使用行为树(Behavior Tree)实现游戏AI
Posted Jeason1997
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用行为树(Behavior Tree)实现游戏AI相关的知识,希望对你有一定的参考价值。
———————————————————————
谈到游戏AI,很明显智能体拥有的知识条目越多,便显得更智能,但维护
庞大数量的知识条目是个噩梦:使用有限状态机(FSM),分层有限状态机(HFSM),
决策树(Decision Tree)来实现游戏AI总有那么些不顺意。
试试Next-Gen AI的行为树(Behavior Tree)吧。
虽说Next-Gen AI,但距其原型提出已有约10年时间,而微软Halo系列估计
已用了超过8年了,Spore和一些著名游戏也早已使用行为树作为它们的AI结构。
如从未接触,那wikipedia(http://en.wikipedia.org/wiki/Behavior_Trees)
绝对是入门好资料。
———————————————————————
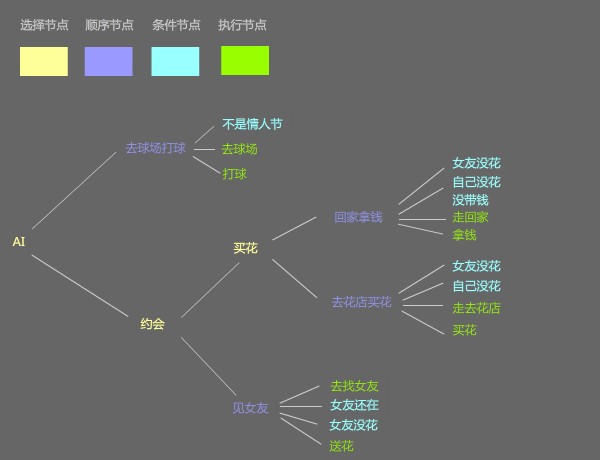
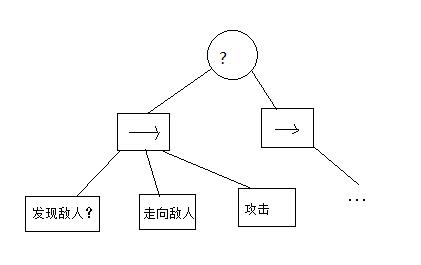
先借用网上的一张图来诠释下行为树到底是怎么样的
———————————————————————
行为树(Behavior Tree)具有如下的特性:
它只有4大类型的Node:
* Composite Node 组合节点
* Decorator Node 修饰节点
* Condition Node 条件节点(叶节点)
* Action Node 动作节点(叶节点)
任何Node被执行后,必须向其Parent Node报告执行结果:成功 / 失败。
这简单的成功 / 失败汇报原则被很巧妙地用于控制整棵树的决策方向。
———————————————————————
先看Composite Node,其实它按复合性质还可以细分为3种:
* Selector Node
当执行本类型Node时,它将从begin到end迭代执行自己的Child Node:
如遇到一个Child Node执行后返回True,那停止迭代,
本Node向自己的Parent Node也返回True;否则所有Child Node都返回False,
那本Node向自己的Parent Node返回False。
* Sequence Node
当执行本类型Node时,它将从begin到end迭代执行自己的Child Node:
如遇到一个Child Node执行后返回False,那停止迭代,
本Node向自己的Parent Node也返回False;否则所有Child Node都返回True,
那本Node向自己的Parent Node返回True。
* Parallel Node
并发执行它的所有Child Node。
而向Parent Node返回的值和Parallel Node所采取的具体策略相关:
Parallel Selector Node: 一False则返回False,全True才返回True。
Parallel Sequence Node: 一True则返回True,全False才返回False。
Parallel Hybird Node: 指定数量的Child Node返回True或False后才决定结果。
Parallel Node提供了并发,提高性能。
不需要像Selector/Sequence那样预判哪个Child Node应摆前,哪个应摆后,
常见情况是:
(1)用于并行多棵Action子树。
(2)在Parallel Node下挂一棵子树,并挂上多个Condition Node,
以提供实时性和性能。
Parallel Node增加性能和方便性的同时,也增加实现和维护复杂度。
PS:上面的Selector/Sequence准确来说是Liner Selector/Liner Sequence。
AI术语中称为strictly-order:按既定先后顺序迭代。
Selector和Sequence可以进一步提供非线性迭代的加权随机变种。
Weight Random Selector提供每次执行不同的First True Child Node的可能。
Weight Random Sequence则提供每次不同的迭代顺序。
AI术语中称为partial-order,能使AI避免总出现可预期的结果。
———————————————————————
再看Decorator Node,它的功能正如它的字面意思:它将它的Child Node执行
后返回的结果值做额外处理后,再返回给它的Parent Node。很有些AOP的味道。
比如Decorator Not/Decorator FailUtil/Decorator Counter/Decorator Time…
更geek的有Decorator Log/Decorator Ani/Decorator Nothing…
———————————————————————
然后是很直白的Condition Node,它仅当满足Condition时返回True。
———————————————————————
最后看Action Node,它完成具体的一次(或一个step)的行为,视需求返回值。
而当行为需要分step/Node间进行时,可引入Blackboard进行简单数据交互。
———————————————————————
整棵行为树中,只有Condition Node和Action Node才能成为Leaf Node,而也
只有Leaf Node才是需要特别定制的Node;Composite Node和Decorator Node均
用于控制行为树中的决策走向。(所以有些资料中也统称Condition Node和Action
Node为Behavior Node,而Composite Node和Decorator Node为Decider Node。)
更强大的是可以加入Stimulus和Impulse,通过Precondition来判断masks开关。
通过上述的各种Nodes几乎可以实现所有的决策控制:if, while, and, or,
not, counter, time, random, weight random, util…
———————————————————————
总的来说,行为树具有如下几种优点,确实是实现AI框架的利器,甚至是一种
通用的可维护的复杂流程管理利器:
> 静态性
越复杂的功能越需要简单的基础,否则最后连自己都玩不过来。
静态是使用行为树需要非常着重的一个要点:即使系统需要某些”动态”性。
其实诸如Stimulus这类动态安插的Node看似强大,
但却破坏了本来易于理解的静态性,弊大于利。
Halo3相对于Halo2对BT AI的一个改进就是去除Stimulus的动态性。
取而代之的做法是使用Behavior Masks,Encounter Attitude,Inhibitions。
原则就是保持全部Node静态,只是根据事件和环境来检查是否启用Node。
静态性直接带来的好处就是整棵树的规划无需再运行时动态调整,为很多优化
和预编辑都带来方便。
> 直观性
行为树可以方便地把复杂的AI知识条目组织得非常直观。
默认的Composite Node的从begin往end的Child Node迭代方式就像是处理一个
预设优先策略队列,也非常符合人类的正常思考模式:先最优再次优。
行为树编辑器对优秀的程序员来说也是唾手可得。
> 复用性
各种Node,包括Leaf Node,可复用性都极高。
实现NPC AI的个性区别甚至可以通过在一棵共用的行为树上不同的位置来
安插Impulse来达到目的。
当然,当NPC需要一个完全不同的大脑,比如70级大BOSS,
与其绞尽脑汁在一棵公用BT安插Impulse,不如重头设计一棵专属BT。
> 扩展性
虽然上述Node之间的组合和搭配使用几乎覆盖所有AI需求。
但也可以容易地为项目量身定做新的Composite Node或Decorator Node。
还可以积累一个项目相关的Node Lib,长远来说非常有价值。
--------------------------------本人补充---------------------------------------
每个节点都应该有以下三种状态:
Running,
Success,
Failed
Running状态用于表明该节点的结果不能立刻获知,比如游戏中的角色进行“向目标移动”
这个动作,很显然这个动作不能在这一帧中立刻完成,当行为树运行到此节点时,并不能
获知是success或者failed,于是返回running,表示该节点正在运行中,并记录此节点
的位置,下一帧运行到此节点的父节点时,则从此节点继续运行,跳过之前的节点。
以上是关于使用行为树(Behavior Tree)实现游戏AI的主要内容,如果未能解决你的问题,请参考以下文章