模拟信号通过哪些步骤转换成数字信号(具体)?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了模拟信号通过哪些步骤转换成数字信号(具体)?相关的知识,希望对你有一定的参考价值。
要过程
http://www.hoodong.com/wiki/%E6%A8%A1%E6%95%B0%E8%BD%AC%E6%8D%A2%E5%99%A8模数转换器 - 正文 把经过与标准量(或参考量)比较处理后的模拟量转换成以二进制数值表示的离散信号的转换器,简称ADC或 A/D转换器。转换器的输入量一般为直流电流或电压,输出量为二进制数码的逻辑电平(+5伏和0伏)。例如,将生产过程变量(温度、压力、流量、力等)或声音信号经过传感器变为模拟量电信号,然后由模数转换器变换为适于数字处理的形式(二进制数码),送入计算机、数字存储设备、数据传输设备处理或存储,或以数字或图形方式显示。
模数转换过程包括量化和编码。量化是将模拟信号量程分成许多离散量级,并确定输入信号所属的量级。编码是对每一量级分配唯一的数字码,并确定与输入信号相对应的代码。最普通的码制是二进制,它有2n个量级(n为位数),可依次逐个编号。模数转换的方法很多,从转换原理来分可分为直接法和间接法两大类。
直接法是直接将电压转换成数字量。它用数模网络输出的一套基准电压,从高位起逐位与被测电压反复比较,直到二者达到或接近平衡(见图)。控制逻辑能实现对分搜索的控制,其比较方法如同天平称重。先使二进位制数的最高位Dn-1=1,经数模转换后得到一个整个量程一半的模拟电压VS,与输入电压Vin相比较,若Vin>VS,则保留这一位;若Vin<Vin,则Dn-1=0。然后使下一位Dn-2=1,与上一次的结果一起经数模转换后与Vin相比较,重复这一过程,直到使D0=1,再与Vin相比较,由Vin>VS还是Vin<V 来决定是否保留这一位。经过n次比较后,n位寄存器的状态即为转换后的数据。这种直接逐位比较型(又称反馈比较型)转换器是一种高速的数模转换电路,转换精度很高,但对干扰的抑制能力较差,常用提高数据放大器性能的方法来弥补。它在计算机接口电路中用得最普遍。
间接法不将电压直接转换成数字,而是首先转换成某一中间量,再由中间量转换成数字。常用的有电压-时间间隔(V/T)型和电压-频率(V/F)型两种,其中电压-时间间隔型中的双斜率法(又称双积分法)用得较为普遍。
模数转换器的选用具体取决于输入电平、输出形式、控制性质以及需要的速度、分辨率和精度。
用半导体分立元件制成的模数转换器常常采用单元结构,随着大规模集成电路技术的发展,模数转换器体积逐渐缩小为一块模板、一块集成电路。
参考书目
周明德:《微型计算机硬件软件及其应用》,清华大学出版社,北京,1984。 参考技术A 买一个转换器就OK了。
Camera基本概念
1. 摄像头分类
摄像头可分为数字摄像头和模拟摄像头两大类。数字摄像头可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将其储存在计算机里。模拟摄像头捕捉到的视频信号必须经过特定的视频捕捉卡将模拟信号转换成数字模式,并加以压缩后才可以转换到计算机上运用。数字摄像头可以直接捕捉影像,然后通过串、并口或者USB接口传到计算机里。
2. 摄像头结构
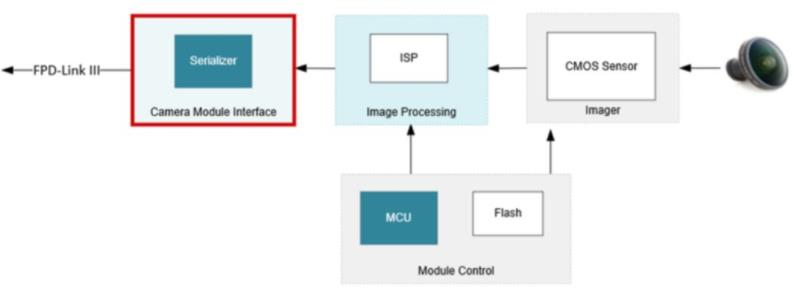
数字摄像头,主要有玻璃透镜、CMOS传感器、图像信号处理器(ISP)、电源管理、串行器、微处理器器等功能单元构成,如下图所示,但是电池保护单元一般都是在解串单元那边,同时因为数字摄像头体积非常小,选型过程中尽量需要考虑小体积、高效率的器件。
下图是一个摄像头的基本结构:
2.1 硬件接口
2.1.1 摄像头
摄像头传感器由摄像头接口和控制接口(一般为i2c)组成,摄像头接口用于传输传感器采集到的数据,控制接口用于控制摄像头传感器(例如被master读写芯片寄存器)。

2.1.2 芯片
芯片上由多个摄像头控制器,多个摄像头接口,多个i2c控制器(i2c总线)。
摄像头控制器负责控制摄像头接口和处理接收到的数据,摄像头接口负责传输图像数据,i2c控制器负责传输控制信息。

2.1.3 摄像头传感器和芯片的接法
摄像头控制器可以选择控制哪个摄像头接口。
3. 摄像头主要部件
一般来说,camera 主要是由 lens 和 sensor IC 两部分组成,其中有的 sensor IC 集成 了 DSP,有的没有集成,但也需要外部 DSP 处理。细分的来讲,camera 设备由下边几部 分构成:
lens(镜头) 一般 camera 的镜头结构是有几片透镜组成,分有塑胶透镜(Plastic)和玻璃透镜(Glass) ,通常镜头结构有:1P,2P,1G1P,1G3P,2G2P,4G 等。
sensor(图像传感器)是一种半导体芯片,有两种类型:CCD(Charge Coupled Device)即电荷耦合器件的缩写 和 CMOS(Complementary Metal-Oxide Semiconductor)互补金属氧化物半导体。
sensor 将从 lens 上传导过来的光线转换为电信号, 再通过内部的 AD 转换为数字信号。 由于 sensor 的每个 pixel 只能感光 R 光或者 B 光或者 G 光, 因此每个像素此时存贮的是单色的, 我们称之为 RAW DATA 数据。
要想将每个像素的 RAW DATA 数据还原成三基色,就需要 ISP 来处理。 ISP(图像信号处理) 主要完成数字图像的处理工作,把 sensor 采集到的原始数据转换为显示支持的格式。
CAMIF(camera 控制器) SoC芯片上的 camera 接口电路,对设备进行控制,接收 sensor 采集的数据并交给 CPU,送入 LCD 进行显示。

4. Camera接口分类
Camera接口实在多种多样,总的来说分为两大类:Parallel(并口)、Serial(串口)以及USB口。
图像传输接口主要分两种,并口 ITU 和串口 CSI。CSI 是 MIPI CSI 的简称,鉴于 MIPI CSI 的诸多优点,在手机相机领域,已经广泛使用 MIPI-CSI 接口传输图像数据和各种自定义数据。外置 ISP 一般包含 MIPI-CSIS 和 MIPI-CSIM 两个接口,内置 ISP 一般只需要 MIPI-CSIS 接口。
4.1 Parallel–并口
并口一般称DVP接口(Digital Video Port),就是将图像信号按照8bit ,12bit等数据格式(看ISP或baseband是否支持),在并行时钟的作用下,一次性传输8位或者12位,这种方式最大的特点就是需要的数据线较多,并行时钟PCLK极限约在96MHZ左右,且走线长度不能过长,所以DVP的最大速率最好控制在72M以下。500W还可以勉强用DVP,800W及以上都采用MIPI接口。
例如ITU 并口接口。
4.2 Serial–串口
串口可以理解为将数据排队传输,serial主要分为以下几种:
4.2.1 MIPI接口:
移动产业处理器接口(Mobile Industry Processor Interface:简称MIPI )1对时钟线,1~4 lane对数据线,单lane最高的传输速率可以达到270Mbps,且都是差分走线,有比较强的抗干扰性。

上图是MIPI接口的接线方式,可以看到数据和时钟都是差分对。
4.2.2 LVDS接口:
Low-Voltage Differential Signaling 低电压差分信号,是一种低功耗、低误码率、低串扰和低辐射的差分信号技术,这种传输技术可以达到155Mbps以上,LVDS技术的核心是采用极低的电压摆幅高速差动传输数据,是一种电流传输方式。
LVDS主要用于视频传输的2个领域:camera和主控、LCD和主控。LVDS类的摄像头就没有i2c数据线作为控制线了,控制信号也由LVDS传输。
LVDS接口只用于传输视频数据,MIPI DSI不仅能够传输视频数据,还能传输控制指令。
4.3 USB口
UVC全称 USB video class或者USB device class,是Microsoft 与另外几家设备厂联合推出的USB视频捕获设备定义的协议标准,目前已经成为USB org标准之一。
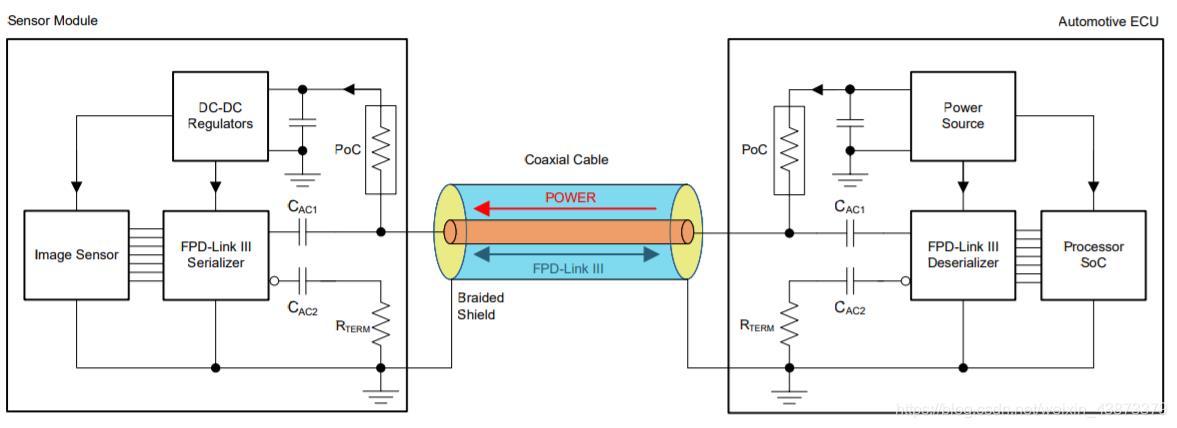
5. 摄像头连接
左边是摄像头,右边是SOC,摄像头和SOC之间通过双绞线连接(串行线)。
以上是关于模拟信号通过哪些步骤转换成数字信号(具体)?的主要内容,如果未能解决你的问题,请参考以下文章