GTA5自动驾驶二 边沿检测
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了GTA5自动驾驶二 边沿检测相关的知识,希望对你有一定的参考价值。
边沿检测采用Candy算法,比较经典,opencv自带
Candy算法的原理可以参见这篇博文:http://www.tuicool.com/articles/Y3q2Mf
整个流程是这样的:
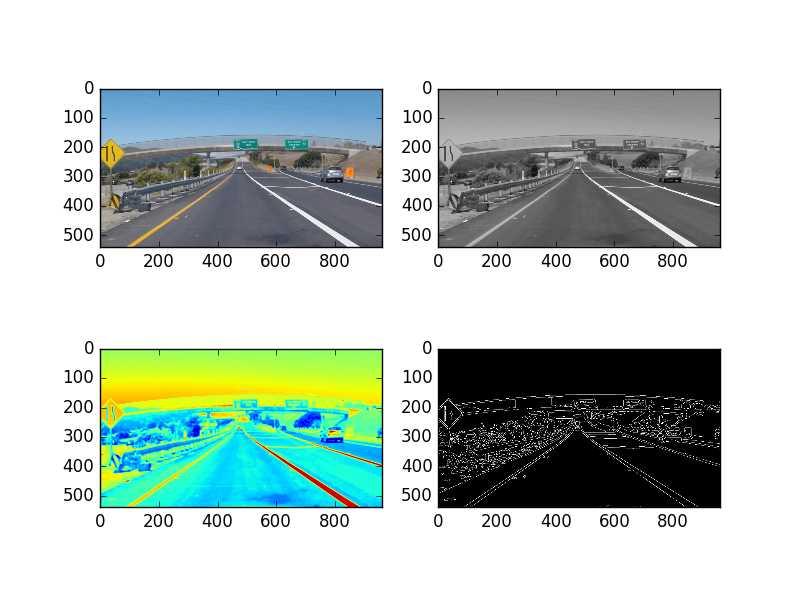
- 读取图像
- 将图像转化为灰度图像
- 运行高斯滤波
- 运行Candy算子得到边沿
示例代码如下:
#! usr/bin/python #coding=utf-8 #doing all the relevant imports import matplotlib.pyplot as plt import matplotlib.image as mpimg import numpy as np import cv2 image = mpimg.imread(‘exit-ramp.jpg‘) gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY) # Define a kernel size for Gaussian smoothing / blurring # Note: this step is optional as cv2.Canny() applies a 5x5 Gaussian internally kernel_size = 5 blur_gray = cv2.GaussianBlur(gray,(kernel_size,kernel_size),10) # Define parameters for Canny and run it # NOTE: if you try running this code you might want to change these! low_threshold = 1 high_threshold = 60 edges = cv2.Canny(blur_gray, low_threshold, high_threshold) # Display the image plt.subplot(221) plt.imshow(image) plt.subplot(222) plt.imshow(gray,cmap=‘gray‘) plt.subplot(223) plt.imshow(blur_gray) plt.subplot(224) plt.imshow(edges, cmap=‘Greys_r‘) plt.show()
运行结果:
以上是关于GTA5自动驾驶二 边沿检测的主要内容,如果未能解决你的问题,请参考以下文章