基于EmguCV的摄像机标定及矫正
Posted song2013
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于EmguCV的摄像机标定及矫正相关的知识,希望对你有一定的参考价值。
版权声明:本文为博主原创文章,未经博主允许不得转载。
前言
之前用OpenCV做过摄像机标定及矫正,现在平台换了,改用C#,就用EmguCV做一下,其实就是OpenCV的C#版。
在EmguCV中有两类摄像机标定的类,一个是CvInvoke类,一个是CameraCalibration类,两种标定效果差不多,只不过CvInvoke涉及的函数大多都是指针类型的,而C#对于指针的操作比较麻烦。本文是在CameraCalibration类的基础上完成摄像机标定,用CvInvoke类完成矫正图像。
函数说明
1、角点检测
- public static PointF[] FindChessboardCorners(
- Image<Gray, byte> image,
- Size patternSize,
- CALIB_CB_TYPE flags
- )
Parameters
- image
- Type: Emgu.CV.Image<Gray, Byte>Source chessboard view
- patternSize
- Type: System.Drawing.SizeThe number of inner corners per chessboard row and column
- flags
- Type: Emgu.CV.CvEnum.CALIB_CB_TYPEVarious operation flags
Return Value
Type: PointF[]The corners detected if the chess board pattern is found, otherwise null is returned
注:输入图像需是灰度图,检测之前角点需要开辟空间,如:
- cornersDetected = new PointF[nPoints]; //nPoints表示单幅图像角点总数
- cornersDetected = CameraCalibration.FindChessboardCorners(chessboardImage, patternSize,
- CALIB_CB_TYPE.ADAPTIVE_THRESH | CALIB_CB_TYPE.NORMALIZE_IMAGE);
2、标定函数
- public static double CalibrateCamera(
- MCvPoint3D32f[][] objectPoints,
- PointF[][] imagePoints,
- Size imageSize,
- IntrinsicCameraParameters intrinsicParam,
- CALIB_TYPE calibrationType,
- MCvTermCriteria termCriteria,
- out ExtrinsicCameraParameters[] extrinsicParams
- )
Parameters
- objectPoints
- Type: Emgu.CV.Structure.MCvPoint3D32f[][]The 3D location of the object points. The first index is the index of image, second index is the index of the point
- imagePoints
- Type: System.Drawing..::..PointF[][]The 2D image location of the points. The first index is the index of the image, second index is the index of the point
- imageSize
- Type: System.Drawing.SizeThe size of the image, used only to initialize intrinsic camera matrix
- intrinsicParam
- Type: Emgu.CV.IntrinsicCameraParametersThe intrisinc parameters, might contains some initial values. The values will be modified by this function.
- calibrationType
- Type: Emgu.CV.CvEnum.CALIB_TYPEcCalibration type
- termCriteria
- Type: Emgu.CV.Structure.MCvTermCriteriaThe termination criteria
- extrinsicParams
- Type: Emgu.CV.ExtrinsicCameraParameters[]The output array of extrinsic parameters.
Return Value
Type: DoubleThe final reprojection error注:objectPoints表示棋盘角点在世界坐标系下的坐标,有多少幅棋盘图像就应有多少角点坐标集,以物理尺寸为单位。imagePoints表示角点在图像中的坐标,以像素为单位。返回值是重投影误差。
3、映射矩阵求取
- public static void cvInitUndistortMap(
- IntPtr intrinsicMatrix,
- IntPtr distortionCoeffs,
- IntPtr mapx,
- IntPtr mapy
- )
Parameters
- intrinsicMatrix
- Type: System.IntPtrThe camera matrix (A) [fx 0 cx; 0 fy cy; 0 0 1]
- distortionCoeffs
- Type: System.ntPtrThe vector of distortion coefficients, 4x1 or 1x4 [k1, k2, p1, p2].
- mapx
- Type: System.IntPtrThe output array of x-coordinates of the map
- mapy
- Type: System.ntPtrThe output array of y-coordinates of the map
- private Matrix<float> mapx = new Matrix<float>(height, width);
- private Matrix<float> mapy = new Matrix<float>(height, width);
4、几何变换
- public static void cvRemap(
- IntPtr src,
- IntPtr dst,
- IntPtr mapx,
- IntPtr mapy,
- int flags,
- MCvScalar fillval
- )
Parameters
- src
- Type: System.ntPtr
Source image
- dst
- Type: System.IntPtr
Destination image
- mapx
- Type: System.IntPtr
The map of x-coordinates (32fC1 image)
- mapy
- Type: System.ntPtr
The map of y-coordinates (32fC1 image)
- flags
- Type: System.Int32
A combination of interpolation method and the optional flag CV_WARP_FILL_OUTLIERS
- fillval
- Type: Emgu.CV.Structure.MCvScalar
A value used to fill outliers
程序说明
基于EmguCV摄像机标定及矫正的软件界面如下:
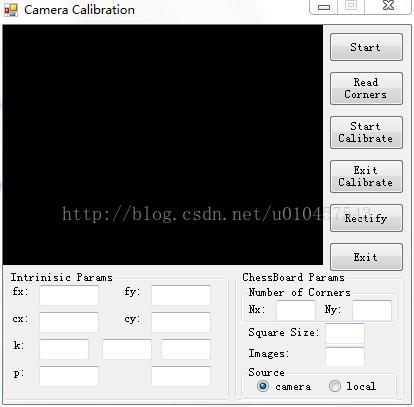
如图所示,界面包含棋盘格信息设置,标定及矫正事件的实现等等。
矫正前后图像对比:
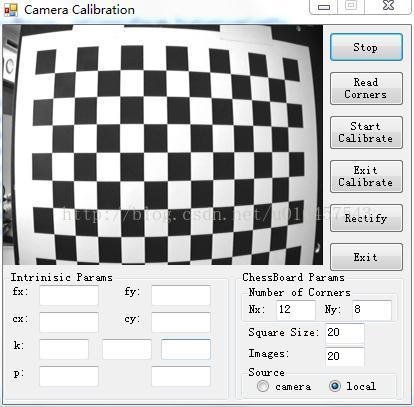
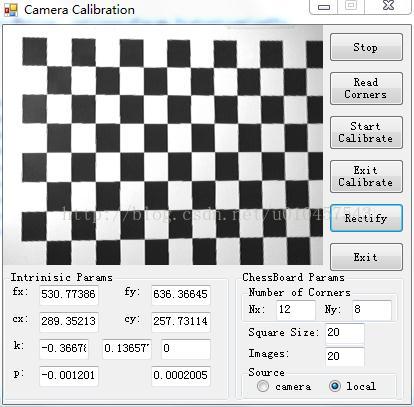
代码实现了从摄像头读取棋盘格图像或者从本地读取图像,图像个数有Imges指定,棋盘格大小有Square Size指定;然后成功检测到角点之后进行摄像头标定,保存角点值和摄像头内参数,通过Rectify按钮实现畸变矫正功能。为避免每次标定时都要检测角点,设置Read Corners按钮,读取角点(包含objectPoints和imagePoints),然后Start Calibrate实现标定。所有的数据都是保存到xml文件中,方便查看和提取。
以上是关于基于EmguCV的摄像机标定及矫正的主要内容,如果未能解决你的问题,请参考以下文章