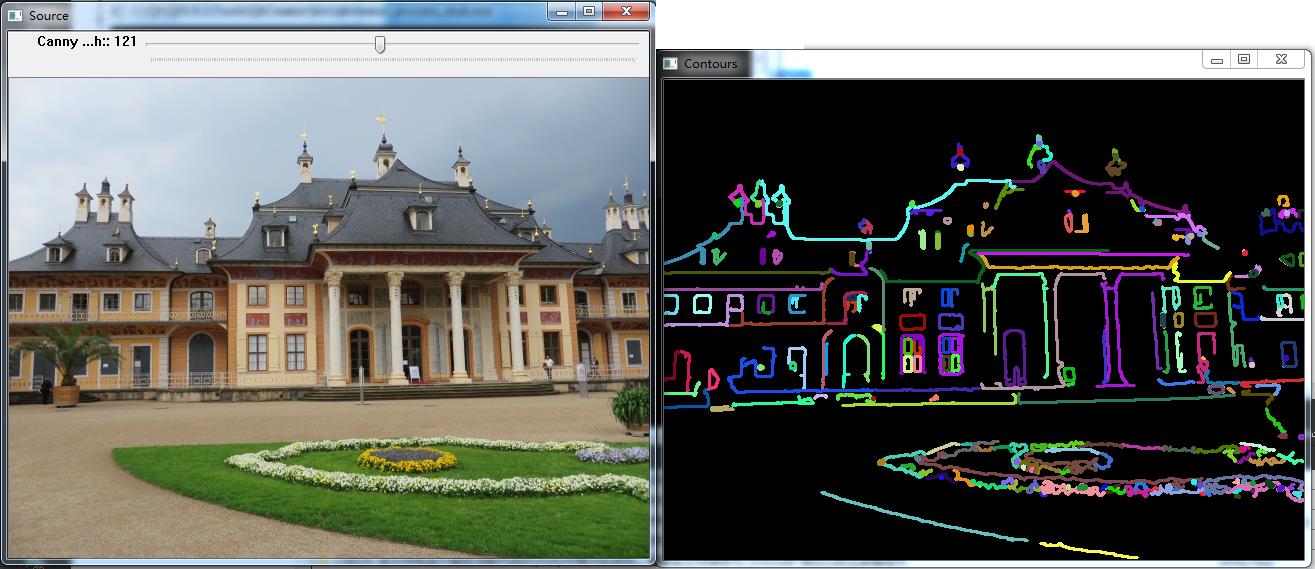
#include "opencv2/imgcodecs.hpp" #include "opencv2/highgui.hpp" #include "opencv2/imgproc.hpp" using namespace cv; using namespace std; Mat src,src_gray; int thresh = 100; int max_thresh = 255; RNG rng(12345); void thresh_callback(int, void* ); int main( int, char** argv ) { // 读图 src = imread("Pillnitz.jpg", IMREAD_COLOR); if (src.empty()) return -1; // 转化为灰度图 cvtColor(src, src_gray, COLOR_BGR2GRAY ); blur(src_gray, src_gray, Size(3,3) ); // 显示 namedWindow("Source", WINDOW_AUTOSIZE ); imshow( "Source", src ); // 滑动条 createTrackbar("Canny thresh:", "Source", &thresh, max_thresh, thresh_callback ); // 回调函数 thresh_callback( 0, 0 ); waitKey(0); } // 回调函数 void thresh_callback(int, void* ) { Mat canny_output; vector<vector<Point> > contours; vector<Vec4i> hierarchy; // canny 边缘检测 Canny(src_gray, canny_output, thresh, thresh*2, 3); // 寻找轮廓 findContours( canny_output, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0) ); Mat drawing = Mat::zeros( canny_output.size(), CV_8UC3); // 画出轮廓 for( size_t i = 0; i< contours.size(); i++ ) { Scalar color = Scalar( rng.uniform(0, 255), rng.uniform(0,255), rng.uniform(0,255) ); drawContours( drawing, contours, (int)i, color, 2, 8, hierarchy, 0, Point() ); } namedWindow( "Contours", WINDOW_AUTOSIZE ); imshow( "Contours", drawing ); }
以 Dresden 的 Schloss Pillnitz 为源图,输出如下:
参考资料
OpenCV Tutorials / imgproc module / Basic Thresholding Operations
OpenCV Tutorials / imgproc module / Finding contours in your image
OpenCV-Python Tutorials / Image Processing in OpenCV / Image Thresholding
<图像处理、分析与机器视觉>_第3版 第 6 章
Topological structural analysis of digitized binary images by border following [J], Satoshi Suzuki, 1985
更新记录
2020年4月26日,增加 “1.3 自适应阈值化” 和 “1.4 示例 - 自适应阈值代码”
以上是关于OpenCV 之 图像分割 的主要内容,如果未能解决你的问题,请参考以下文章